
A compressible two-phase flow model for pressure oscillations in air entrapments following green water impact events on ships
Abstract
A significant part of all structural damage to conventional ships is caused by complex free-surface events like slamming, breaking waves, and green water. During these events air can be entrapped by water. The focus of this article is on the resulting air pockets affecting the evolution of the hydrodynamic impact pressure that loads the ship’s structure.
ComFLOW is a computationally efficient method based on the Navier–Stokes equations with a Volume-of-Fluid approach for the free surface, designed to perform multiphase simulations of extreme free surface wave interaction with maritime structures. We have extended ComFLOW with a Continuum Surface Force (CSF) model for surface tension, thereby completing our method for representing gas-water interaction after free surface wave impacts. The implementation was verified with benchmark cases addressing all relevant aspects of the dynamics of entrapped air pockets. The implementation was validated by means of a dam-break experiment, a characteristic model for green water impact events.
The method – having been verified and validated – was applied to a dam-break simulation for a different setting in which the impact on a wall leads to an entrapped air pocket. Surface tension was found not to have an influence on entrapped air pocket dynamics of air pockets with a radius larger than 0.08 [m]. For wave impacts it was found that the effect of compression waves in the air pocket dominates the dynamics and leads to pressure oscillations that are of the same order of magnitude as the pressure caused by the initial impact on the base of the wall. The code is available at: https://github.com/martin-eijk/2phase.git.
1.Introduction
Hydrodynamic impact loading accounts for more than 10% of structural damage to conventional ships [33]. There are multiple classes of wave impact such as those resulting from slamming, waves breaking against the structure, and green water.
In rough seas, large amounts of water can flow over the ship’s deck; this is called green water. Green water from the side of the ship has already been recorded to cause damage midships and further aft on several maritime vessels [6,32]. A green water event is illustrated in Fig. 1. During green water events involving a complex configuration of the free surface, air and water interact in a way that can lead to entrained air and entrapment of large air pockets. By entrapping an air pocket between the water and the structure, the pocket can have a cushioning effect on the peak pressure on the one hand [5,27]. On the other hand, it can give an increase of the acting force on the structure during a wave impact [5,26] and the pressure oscillations in the air pocket can increase pressure levels on the structure being impacted [27] as well as induce resonant fluid-structure interaction [3]. Naval architects are interested in determining these pressures for design.
The pressures on marine structures and parts of these structures can be predicted by modelling the dynamics of both water and the entrapped compressible air. To model the interaction between water and air accurately, a sharp representation of the free surface is needed. One method capable of simulating extreme free-surface flow in a computationally efficient way is ComFLOW, which has been under development for maritime applications since [12].
Fig. 1.
Green water event after slamming (C. Sun (2013), Monsoondiaries).

ComFLOW, with its most recent implementation described by [36], is based on the Navier–Stokes equations for the motion of an aggregated fluid with varying properties to model the combination of an incompressible liquid and a compressible gas phase. A fixed Cartesian grid is used with a staggered configuration of variables within a cell. The convective term is approximated with a second-order upwind scheme and the time integration is based on a second-order Adams–Bashforth scheme. The pressure is solved from a Poisson equation, after which the velocity is solved from the newly computed pressure gradients. To describe the free surface the Volume-of-Fluid (VoF) method is used with piecewise-linear line segments to reconstruct the position of the free surface within cells (PLIC). The treatment of the density at the free surface lead to serious errors in the form of so-called spurious velocities [30], which affected the evolution of the impact pressure. A gravity-consistent averaging method for calculating the density at the cell faces was developed to prevent these spurious velocities.
We have made an implementation based on ComFLOW to investigate the effect of surface tension on the dynamics of the pressure in entrapped air pockets during wave impacts. The important aspects to entrapped air pockets are:
the position of the free surface,
surface tension,
viscosity,
compressibility.
investigated the difference between piecewise-constant (SLIC) and piecewise-linear representation (PLIC) and the role of gravity-consistent density averaging,
implemented a surface tension model based on [4],
evaluated the effect of the term
We have performed a verification study with a – to our knowledge – unique set of cases that test all relevant aspects of entrapped air pocket dynamics
standing capillary waves and an oscillating initially square rod that tests the combined effect of surface tension and viscosity,
a rising bubble to test for the combination of buoyancy (gravity) and surface tension,
a shock tube to test for compressibility.
2.Mathematical model
The flow of two phases is modelled as an aggregated fluid with variable properties representing incompressible water and compressible air. By relaxing the pressure of the two phases to a common value, the flow can be described by one continuity equation and one momentum equation [25]. This assumption leads to a continuous velocity field. The continuity equation is given by
The momentum equation in integral form is given by
The liquid is modelled as incompressible, while the density in the air is allowed to vary. This requires an additional equation with respect to solving the Navier–Stokes equations for incompressible media. Instead of solving for conservation of energy explicitly, an equation of state is used for the air density. The temperature is assumed constant, the air density is assumed barotropic,
The free-surface indicator function is displaced as follows:
All domain boundaries in this article are assumed closed,
3.Numerical discretisation
3.1.Algorithm
The governing equations are discretized by means of a finite volume method on a fixed Cartesian grid with staggered variables. The velocities are defined on cell faces while the density, the pressure and the curvature are defined in cell centers.
Using cell labelling, we distinguish between the liquid phase, the gas phase and representations of structures in the domain. Cells completely filled by structures are labelled B(ody) cells. The cells filled with air are labelled E(mpty) (the E-label name is a residue from when ComFLOW was one phase). Cells with some liquid, adjacent to E-cells are labelled S(urface) cells. All other cells are labelled F(luid) cells. This means that a F-cell never connects with an E-cell. Note that a F-cell is not necessarily completely filled with liquid.
Time integration of the momentum equation is implicit for the pressure, and explicit for the convective and diffusive terms of the momentum equation. The convective and diffusive terms are integrated in time with a second-order Adams–Bashforth scheme. The time discrete version of the continuity equation is
By substituting Eq. (6) in Eq. (5), a Poisson equation for the pressure is obtained
The density in the cell center at time level n is calculated by
The liquid fraction is indicated by
3.2.Viscosity
Wemmenhove [35], and also Plumerault [27], neglect the term

where τ indicates the shear stress. The boxed terms are added when the term
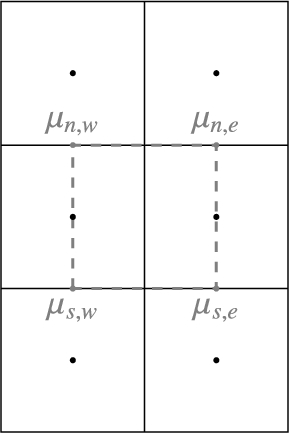
The dynamic viscosities at the top and bottom of the staggered control volume in horizontal direction are needed to find the derivative, see Fig. 2. These are found by linear interpolation between the corner point viscosity values
Fig. 2.
Corner points of μ for staggered control volume.
4.Free-surface displacement
The free surface is displaced with the discretization of Eq. (4) using
4.1.Local height function
SLIC has flotsam and jetsam (small droplets disconnecting from the surface) as major drawback. As a remedy, SLIC is combined with a local height function, consisting of three cells around the S-cell in all axis directions [14]. Instead of updating the volume fraction of the S-cells separately, the height function is updated, after which the water is redistributed depending on its original surface orientation. With a local height function flotsam and jetsam are practically absent from simulations. We use the same height function to assess the local curvature for the application of surface tension.
4.2.Curvature
To implement surface tension, the curvature κ needs to be calculated in every center of a S-cell. To calculate the mean curvature, the local height function based on the surface orientation is used [20]. The grid-aligned free surface orientation is determined by rounding the gradient of the height function. When the free surface is oriented in x-direction (i.e. horizontally), the curvature for the free surface can be calculated from (see Fig. 3)
Fig. 3.
Notation for curvature κ.
4.3.Gravity-consistent density interpolation
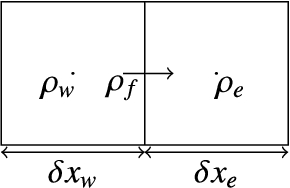
Like the pressure, the density is defined at cell centers. In the discretization of the governing equations, the density is also needed at the cell faces. Several alternatives for calculating the density at cell faces are available. We employ a cell-weighted average of the adjacent-cell center values, see Fig. 4
Fig. 4.
Notation for cell-weighted averaging.
It is demonstrated by several authors [13,16,30,36] that this method leads to spurious velocities around the free surface. From the perspective of offshore applications where the gravity force dominates, spurious velocities are caused by an imbalance between gravity and the pressure gradient.
To balance these forces, both terms need to be discretized in the same way. The requirement
Fig. 5.
SLIC (dashed lines) of interface for density interpolation to cell faces.
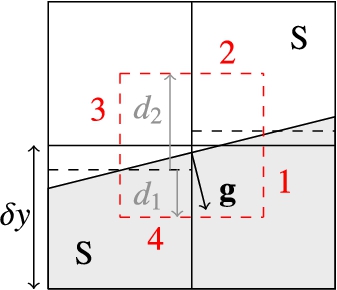
Applying the gravity-consistent averaging method with SLIC, it prevents spurious velocities in many, but not all circumstances. Especially near cells with volume fractions of 0.5, the gravity-consistent method gives large errors in combination with SLIC. This because of the lower accuracy of the free surface reconstruction compared to PLIC. As an example, the requirement
Table 1
Cell-face densities multiplied by the gravity and the normal direction of the dashed line for Fig. 5
| Gravity-consistent | Cell-weighted | |
| −10,000 | −7,500 | |
| −10 | −2,500 | |
| 10 | 2,500 | |
| 5,000 | 7,500 | |
| −5,000 | 0 |
The effect of the residuals in Table 1 is illustrated in Fig. 6 for a domain size of
Fig. 6.
Liquid fraction- and velocity field: (b) gravity-consistent averaging (max. 0.4 [m/s]) versus (c) cell-weighted averaging (max.
![Liquid fraction- and velocity field: (b) gravity-consistent averaging (max. 0.4 [m/s]) versus (c) cell-weighted averaging (max. 1·10−9 [m/s]).](https://content.iospress.com:443/media/isp/2019/66-4/isp-66-4-isp200278/isp-66-isp200278-g006.jpg)
4.4.Capillary forces
Because we chose an aggregated-fluid approach to keep computational costs in check, the capillary force is added to the momentum equation as a body force. Two options considered for the implementation of the body force are Continuum Surface Force (CSF) [4] and Sharp Surface Force (SSF) [13]. Of the two, SSF is formally more accurate, but CSF is less involved and has similar practical accuracy, because the error resulting from the imbalance between pressure and surface tension is dominated by how the curvature of the free surface is estimated [1].
The density in CSF is averaged between phases (
Fig. 7.
Cell face value of κ when using SLIC.
5.Verification and validation
Our implementation is verified with several cases chosen to test for all essential aspects of the dynamics of entrapped air pockets. They are: a 2D standing viscous capillary wave to compare the interaction of surface tension and viscosity near the free surface to an analytical solution; a 2D planar oscillating rod to compare the same interaction along the circumference of a circle with a benchmark; a 2D rising bubble to compare the interaction of buoyancy (gravity) and surface tension to a benchmark; and a 1D shock tube to compare the effect of compressibility after impacts to an analytical solution.
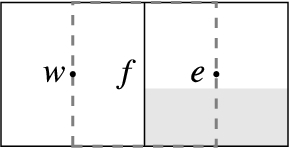
5.1.2D standing viscous capillary wave
Fig. 8.
Setup for simulation of capillary wave.
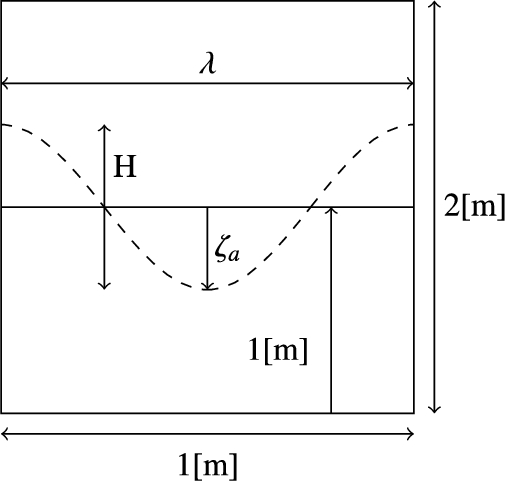
Standing wave simulations can be used to asses the performance of the numerical method for free-surface waves. All important free-surface dynamics are included, while the domain is conveniently limited [34]. Standing capillary waves are driven by surface tension. We simulated them with zero gravity to verify the CSF model used for the representation of surface tension described in Section 4.4. The setup with a domain of
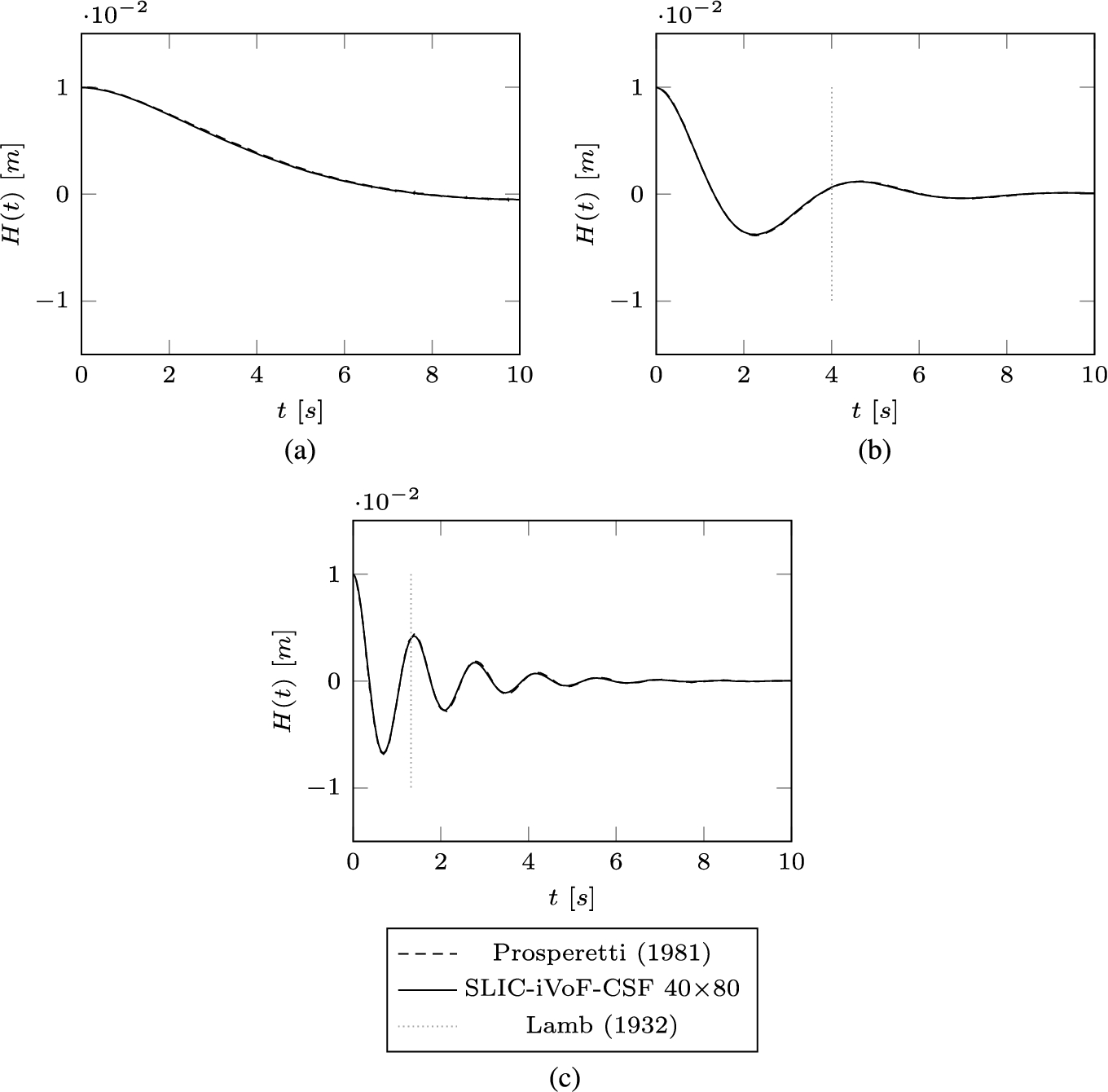
Fig. 9.
Capillary standing wave for different ratios compared with analytical solutions (a)
5.2.2D planar oscillating rod
Another test case for the CSF model is an initially square 2D planar rod of liquid in gas where oscillations are generated by capillary forces. This case has a direct relation to an oscillating air pocket entrapped by a wave impact. Our numerical results are compared with the results of [31] who used ANSYS Fluent.
For the simulation, a square of liquid with an area of
The simulation results are presented in terms of diameter as a function of time, shape of the rod and the pressure. The change of the rod diameter over time is compared with the results of [31] in Fig. 10(a).
![(a) Diameter and (b) average pressure of the bubble over time compared with [31].](https://content.iospress.com:443/media/isp/2019/66-4/isp-66-4-isp200278/isp-66-isp200278-g010.jpg)
The figure shows that the diameter oscillates towards the theoretical diameter and that the oscillations decrease over time as a result of both physical and numerical dissipation (the latter becoming less with grid refinement). The pressure in the bubble at equilibrium should be equal to
In Figs 11 and 12 the volume fraction and pressure over time are compared. Note that a different color scale is used than by [31], but these graphs are presented to demonstrate that our shape and our pressure maxima and minima match with their results, especially at the beginning. There is less of a match in Fig. 12(e). This is because the size of the oscillations in our method did not attenuate by the same amount as in [31] at the time of the snapshot; our method has less dissipation. The same conclusion is found from Fig. 10(b).
Fig. 11.
Volume fraction against time compared with [31] (left); (a) 0.01 [s], (b) 0.05 [s], (c) 0.09 [s], (d) 0.13 [s].
![Volume fraction against time compared with [31] (left); (a) 0.01 [s], (b) 0.05 [s], (c) 0.09 [s], (d) 0.13 [s].](https://content.iospress.com:443/media/isp/2019/66-4/isp-66-4-isp200278/isp-66-isp200278-g011.jpg)
Fig. 12.
Pressure against time compared with [31] (left); (a) 0.49 [s], (b) 0.51 [s], (c) 0.67 [s], (d) 0.75 [s], (e) 0.79 [s].
![Pressure against time compared with [31] (left); (a) 0.49 [s], (b) 0.51 [s], (c) 0.67 [s], (d) 0.75 [s], (e) 0.79 [s].](https://content.iospress.com:443/media/isp/2019/66-4/isp-66-4-isp200278/isp-66-isp200278-g012.jpg)
5.3.2D rising bubble
The following test case is for the combination of buoyancy (gravity), viscosity and surface tension. Our results are compared with the benchmark for a rising bubble [17]. This benchmark was created due the absence of analytical solutions and used for quantitative comparison of incompressible interfacial flow codes. The initial fluid configuration of the 2D rising bubble test case is shown in Fig. 13.
Fig. 13.
Flow domain for 2D rising bubble.
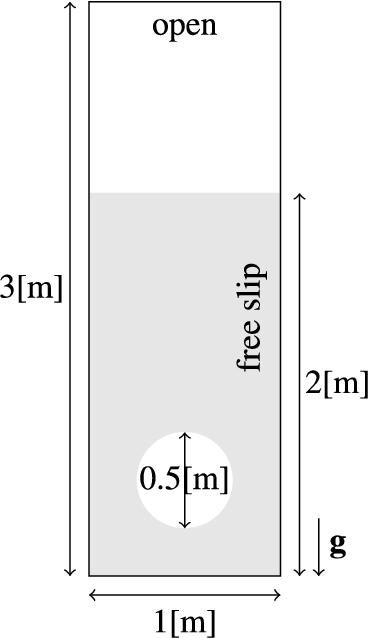
In the benchmark, both water and air are incompressible. The density of the water and air are 1,000 [kg/m3] and 100 [kg/m3], respectively. Further parameter values are shown in Table 2.
Table 2
2D rising bubble parameter variations. Simulation 3 corresponds to the benchmark values
| Test | Re [–] | |||
| Benchmark | 10 | 1 | 24.5 | 35 |
 | 0.01 | 0 | ||
 | 0.01 | 24.5 | ||
 | 10 | 1 | 24.5 | 35 |
The spatial mean rise velocity
Before making the comparison between our implementation, the results of [36] and the benchmark, we investigated the setup with parameter variations. These simulations are indicated in Table 2 with numbers ranging from 1 to 3. For these simulations, a grid of
Fig. 14.
Spatial mean velocity for all the rising bubble cases using the original method ComFLOW with a grid size of
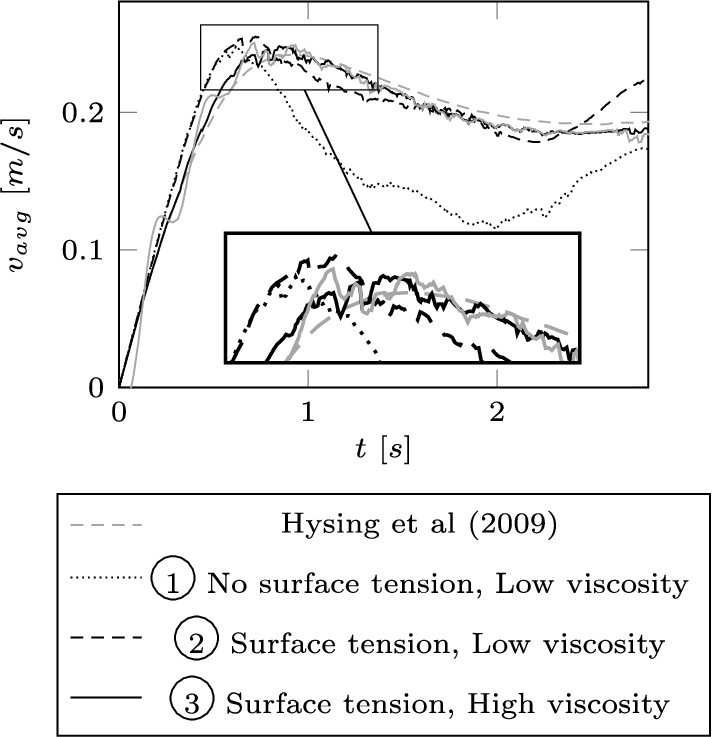
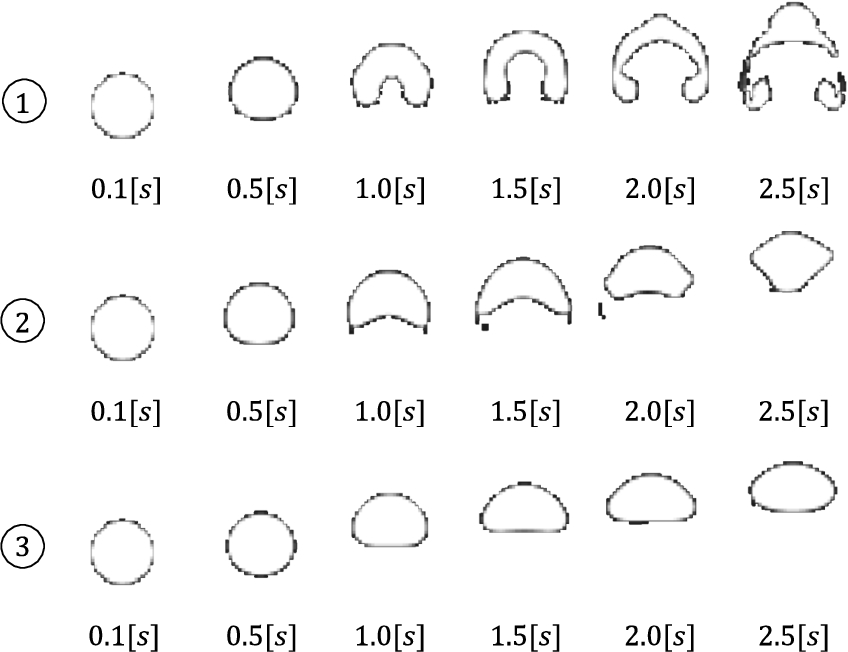
From the figures, we find that the evolution of the spatial mean velocity and the geometry of the bubble are highly dependent on surface tension and viscosity. Without surface tension (simulation 1), the rising velocity after the penetration of the jet is lower than with surface tension, because the bubble becomes wider as it rises. With a high surface tension for simulation 2, the bubble does not become as wide and does not slow down as much. The bubble reaches a higher maximum velocity and the bubble’s acceleration (after 2.2 [s]) occurs earlier in simulation 2 than in simulation 3 due to larger viscous stresses in simulation 3. Simulation 3 has the same parameters as the benchmark.
With the implementation in [35], we found by varying parameters, that we were never able to capture the benchmark’s spatial mean velocity when it is at maximum. After more careful consideration, it was concluded that the viscosity model was incomplete. Upon adding the boxed terms in Eq. (10) a better comparison with the benchmark was obtained. This is demonstrated in Fig. 16. With the same grid size of
![Spatial mean velocity compared with the benchmark of [17] with a grid resolution of 80×240.](https://content.iospress.com:443/media/isp/2019/66-4/isp-66-4-isp200278/isp-66-isp200278-g016.jpg)
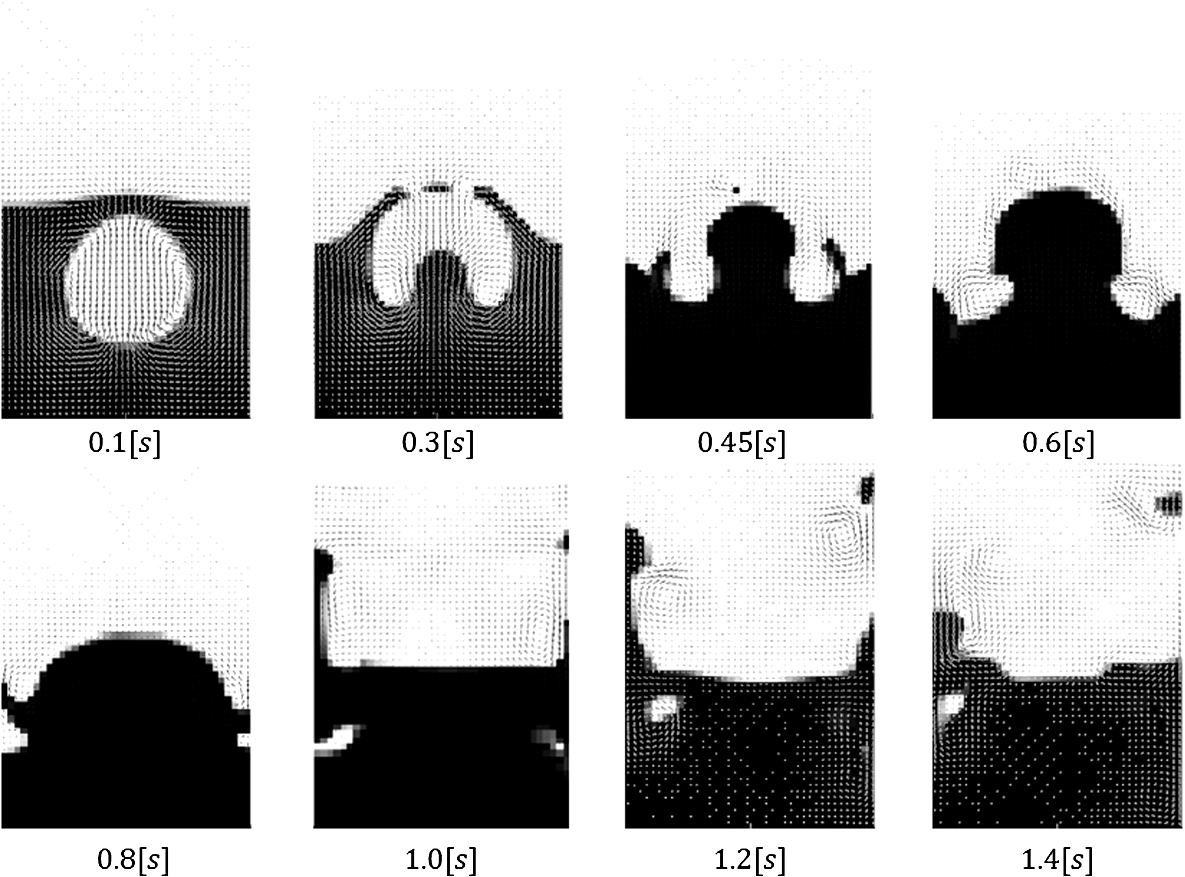
To investigate how our method deals with two merging interfaces, the free surface and the air-water interface of the bubble, an additional simulation was performed with a similar air bubble interface configuration and a lowered free surface. It is shown in Fig. 17 for a numerical simulation how the rising air bubble protrudes through the free surface. Note that this event was not part of the benchmark.
Fig. 17.
Snapshots of the 2D rising bubble passing through the interface in order of time.
5.4.1D shock tube
By entrapping an air pocket between the water and the structure, the pocket is compressed and can have a cushioning effect on the peak pressure during a wave impact [5,27]. The modelling of the compressibility of the air is tested with the simulation of a shock wave. Note that in our case a non-conservative momentum equation is solved which results in diffused shock waves. The interest for our slamming applications, however, is not in the exact position of the shock, but rather on the associated pressure levels.
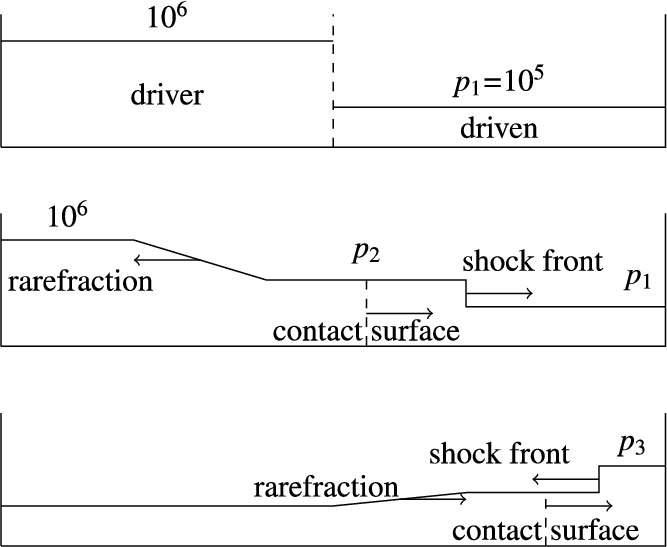
The simulation is based on [10], who derived an analytical solution for a 1D shock tube. The tube is simulated with unit length in two simulations. It is completely filled by gas (
Figure 18 shows the initial configuration of the shock tube, divided in a driver section with the higher pressure and a driven section with a lower pressure. The figure also shows the relevant stages of the evolution of the pressure. When released, two propagating fronts are created, moving in opposite direction, the shock front and the rarefraction. The pressure immediately upstream of the shock is called the contact surface (
The pressure downstream of the shock after reflection from the domain wall has taken place (
Fig. 18.
Initial condition and relevant stages of the pressure in a shocktube simulation.
The results of the numerical simulations are plotted in Fig. 19. The figure shows the pressure in the domain for different moments in time. The simulated shock front moves with an average speed of
When using 400 grid cells, pressure values
Fig. 19.
(Reflected) shock front in terms of the pressure at different time levels (400 grid cells and 600 grid cells in the enlargement.
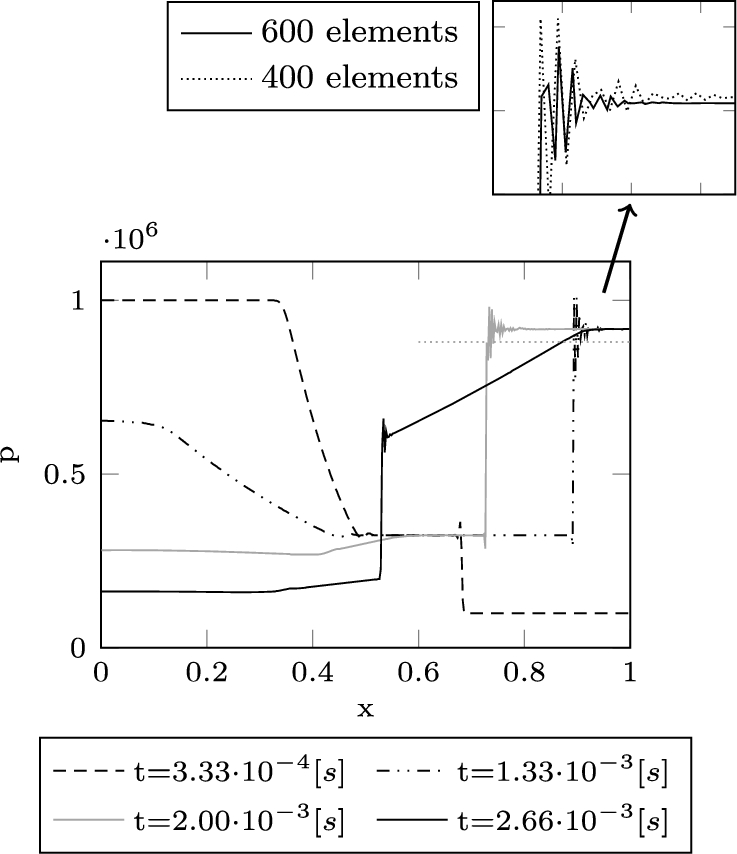
It is demonstrated that the simulation results for the 1D shock tube converge for a larger number of grid cells and that they converge to the analytical values. The wiggles observed near the shock front become smaller with an increased number of grid cells. They do not grow in time and are not expected to interfere with our interpretation of the pressure levels in wave slamming events with enclosed air pockets.
5.5.Dam-break experiment
The final comparison before moving on to our main result is for the onset of a wave impact event. The present implementation is validated against the experiments of [23] who focus on the evolution of the free surface in a dam-break event. A dam-break is a characteristic model for wave impact events.
The domain and initial condition for the experiment by [23] is shown in Fig. 20. The size of the domain is
Fig. 20.
Setup dam-break 2D case.
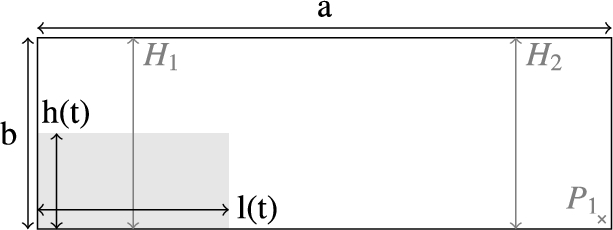
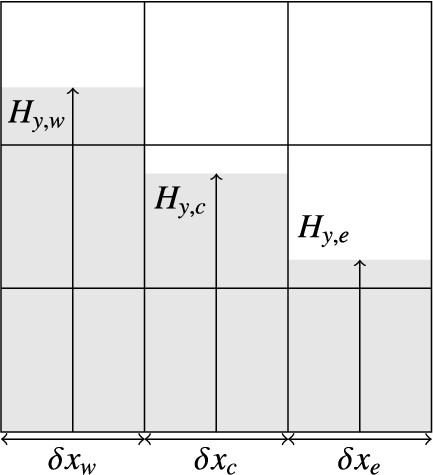
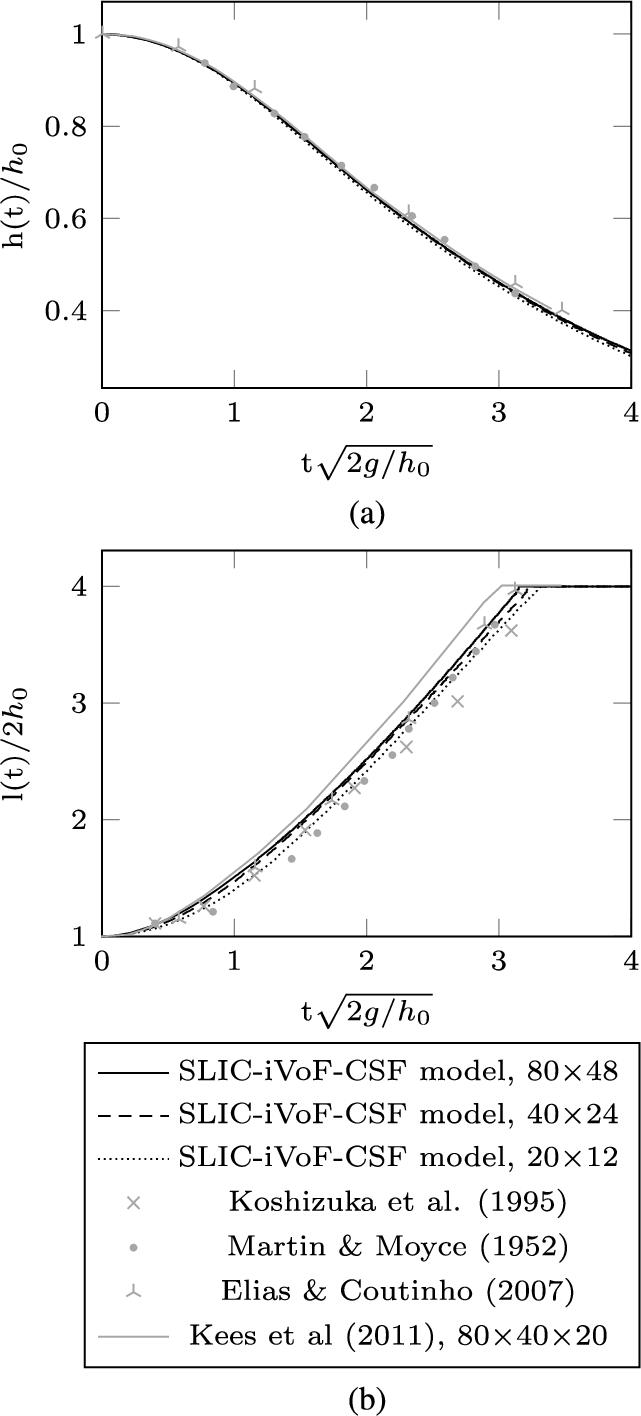
When the dam is released, the initial water level drops and a front propagates towards the opposite end of the domain. The free surface in [23] was measured along the left wall as an elevation
Fig. 21.
Change of 2D dam over time in (a) height (h) and (b) length (l).
6.Main result
As mentioned, a dam-break is a representative case for wave impact phenomena, especially for green water. The objective is to demonstrate with dam-break simulations that oscillations in entrapped air pockets can cause pressure level variations of the order of the impact pressure. Our simulations are run in 2D, because of the increased likelihood of entrapping a pocket of air. Also, because the ratio of buoyancy force over viscous forces is lower in 2D, the rising velocity is smaller and air pockets persist longer. The simulation results are to be compared to the experiments conducted at MARIN (Maritime Research Institute Netherlands), in which the free surface and impact pressure on a wall in the path of the flow were measured.
The setup of the experiment is similar to before, see Fig. 20. The domain is
Fig. 22.
Difference in pressure for SLIC with height function and PLIC Youngs.
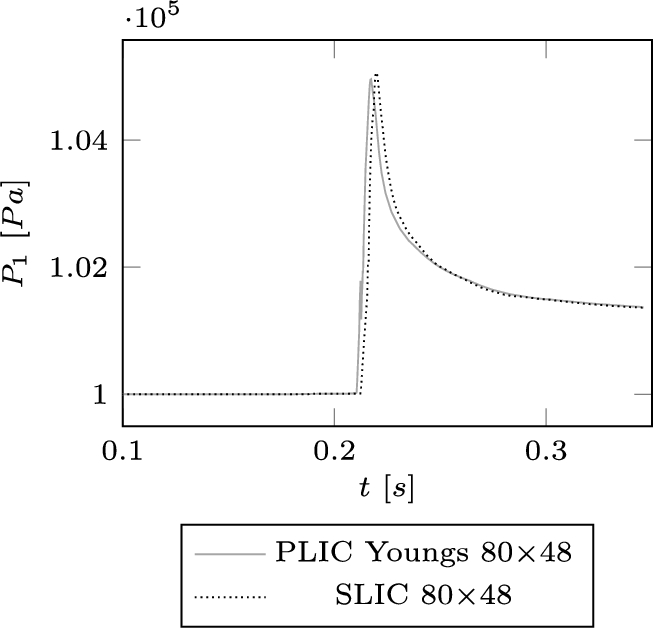
Our main interest goes out to finding the impact pressure in the most efficient way possible. A major factor determining the efficiency of the method is how the free surface is reconstructed. In the next simulation, Young’s PLIC with gravity-consistent density averaging is compared to SLIC with cell-weighted density averaging for the dam-break in the MARIN experiment. The peak pressure is measured at the foot of the wall (
Fig. 23.
The results of the present model for the dam-break case compared with experimental results of MARIN and numerical results of [36]; (a) the water height
![The results of the present model for the dam-break case compared with experimental results of MARIN and numerical results of [36]; (a) the water height H1 in time, (b) the water height H2 in time, (c) the gauge pressure P1.](https://content.iospress.com:443/media/isp/2019/66-4/isp-66-4-isp200278/isp-66-isp200278-g023.jpg)
Two more simulations were run for two different grids,
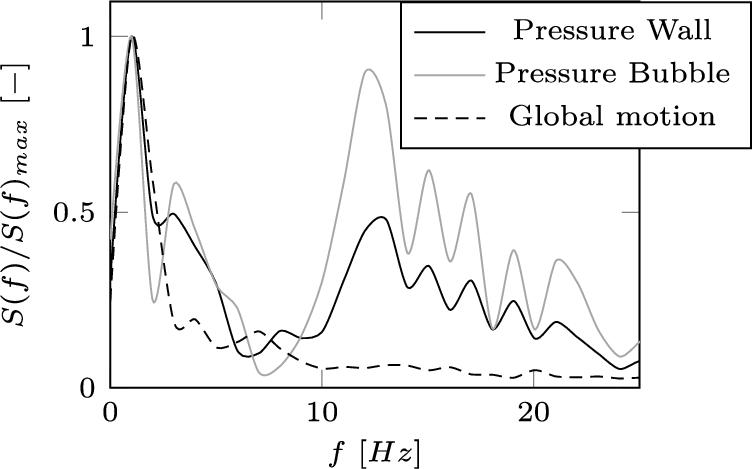
Special attention goes out to the pressure oscillations at
When averaging the pressure in the air pocket in space, a high frequency oscillation of 14.0 [Hz] is found. The same characteristic high frequency oscillation is found in the signal for pressure sensor
Fig. 24.
Normalized Fourier transform.
When using an equation for the natural frequency of cylindrical bubbles of this size [18]
Fig. 25.
Entrapment of air pocket (diameter 0.16 [m]) at 1.0 [s] (a), 1.4 [s] (b) and 1.6 [s] (c) with pressures in [Pa].
![Entrapment of air pocket (diameter 0.16 [m]) at 1.0 [s] (a), 1.4 [s] (b) and 1.6 [s] (c) with pressures in [Pa].](https://content.iospress.com:443/media/isp/2019/66-4/isp-66-4-isp200278/isp-66-isp200278-g025.jpg)
When the simulations were run without surface tension, the results were not any different. This means that compressibility and inertia govern the entrapped air pocket dynamics at this scale.
7.Conclusion
Our objective was to evaluate the effect of compressibility of air on the pressure exerted on an object during an impact with water. For this we extended the method of ComFLOW to obtain a complete model for representing the dynamics of air pockets entrapped after wave impact events. The extended implementation was verified by means of test cases relevant to the dynamics of entrapped air pockets. The extended method was validated by means of a dam-break experiment and applied to a dam-break in a new setting with a wall, in which the impact leads to an entrapped air pocket. The following conclusions were found:
PLIC does not lead to better results than SLIC for the grid resolutions used for the dam-break simulations in this article.
Gravity-consistent density averaging as in [36] does not improve the results with SLIC as it does with PLIC; cell-weighted averaging gives comparable results at lower computational cost. The combination of SLIC and cell-weighted averaging reduces the computational effort with a factor of 3 with respect to PLIC and gravity-consistent density averaging.
Our implementation compares well to test cases relevant to air pocket dynamics and compares well to dam-break experiments.
Our extended method compares well to the 3D dam-break experiment performed by MARIN until the air pocket is enclosed.
At the scale of the enclosed air pocket in our dam-break simulation (diameter 0.16 [m]), the effect of compression waves in the air dominates the dynamics.
The frequency of the pressure oscillations in the air pocket is of the same order as the analytical natural frequency of an adiabatic cylindrical bubble.
Acknowledgements
The authors would like to thank Arthur Veldman of the University of Groningen for allowing us to use ComFLOW to implement our work in.
References
[1] | T. Abadie, J. Aubin and D. Legendre, On the combined effects of surface tension force calculation and interface advection on spurious currents within volume of fluid and level set frameworks, Journal of Computational Physics 297: ((2015) ), 611–636. doi:10.1016/j.jcp.2015.04.054. |
[2] | A. Baraldi, M.S. Dodd and A. Ferrante, A mass-conserving volume-of-fluid method: Volume tracking and droplet surface-tension in incompressible isotropic turbulence, Computers & Fluids 96: ((2014) ), 322–337. doi:10.1016/j.compfluid.2013.12.018. |
[3] | R.W. Bos, J.H. Den Besten and M.L. Kaminski, A reduced order model for structural response of the Mark III LNG Cargo Containment System, International Shipbuilding Progress 4: ((2020) ), 41–56. |
[4] | J.U. Brackbill, D.B. Kothe and C. Zemach, A continuum method for modeling surface tension, Journal of Computational Physics 100: (2) ((1992) ), 335–354. doi:10.1016/0021-9991(92)90240-Y. |
[5] | H. Bredmose, D.H. Peregrine and G.N. Bullock, Violent breaking wave impacts. Part 2: Modelling the effect of air, Journal of Fluid Mechanics 641: ((2009) ), 389–430. doi:10.1017/S0022112009991571. |
[6] | B. Buchner, Green water from the side of a weathervaning FPSO, in: Proc. Conf. Offshore Mechanics and Arctic Engineering, St. John’s, (1999) . |
[7] | S.S. Deshpande, L. Anumolu and M.F. Trujillo, Evaluating the performance of the two-phase flow solver interFoam, Computational Science & Discovery 5: (1) ((2012) ), 014016. |
[8] | M.S. Dodd and A. Ferrante, A fast pressure-correction method for incompressible two-fluid flows, Journal of Computational Physics 273: ((2014) ), 416–434. doi:10.1016/j.jcp.2014.05.024. |
[9] | S. Dong and X. Wang, A rotational pressure-correction scheme for incompressible two-phase flows with open boundaries, PloS ONE 11: (5) ((2016) ), e0154565. |
[10] | S. Downes, A. Knott and I. Robinson, Towards a shock tube method for the dynamic calibration of pressure sensors, Phil. Trans. R. Soc. A 372: (2023) ((2014) ), 20130299. |
[11] | R.N. Elias and A.L.G.A. Coutinho, Stabilized edge-based finite element simulation of free-surface flows, International Journal for Numerical Methods in Fluids 54: (6–8) ((2007) ), 965–993. doi:10.1002/fld.1475. |
[12] | G. Fekken, A.E.P. Veldman and B. Buchner, Simulation of green-water loading using the Navier–Stokes equations, in: Proceedings 7th Intern. Conf. on Numerical Ship Hydrodynamics, Nantes, (1999) . |
[13] | M.M. Francois, S.J. Cummins, E.D. Dendy, D.B. Kothe, J.M. Sicilian and M.W. Williams, A balanced-force algorithm for continuous and sharp interfacial surface tension models within a volume tracking framework, Journal of Computational Physics 213: (1) ((2006) ), 141–173. doi:10.1016/j.jcp.2005.08.004. |
[14] | J. Gerrits, Dynamics of Liquid-Filled Spacecraft: Numerical Simulation of Coupled Solid–Liquid Dynamics, (2001) . |
[15] | F. Ham and Y.-N. Young, A Cartesian adaptive level set method for two-phase flows, Technical report, Center for Turbulence Research, 2003. |
[16] | D.J.E. Harvie, M.R. Davidson and M. Rudman, An analysis of parasitic current generation in volume of fluid simulations, Applied Mathematical Modelling 30: (10) ((2006) ), 1056–1066. doi:10.1016/j.apm.2005.08.015. |
[17] | S.-R. Hysing, S. Turek, D. Kuzmin, N. Parolini, E. Burman, S. Ganesan and L. Tobiska, Quantitative benchmark computations of two-dimensional bubble dynamics, International Journal for Numerical Methods in Fluids 60: (11) ((2009) ), 1259–1288. doi:10.1002/fld.1934. |
[18] | Y.A. Ilinskii, E.A. Zabolotskaya, T.A. Hay and M.F. Hamilton, Models of cylindrical bubble pulsation, The Journal of the Acoustical Society of America 132: (3) ((2012) ), 1346–1357. doi:10.1121/1.4730888. |
[19] | C.E. Kees, I. Akkerman, M.W. Farthing and Y. Bazilevs, A conservative level set method suitable for variable-order approximations and unstructured meshes, Journal of Computational Physics 230: (12) ((2011) ), 4536–4558. doi:10.1016/j.jcp.2011.02.030. |
[20] | K.M.T. Kleefsman, G. Fekken, A.E.P. Veldman, B. Iwanowski and B. Buchner, A volume-of-fluid based simulation method for wave impact problems, Journal of Computational Physics 206: (1) ((2005) ), 363–393. doi:10.1016/j.jcp.2004.12.007. |
[21] | S. Koshizuka, A particle method for incompressible viscous flow with fluid fragmentation, Comput. Fluid Dyn. J. 4: ((1995) ), 29–46. |
[22] | H. Lamb, Hydrodynamics, Cambridge University Press, (1932) . |
[23] | J.C. Martin, W.J. Moyce, A.T. Price and C.K. Thornhill, Part IV. An experimental study of the collapse of liquid columns on a rigid horizontal plane, Phil. Trans. R. Soc. Lond. A 244: (882) ((1952) ), 312–324. doi:10.1098/rsta.1952.0006. |
[24] | N. Mohd, M.M. Kamra, M. Sueyoshi and C. Hu, Three-dimensional free surface flows modeled by lattice Boltzmann method: A comparison with experimental data, Evergreen 4: ((2017) ), 29–35. |
[25] | A. Murrone and H. Guillard, A five equation reduced model for compressible two phase flow problems, Journal of Computational Physics 202: (2) ((2005) ), 664–698. doi:10.1016/j.jcp.2004.07.019. |
[26] | C. Obhrai, G. Bullock, G. Wolters, G. Müller, H. Peregrine, H. Bredmose and J. Grüne, Violent wave impacts on vertical and inclined walls: Large scale model tests, in: Coastal Engineering 2004 (in 4 volumes), World Scientific, (2005) , pp. 4075–4086. doi:10.1142/9789812701916_0329. |
[27] | L.R. Plumerault, Numerical modelling of aerated-water wave impacts on a coastal structure, PhD thesis, University of Pau and Pays de l’Adour, 2009. |
[28] | A. Prosperetti, Motion of two superposed viscous fluids, The Physics of Fluids 24: (7) ((1981) ), 1217–1223. doi:10.1063/1.863522. |
[29] | Y. Renardy and M. Renardy, PROST: A parabolic reconstruction of surface tension for the volume-of-fluid method, Journal of Computational Physics 183: (2) ((2002) ), 400–421. doi:10.1006/jcph.2002.7190. |
[30] | M. Rudman, A volume-tracking method for incompressible multifluid flows with large density variations, International Journal for Numerical Methods in Fluids 28: (2) ((1998) ), 357–378. doi:10.1002/(SICI)1097-0363(19980815)28:2<357::AID-FLD750>3.0.CO;2-D. |
[31] | C.K. Svihla and H. Xu, Simulation of free surface flows with surface tension with ANSYS CFX, in: 2006 International ANSYS Conference, Pittsburg, (2006) . |
[32] | T.M. Vestbøstad, Relative wave motion along the side of an FPSO hull, in: Proceedings of the 18th Conference on Offshore Mechanics and Arctic Engineering (OMAE’99), (1999) . |
[33] | G. Wang, S. Tang, Y. Shin et al., A direct calculation approach for designing a ship-shaped FPSOs bow against wave slamming load, in: The Twelfth International Offshore and Polar Engineering Conference, (2002) . |
[34] | P.R. Wellens, Wave simulation in truncated domains for offshore applications, PhD thesis, Delft University of Technology, 2012. |
[35] | R. Wemmenhove, Numerical simulation of two-phase flow in offshore environments, PhD thesis, University of Groningen, 2008. |
[36] | R. Wemmenhove, R. Luppes, A.E.P. Veldman and T. Bunnik, Numerical simulation of hydrodynamic wave loading by a compressible two-phase flow method, Computers & Fluids 114: ((2015) ), 218–231. doi:10.1016/j.compfluid.2015.03.007. |


