
Neuro-symbolic Predicate Invention: Learning relational concepts from visual scenes
Abstract
The predicates used for Inductive Logic Programming (ILP) systems are usually elusive and need to be hand-crafted in advance, which limits the generalization of the system when learning new rules without sufficient background knowledge. Predicate Invention (PI) for ILP is the problem of discovering new concepts that describe hidden relationships in the domain. PI can mitigate the generalization problem for ILP by inferring new concepts, giving the system a better vocabulary to compose logic rules. Although there are several PI approaches for symbolic ILP systems, PI for Neuro-Symbolic-ILP (NeSy-ILP) systems that can handle 3D visual inputs to learn logical rules using differentiable reasoning is still unaddressed. To this end, we propose a neuro-symbolic approach, NeSy-π, to invent predicates from visual scenes for NeSy-ILP systems based on clustering and extension of relational concepts, where π denotes the abbrivation of Predicate Invention. NeSy-π processes visual scenes as input using deep neural networks for the visual perception and invents new concepts that support the task of classifying complex visual scenes. The invented concepts can be used by any NeSy-ILP system instead of hand-crafted background knowledge. Our experiments show that the NeSy-π is capable of inventing high-level concepts and solving complex visual logic patterns efficiently and accurately in the absence of explicit background knowledge. Moreover, the invented concepts are explainable and interpretable, while also providing competitive results with state-of-the-art NeSy-ILP systems. (github: https://github.com/ml-research/NeSy-PI)
1.Introduction
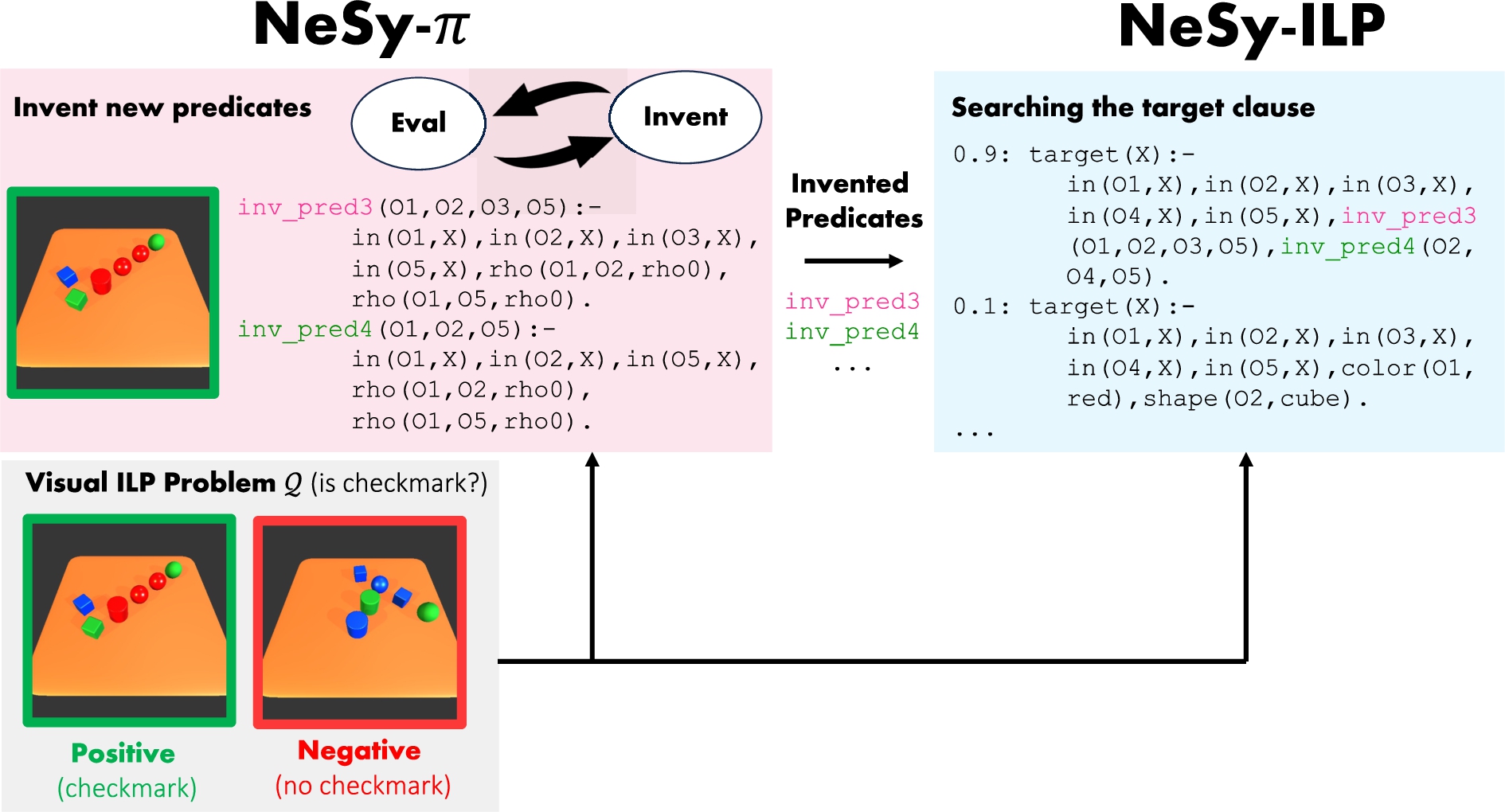
Inductive Logic Programming (ILP) learns generalized logic programs from data [3,24,26]. Unlike Deep Neural Networks (DNNs), ILP gains vital benefits, including the capacity to discover explanatory rules from a small number of examples. Nevertheless, predicates for ILP systems are typically elusive and need to be hand-crafted, requiring additional prior knowledge to compose solutions. This makes the wide-scale adaption of such systems difficult and taxing. Predicate invention (PI) systems invent new predicates that map new concepts from expert-designed primitive predicates. This extends the expression of the ILP language and consequently decreases reliance on human experts [23]. A simple example is the concept of the blue sphere, which is the combination of two primitive concepts blue and sphere. Consider the visual scenes illustrated in Fig. 1, where we see several objects in the scene, and the task is to reason and learn about objects’ attributes and their relations. With PI systems, the non-primitive concepts (e.g. blue sphere) are not explained in the background knowledge, but have to be learned from data. For instance, given training data, a PI system can invent new predicate
Fig. 1.
NeSy-π discovers relational concepts from visual scenes. NeSy-π develops relational concepts for visual scenes through iterative evaluation and invention of primitive predicates and visual scenes (on the left). The invented predicates are fed into a NeSy-ILP solver to learn classification rules. The NeSy-ILP solver creates rule candidates utilizing given predicates and performs differentiable reasoning and learning (on the right). Consequently, the classification rules can be effectively constructed with the invented predicates (best viewed in color).
Recently, a differentiable ILP framework has been proposed to integrate symbolic ILP with DNNs [10] solving rule-learning tasks on symbolic or simple visual inputs, e.g. hand-written images. In a similar vein, neuro-symbolic ILP (NeSy-ILP) systems 11 that can learn explanatory rules on complex visual scenes (e.g. CLEVR scenes [13]) have shown their capability to reason and learn on abstract concepts and relations solving complex visual patterns [30]. NeSy-ILP systems outperform pure neural baselines on complex visual reasoning, since it involves inferring answers by reasoning about objects’ attributes and their relations [21]. The main drawback of the current NeSy-ILP systems is that they necessitate all predicates in advance, such as pre-trained neural predicates or manually constructed background knowledge. In addition, obtaining background knowledge is expensive as it requires human experts or the pre-training of neural modules with supplementary supervision. Consequently, this significantly restricts the flexibility of the NeSy-ILP systems across various domains. Therefore, a question arises: How can a NeSy-ILP system learn with less or no background knowledge in complex visual scenes?
To address this problem, we introduce Neuro-Symbolic Predicate Invention (NeSy-π), which can invent relational concepts from visual scenes without additional supervision or hard coding. NeSy-π provides a rich vocabulary for NeSy-ILP systems to produce effective solutions on 3D visual scenes. A briefly applying case is illustrated in Fig. 1. Given positive and negative examples as visual scenes, NeSy-π performs PI finding useful relational concepts, e.g. grouping several objects and capturing their spatial relations to compose complex patterns. Given primitive predicates, NeSy-π performs the following 2 steps iteratively: (Step 1: Eval) evaluating available predicates invented in the previous steps, and (Step 2: Invent) inventing new predicates based on the evaluation scores. Additionally, we propose three novel metrics to evaluate invented predicates resulting in pruning of the redundant candidates efficiently and gain high-quality vocabulary. The invented predicates can then be fed to NeSy-ILP systems to learn explanatory classification rules.
Overall, we make the following important contributions:
1. We propose NeSy-π, a novel neuro-symbolic predicate invention framework compatible with NeSy-ILP systems. It extends NeSy-ILP systems by providing the capability of learning vocabularies from 3D visual scenes. NeSy-π enables them to learn using less background knowledge from human experts, mitigating the scaling bottleneck of the current NeSy-ILP systems.
2. To evaluate NeSy-π, we propose three metrics. These metrics measure the percentage of examples covered or eliminated by the predicates, enabling NeSy-π to efficiently discovers useful concepts.
3. To evaluate the ability of predicate invention using visual inputs, we propose 3D Kandinsky Patterns, extending Kandinsky Patterns [25] to the 3D world. The Kandinsky Patterns environment can generate positive and negative visual scenes using different abstract patterns. However, it has been limited to simple 2D images, and predicate invention has not been addressed. Thus we propose the first environment for the evaluation of neuro-symbolic predicate invention systems that can process complex visual scenes, filling the gap between the abstract synthetic tasks and realistic 3D environments.
4. We empirically show that NeSy-π solves challenging visual reasoning tasks outperforming the conventional NeSy-ILP systems without predicate invention. In our experiments, we successfully applied NeSy-π to 3D Kandinsky Patterns to invent new predicates for complex scenes, achieving higher performances than baselines. Moreover, NeSy-π produces highly-interpretable rules using invented predicates, which cannot be learned by the previous systems.
We have made our code publicly available at https://github.com/ml-research/NeSy-PI. We proceed as follows: we present the required background knowledge before introducing our NeSy-π architecture. We then illustrate the effectiveness of our approach using extensive experiments. Finally, we discuss the related work before concluding.
2.First-order logic and Inductive Logic Programming
Before introducing NeSy-π, we revisit the basic concepts of first-order logic and Inductive Logic Programming First-Order Logic (FOL). A Language
Inductive Logic Programming (ILP). An ILP problem
NeSy Inductive Logic Programming. We address the problem of Neuro-Symbolic Inductive Logic Programming (NeSy-ILP) presented in 3D visual scenes, which we refer to as the “Visual ILP Problem”. The classification pattern is based on high-level concepts encompassing attributes and object relations. To solve visual ILP problems, differentiable ILP frameworks have been proposed such as ∂ILP [10] and αILP [30]. They employ a differentiable implementation of forward reasoning in first-order logic(FOL) to enable gradient-based learning of the classification rules. The optimization problem they solve to this end is
3.Neuro-symbolic predicate invention: NeSy-π
In this section, we present the predicate invention system NeSy-π in the following steps: Section 3.1 is an overview of the system. Section 3.2 explains the clause extension, where the extended clauses are one of the inputs of the NeSy-π system. Section 3.3 explains the clause evaluation, which employs two metric proposed in this paper. The scores assigned to the clauses form the other input of the NeSy-π system. Section 3.4 presents the predicate invention and its evaluation. Section 3.5 presents the grouping module, a data prepossessing module that combines related objects into groups to simplify the problem. Section 3.6 provides the pseudo code for the system.
3.1.Architecture overview
The NeSy-π is a neuro-symbolic system to invent high-level relational concepts as predicates. The invented predicates are further be used by NeSy-ILP system for target clause searching. The workflow of solving visual ILP problem using the NeSy-π system is illustrated in Fig. 2. The process is divided into two major components: the training and the evaluation. Training utilizes the training examples
Fig. 2.
Workflow of visual scene reasoning (train, left) during the training phase, NeSy-π learns a set of rules
![Workflow of visual scene reasoning (train, left) during the training phase, NeSy-π learns a set of rules C to describe common patterns within the given RGB-D images. This process involves using four models: a pretrained perception module (e.g. Mask R-CNN [11]) for object detection; a grouping module (GM) that fits objects to lines base on their 3D positions; NeSy-ILP as a rule learner; NeSy-π as a concept inventor. GM groups objects together (e.g. a group of objects aligned on a line) to form complex spatial relations (e.g. a check mark). (Evaluate, right) in the evaluation phase, given a test RGB-D image, the system predicts whether the image follows the set of rules C (positive) or not (negative). The GM and perception module are used for image processing, while a differentiable forward reasoner is employed for reasoning purposes.](https://content.iospress.com:443/media/nai-prepress/nai--1--1-nai240712/nai--1-nai240712-g002.jpg)
As a prepossessing step, we prepared a dataset for training a perception module, such as Mask R-CNN [11]. The dataset for perception module is similar as training examples in
Once the perception module is trained, the four modules, perception module, grouping module, NeSy-ILP, and NeSy-π perform an end-to-end training, which takes training examples
During evaluation, the system classifies the test scenes as either positive or negative. Positive scenes satisfy the target clauses while negative scenes do not. The perception and grouping module first interpret the data into group tensors, just as during training. Then, a differentiable forward reasoner is used to classify the group tensors as positive or negative based on the target clauses
3.2.Clause extension
We take the top-down approach for ILP, where new clauses are generated by specifying general rules [26]. We extend clauses step by step by evaluating on visual scenes to prune redundant candidates. NeSy-π begins with the most general clause for the search, e.g. the initial clause

where the atom
The clauses set is extended incrementally, starting with the extension of

The clauses in
3.3.Clause evaluation
We now describe the clause evaluation strategy in NeSy-π and three novel metrics to evaluate clauses efficiently for predicate invention. Given the generated clauses (described in Section 3.2), NeSy-π scores each of them using positive and negative examples
–
–
–
–
We introduce metric P-Measure, which is used to evaluate the performance of the clause on positive examples. The target clause has to be valid in all positive examples, thus the more positive examples that a clause satisfies, the better the clause is. On the contrary, the less positive examples that a clause satisfies, the worse it is.
P-measure The P-Measure assesses the validation of clause on positive examples, with
Similarly, we introduce metric N-Measure, which is used to evaluate the performance of the clause on negative examples. The target clause has to be invalid in all negative examples, thus the less negative examples that a clause does not satisfy, the better the clause is. On the contrary, the more negative examples that a clause satisfy, the worse the clause is.
N-measure The N-Measure evaluates the validation of clauses on negative examples. Given a clause C, its N-Measure is denoted as
If none of the negative examples satisfy C, the N-Measure of C is equal to 1. Assuming the examples are either positive or negative, if there is an example e that satisfies C, then d is a positive examples. The clause C is called a sufficient condition for the positive examples, which follows the implicational relationship
If all the positive examples are satisfied by C, and no negative examples satisfy C, then C meets the definition of the target clause. In this scenario, both the P-Measure and N-Measure of C are 1, and C is a sufficient and necessary condition of the positive examples. This follows the implicational relationship:
However, the majority of the clauses yield P and N measure scores between 0 and 1, i.e. they satisfy neither necessary nor sufficient condition. Since the sufficient and necessary condition is satisfied by
PN-measure The PN-Measure evaluates a clause meeting the definition of the target clause. Given a clause C, its PN-Measure is denoted as
3.4.Predicate invention
NeSy-π invents new predicates by using the extended clauses
Definition 1
Definition 1(Invented Predicate).
Given a set of clauses
For example, assume

A predicate

The invented predicate
The key of predicate invention in NeSy-π is to identify the explanation clause set, which is a subset of the clause set
Now we move on evaluating the newly invented predicates. Invented predicates can be evaluated using the P-Measure and N-Measure metrics as introduced in Section 3.3. Let p be an invented predicate,
P-measure on invented predicate The P-Measure of invented predicate candidate p is utilized to evaluate the validation of an invented predicate on positive examples. The validity of predicate p increases as more positive examples are verified to hold true on it. The invented predicate is defined as the disjunction of the corresponding explanation clause set
N-measure on invented predicate The N-Measure is utilized to access the validation of an invented predicate on negative examples. The fewer the number of the negative examples in which the invented predicate holds true, the stronger its performance. The invented predicate is defined by the disjunction of the associated explanation clause set
PN-measure on invented predicate The PN-Measure assesses the performance of the predicate on both positive and negative examples in a quantified, objective way. This measure is derived by calculating the product of the P-Measure and the N-Measure. The formula for the PN-Measure can be written as follows:
In NeSy-ILP systems, target clauses are extended by searching for atoms within the given language. This search relies on the assumption that all the necessary atoms are present in the given language. In contrast, NeSy-π does not require such an assumption. If necessary atoms are absent from the language, the system can invent new predicates and generate new atoms.
For instance, let us consider scenes with only two colors red and blue and two shapes sphere and cube. The pattern

The predicate
Listing 1.
Background knowledge of concept

Listing 2.
Predicates invented by NeSy-π that relate to concept


The predicate
3.5.Object grouping
In a scene with numerous objects, it is often unnecessary to consider every relationship. For instance, if there are three objects on a table, it is reasonable to query whether any two of them have the same color or same shape. However, if there are 20 objects on the table, it is not necessary to investigate whether any two of them share a property. It would be more expedient to initially consider conditions such as whether more than half or all of the objects share a property. In order to gain a comprehensive understanding of an image, it is advisable to begin by accessing it at a global level, rather than delving into its particulars right away.
For complex patterns that comprise a multitude of objects, NeSy-π utilizes an object Grouping Module (GM) that can recognise line patterns in a more efficient and organised manner. The grouping module employs the position characteristics of each object to group them accordingly. It is essential to view multiple objects as a single entity in complex scenes since the number of object relationships increases at a factorial rate, specifically
Five steps are required to convert an image example to group tensors
Fig. 3.
Grouping module. The grouping module takes an image as input and produces the group tensors
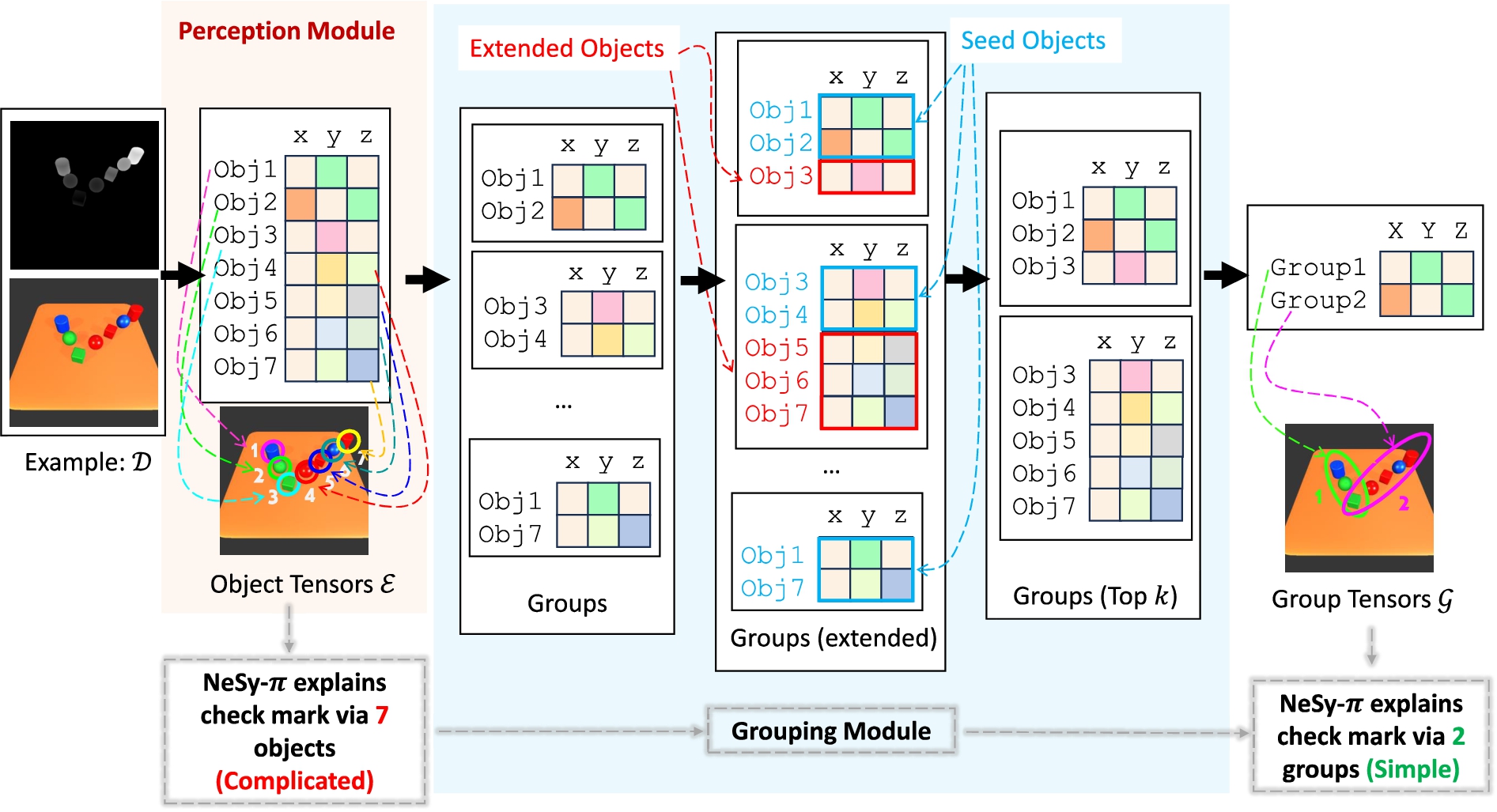
Object perception In the first step, the grouping module detects the object labels
Group generation NeSy-π proposes an approach to gather objects into line groups based on their 3D positions. The strategy is to first generate small groups and then expand them to the maximum size. Since two points define a line, a small group is generated by two objects. The object positions can also be used to determine the corresponding line function. For N objects,
Group extension The groups are further extended based on their line functions. For each small group, the remaining
Group evaluation Since the motivation of grouping module is to decrease the relations between objects, it is important to minimize the number of groups. After the group generation,
Group encoding Finally, the groups are encoded as tensors
The group module is an optional module of NeSy-π. It is used for scenes with potential group structures, like lines in this given example. By generating rules at group level, the logical structures between objects can be expressed much more clearly and easily. The invented predicates are also invented at the group level.
Algorithm 1
Predicate invention on visual scenes using NeSy-ILP and NeSy-π
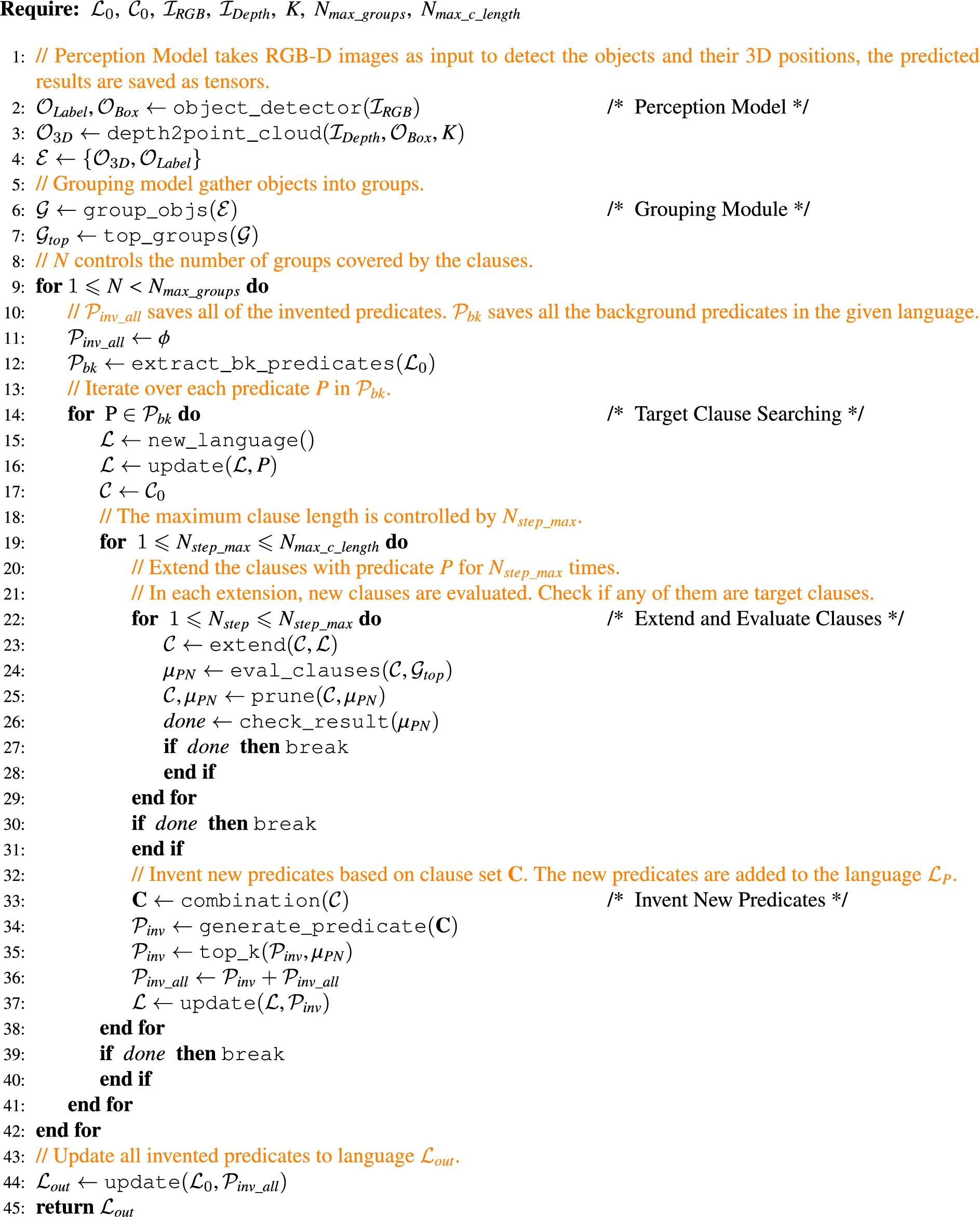
3.6.NeSy-π algorithm
Algorithm 1 provides the pseudo code of the process of predicate invention utilizing the NeSy-ILP and NeSy-π systems. The NeSy-π system focuses on extending the initial language
The algorithm includes a grouping module as discussed in Section 3.2–3.5. The initial language
(Line 1–4) Produce object tensors
4.Experimental evaluation
NeSy-π aims to aid NeSy-ILP systems such as αILP [30] in tackling visual reasoning tasks. Frequently used evaluation datasets are the 2D dataset Kandinsky Patterns [25], and the 3D dataset CLEVR-Hans [34], which is a variant of CLEVR [13]. Both datasets utilize geometry objects to represent fundamental concepts of common sense. In this paper, we propose three datasets for evaluating NeSy-π, which follow the similar dataset configuration with αILP [30]. The calibrated RGB-D camera captures all the scenes. The RGB images serve as input for the perception module. The system locates the 3D positions of the objects relative to the camera coordinate system using the corresponding depth maps and camera matrix.
4.1.Datasets
The datasets comprise synthetic images generated using the Unity game engine [35]. In every image, objects are positioned on a table and captured by a calibrated RGB-D camera. A scene in the dataset refers to an image captured by the camera. Every scene is made up of basic objects that represent logical concepts. The object categories comprise of three types: sphere, cube, and cylinder; the objects come in three colors: red, green, and blue. The size and surface texture of the objects remain consistent across all scenes. A pattern refers to a set of scenes consisting of both positive scenes and negative scenes. All of the positive scenes follow a common logical concept, while none of the negative scenes do. To examine the predicate invention performance of the NeSy-π, every pattern in the dataset is accompanied by at least one new concept not included in the initial language.
Fig. 4.
Simple Kandinsky Patterns. These patterns are designed with only a few objects. Each pattern refers to a logical concept, as indicated by the name, which is not explained by background knowledge. Close: two objects are close to each other. Diagonal: two objects are diagonally located. Same: three objects have the same shape and the same color. Two Pairs: two pairs of objects are in the scene. A pair is defined by two objects with the same color and shape.
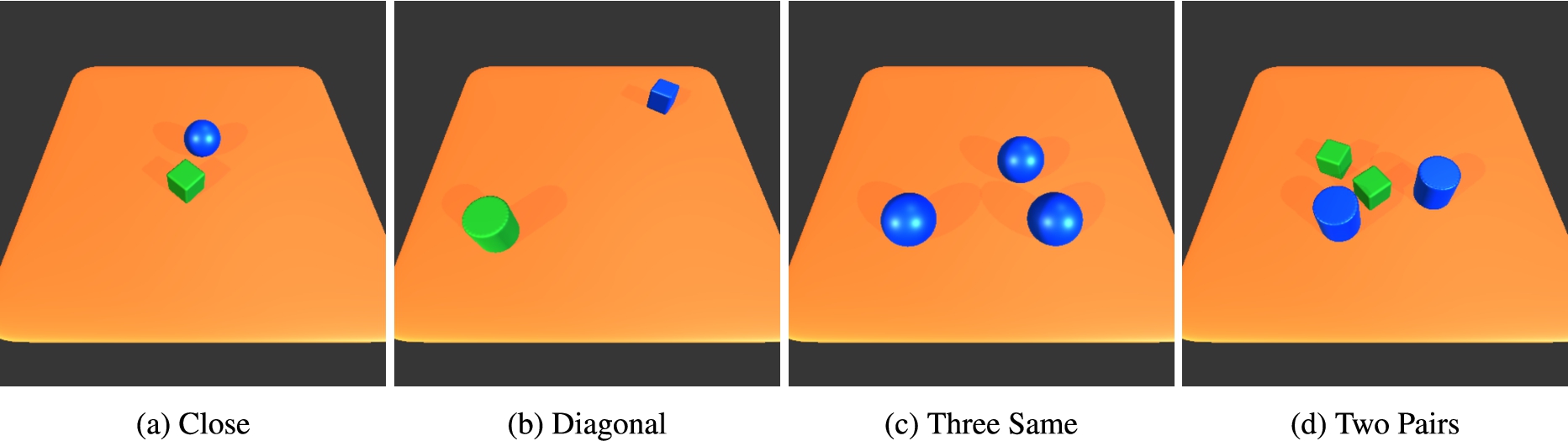
Simple Kandinsky Patterns This dataset represents four logical patterns, as shown in Fig. 4. The patterns comprises a maximum of four objects. In each pattern, several objects are placed on the table. The details of each pattern is introduced as follows:
(Close) | In positive scenes, two objects are located close to each other. The maximum distance between two objects is one-seventh of the table’s width. Negative scenes are two objects that are far apart, with a minimum distance between them of half of the table’s width. |
(Diagonal) | Positive scenes require two objects to be positioned diagonally from each other, while negative scenes involve two objects being positioned horizontally. |
(Three Same) | Three objects appear in scenes, positive scenes require that all objects possess the same color and shape. Negative scenes, however, involve three objects that have at least two differences in color or shape. |
(Two Pairs) | In scenes with two pairs of objects, positive scenes require that each pair share the same color and shape. Negative scenes require at most one pair that shares the same color and shape. |
Fig. 5.
Complex Kandinsky Patterns. These patterns are designed with at least five objects in the scenes. These objects form 2D shapes by their position. Check Mark: several objects form the shape of check mark. Parallel: multiple objects are arranged in two parallel rows. Perpendicular: multiple objects are arranged in two perpendicular rows. Square: several objects are arranged in the shape of a square.
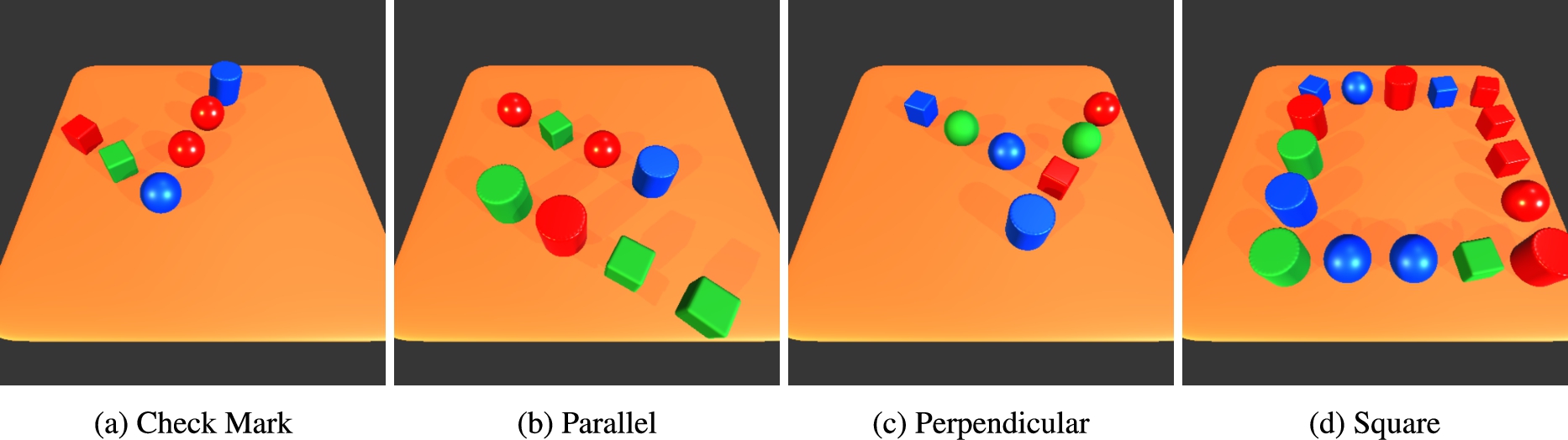
Complex Kandinsky Patterns This dataset uses objects to represent four logical patterns, as shown in Fig. 5. Compared to the simple Kandinsky patterns, the complex Kandinsky patterns consists of a considerately larger number of objects and relations among objects. The objects are ordered according to certain spatial rules, such as perpendicular, parallel and so on. The details of each pattern is introduced as follows:
(Check Mark) | In positive scenes, five to seven objects form a check mark shape. The direction of the check mark is rotated in range 0 to 45 degrees in each scene. In negative scenes, five to eight objects form two intersecting lines, with the intersection point never being an endpoint of both lines simultaneously. |
(Parallel) | Positive scenes consists of six to eight objects arranged in two parallel rows. Negative scenes consist of six to eight objects arranged in two rows with an angle between them ranging from 20 to 80 degrees. |
(Perpendicular) | In positive scenes, six to eight objects are arranged in two perpendicular rows. Negative scenes consist of six to eight objects arranged in two rows with angle between them ranging from 20 to 80 degrees. |
(Square) | In positive scenes, several objects form the shape of a square, with consistent spacing between adjacent objects on each edge. The square size in each scene range from 3, 4, or 5 objects per edge. In negative scenes, the objects are arranged in the shape of a rectangle, with a consistent spacing between adjacent objects on each edge. The longer side of the rectangle consists of 5 objects, while the shorter side consists of 3 objects. The rectangle is located either horizontally or vertically. |
Fig. 6.
Latin Alphabet Patterns. Latin letters (including upper and lower case) consisting of multiple objects. The shape of the individual letters consists mainly of lines. For more examples, see appendix B.
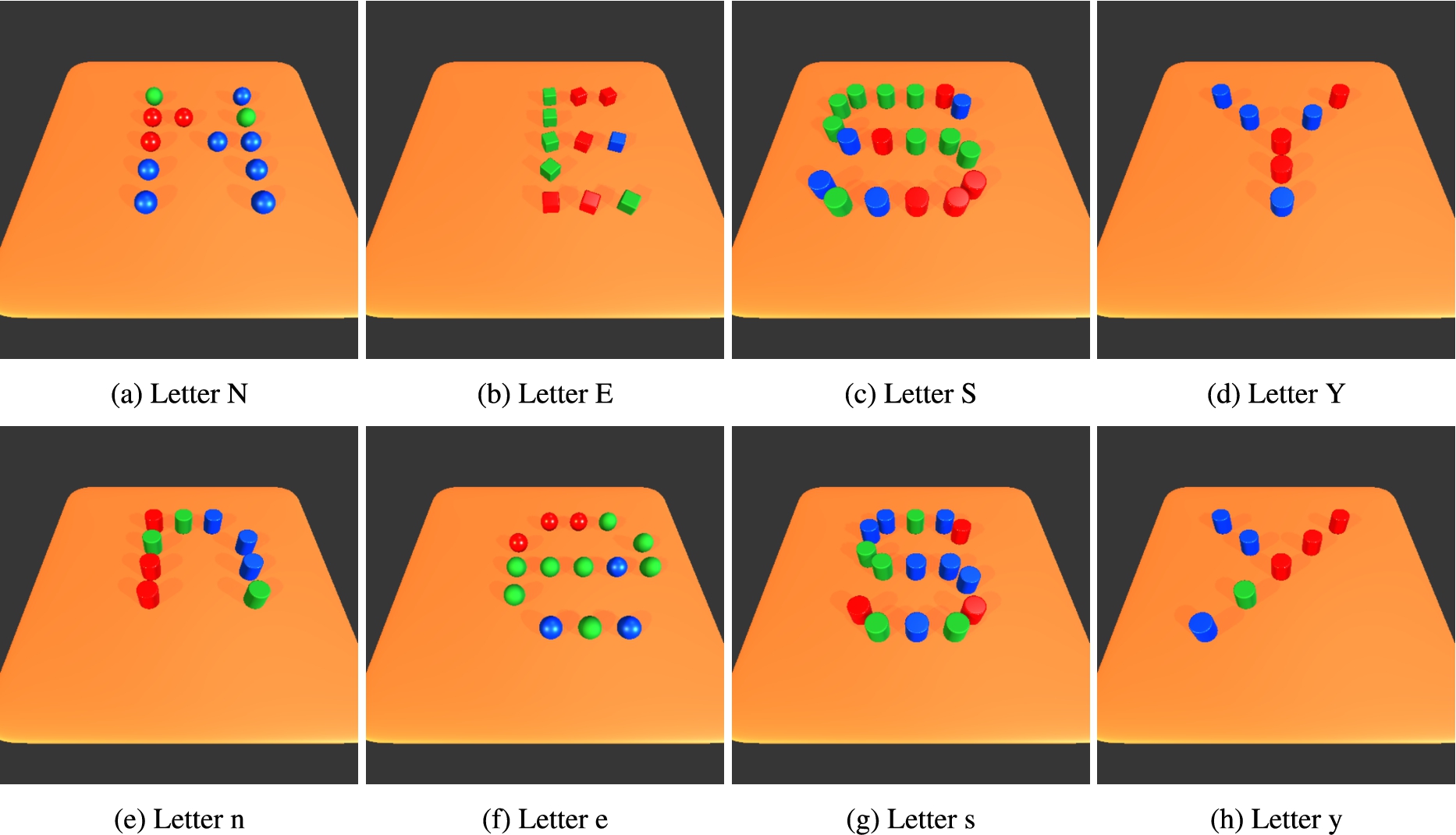
Latin Alphabet Patterns This dataset uses objects representing 26 Latin letters. Figure 6 shows some examples of the letter patterns. A complete version is shown in the Appendix B. These patterns are composed of line-based elements. In each pattern, a set of objects is placed on a table and forms the shape of a letter in the Latin alphabet. In order to introduce more variations for each pattern, letter cases (upper case and lower case) are considered, i.e. each pattern has two variations. The colors and shapes of the objects are changed randomly in each scene. The center position of all objects is also shifted slightly in each scene. The dataset of each pattern consists of the same number of positive and negative scenes. The positive scenes are created based on the two variations of that pattern, and the negative scenes are created based on the variations of all the other patterns.
4.2.Evaluation results
The experiments aim to answer the following questions:
Q1. Can NeSy-π invent useful predicates from visual scenes improving the performance of NeSy-ILP systems?
Q2. Can NeSy-π solve complex patterns that cannot be solved by the state-of-the-art NeSy-ILP baseline?
Q3. Is NeSy-π computationally efficient?
Q4. Is NeSy-π robust to unseen falsifying examples?
A1 (NeSy-π effectiveness): The background predicates utilized for solving the patterns in this work are listed in Table 1. All predicates invented by NeSy-π are based on these predicates. Moreover, no other predicates or background clauses are provided for the reasoning process. In αILP [30], certain concepts such as
Table 1
Background predicates for solving logical patterns
| Predicate | Description |
| Evaluate whether the object/group | |
| Evaluate whether the object/group | |
| Evaluate if the object | |
| Evaluate whether the direction of object/group | |
| Evaluate whether the distance between the object | |
| Evaluate whether the slope of object group |
Figure 7 shows an example of the learning result for the simple Kandinsky pattern close. The target clause is searched by αILP, and the used predicate
Table 2 shows the evaluation result of all simple Kandinsky patterns based on the proposed metrics in Section 3.3. NeSy-π has successfully invented new predicates and found the promising target clauses for all simple patterns, resulting in PN-Measure values over
Fig. 7.
Pattern Close. The logic of the pattern is that two objects are close to each other. Left: two positive (green border) and two negative (red border) examples of the pattern Close. Right: learned target clauses and the corresponding invented predicates of the pattern Close. The distance precision parameter
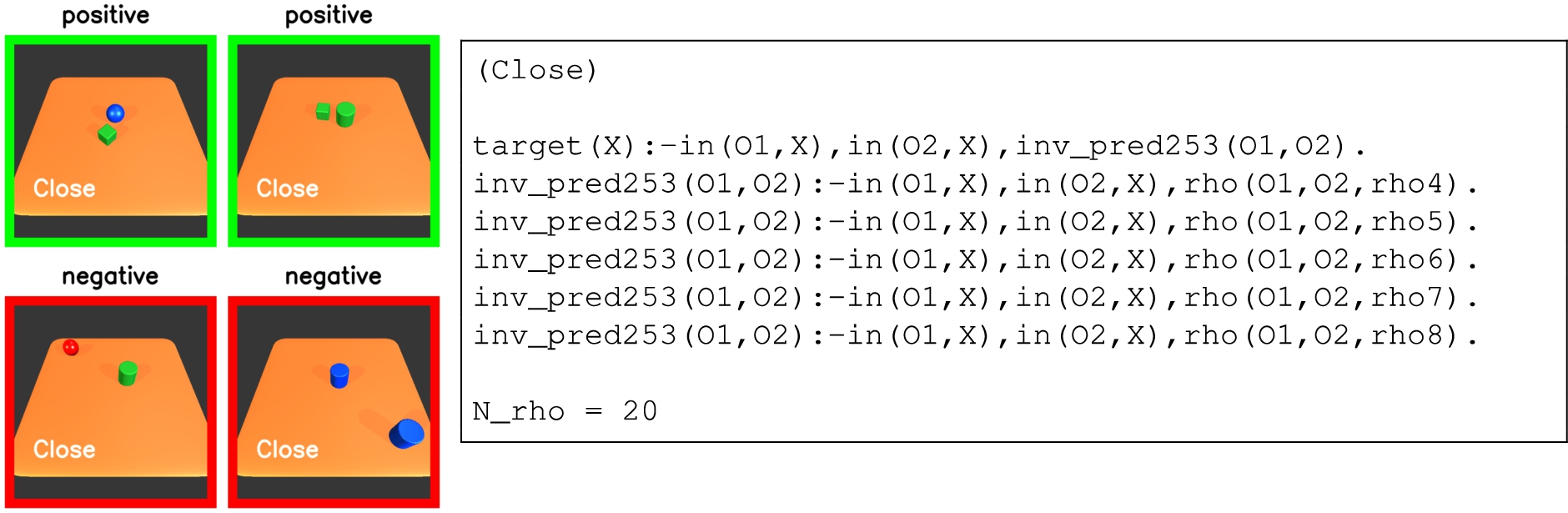
Table 2
Learning result on Simple Kandinsky Patterns. α is the baseline approach based on αILP [30], π is the proposed approach using αILP with NeSy-π, Δ is the improvement in percentage calculated as
| Pattern | #Object | #Image | P-Measure | N-Measure | PN-Measure | #Inv_Pred | ||||||
| α | π | Δ | α | π | Δ | α | π | Δ | ||||
| Close | 2 | 100 | 0.43 | 1.00 | 132.56% | 1.00 | 0.91 | −9.00% | 0.43 | 0.91 | 111.63% | 1 |
| Diagonal | 2 | 100 | 0.87 | 1.00 | 14.94% | 1.00 | 1.00 | 0.00% | 0.87 | 1.00 | 14.94% | 1 |
| Same | 3 | 100 | 0.50 | 0.92 | 84.00% | 0.67 | 1.00 | 49.25% | 0.34 | 0.92 | 170.59% | 2 |
| Two Pairs | 4 | 100 | 0.64 | 0.96 | 50.00% | 0.68 | 1.00 | 47.06% | 0.44 | 0.96 | 118.18% | 2 |
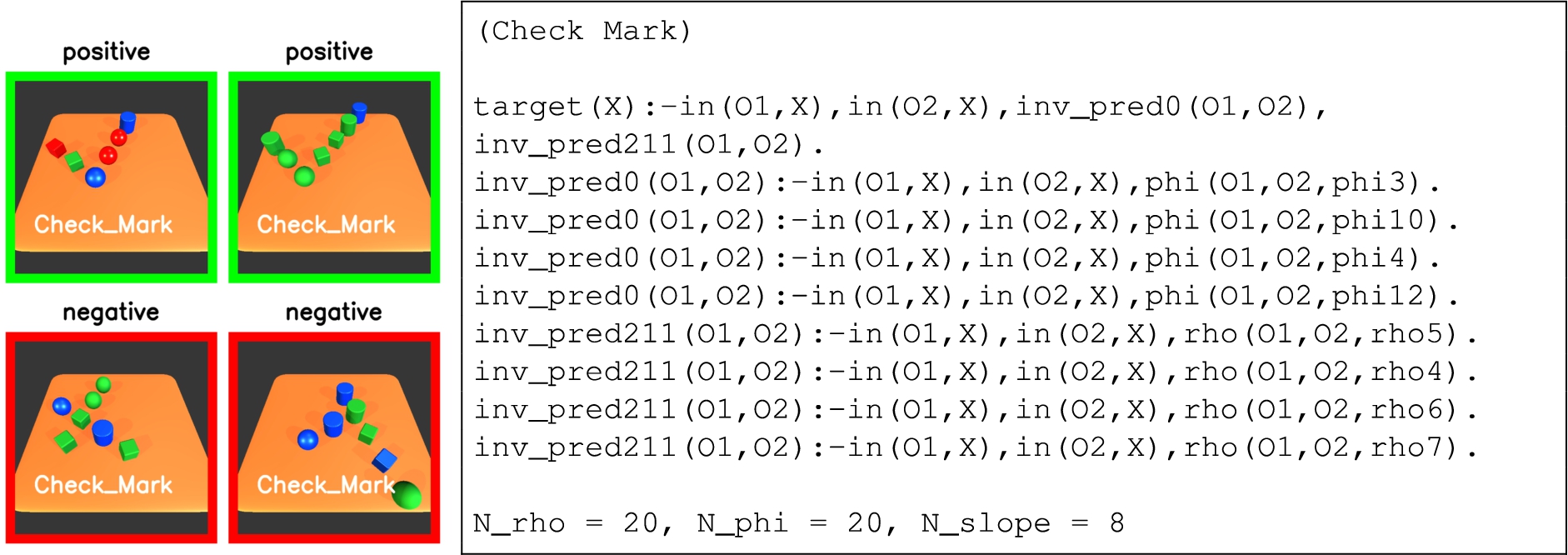
Fig. 8.
Pattern Check Mark. The logic of the pattern is that several objects form a shape of check mark. The number of objects on the right side of check mark changes randomly from 3 to 5 in each scene. Left: two positive (green border) and two negative (red border) examples of pattern Check Mark. Right: learned target clauses and the corresponding invented predicates of the pattern Check Mark. The predicate
A2 (Complex Patterns): For the complex Kandinsky patterns, NeSy-π uses the Grouping Module to gather the objects into groups. The predicates are invented on the group level. In the experiment, the maximum group number of the grouping module, i.e. the parameter N in Algorithm 1, is given as 5. The dataset Complex Kandinsky Patterns uses objects representing basic line relations and other basic geometry shapes. The given background knowledge is the given predicates shown in Table 1, and the line grouping module explained in Section 3.5.
Figure 8 lists the learned target clauses and the corresponding invented predicates of the pattern check mark. The target clause is described by 2 invented predicates. The used invented predicate
Furthermore, we have also analyzed the more intricate dataset Alphabet Patterns, which consists of 5 to 20 objects. The learning result of certain letters on NeSy-π with αILP systems are shown in appendix B. Table 4 illustrates the best learning result of each patterns on two systems. NeSy-π shows an average PN-Measure score of 0.911, exhibiting a
Table 3
Learning result on Complex Kandinsky Patterns. α is the baseline approach based on αILP [30], π is the proposed approach using αILP with NeSy-π, Δ is the improvement in percentage calculated as
| Pattern | #Object | #Image | P-Measure | N-Measure | PN-Measure | #Inv_Pred | ||||||
| α | π | Δ | α | π | Δ | α | π | Δ | ||||
| Check Mark | 5–6 | 100 | 0.66 | 0.93 | 40.91% | 0.90 | 0.99 | 10.00% | 0.59 | 0.92 | 55.93% | 2 |
| Parallel | 6–8 | 100 | 0.33 | 0.93 | 181.82% | 1.00 | 1.00 | 0.00% | 0.33 | 0.93 | 181.82% | 1 |
| Perpendicular | 6–8 | 100 | 0.63 | 0.92 | 46.03% | 0.88 | 1.00 | 13.64% | 0.55 | 0.92 | 67.27% | 2 |
| Square | 8–16 | 100 | 0.50 | 0.83 | 66.00% | 0.72 | 1.00 | 38.89% | 0.36 | 0.83 | 130.56% | 1 |
Table 4
Learning result of NeSy-π on Latin Alphabet Patterns. α is the base-line approach based on αILP [30], π is the proposed approach using αILP with NeSy-π, Δ is the improvement in percentage calculated as
| Pattern | #Object | #Image | P-Measure | N-Measure | PN-Measure | #Inv_Pred | ||||||
| α | π | Δ | α | π | Δ | α | π | Δ | ||||
| Letter A | 14 | 100 | 0.92 | 0.86 | −6.52% | 0.85 | 0.96 | 12.94% | 0.78 | 0.83 | 5.58% | 1 |
| Letter B | 13–20 | 100 | 0.93 | 0.93 | 0.00% | 1.00 | 1.00 | 0.00% | 0.93 | 0.93 | 0.00% | 0 |
| Letter C | 9–12 | 100 | 0.96 | 0.96 | 0.00% | 1.00 | 0.99 | −1.00% | 0.96 | 0.95 | −1.00% | 3 |
| Letter D | 13–14 | 100 | 0.95 | 0.95 | 0.00% | 0.98 | 1.00 | 2.04% | 0.93 | 0.95 | 2.04% | 2 |
| Letter E | 11–14 | 100 | 0.96 | 0.96 | 0.00% | 1.00 | 1.00 | 0.00% | 0.96 | 0.96 | 0.00% | 1 |
| Letter F | 9–10 | 100 | 0.96 | 0.88 | −8.33% | 0.79 | 0.95 | 20.25% | 0.76 | 0.84 | 10.23% | 1 |
| Letter G | 16–18 | 100 | 0.96 | 0.96 | 0.00% | 0.86 | 0.98 | 13.95% | 0.83 | 0.94 | 13.95% | 1 |
| Letter H | 11–12 | 100 | 0.96 | 0.91 | −5.21% | 0.93 | 1.00 | 7.53% | 0.89 | 0.91 | 1.93% | 1 |
| Letter I | 9 | 100 | 0.76 | 0.93 | 22.37% | 0.94 | 0.94 | 0.00% | 0.71 | 0.87 | 22.37% | 1 |
| Letter J | 11 | 100 | 0.96 | 0.93 | −3.13% | 0.91 | 0.99 | 8.79% | 0.87 | 0.92 | 5.39% | 2 |
| Letter K | 11–14 | 100 | 0.90 | 0.94 | 4.44% | 1.00 | 1.00 | 0.00% | 0.90 | 0.94 | 4.44% | 2 |
| Letter L | 7–8 | 100 | 0.71 | 0.96 | 35.21% | 0.96 | 0.94 | −2.08% | 0.68 | 0.90 | 32.39% | 2 |
| Letter M | 11–13 | 100 | 0.78 | 0.90 | 15.38% | 0.86 | 0.97 | 12.79% | 0.67 | 0.87 | 30.14% | 1 |
| Letter N | 9–12 | 100 | 0.96 | 0.96 | 0.00% | 0.98 | 0.98 | 0.00% | 0.94 | 0.94 | 0.00% | 3 |
| Letter O | 12–16 | 100 | 0.94 | 0.95 | 1.06% | 1.00 | 1.00 | 0.00% | 0.94 | 0.95 | 1.06% | 1 |
| Letter P | 14–15 | 100 | 0.93 | 0.94 | 1.08% | 1.00 | 1.00 | 0.00% | 0.93 | 0.94 | 1.08% | 3 |
| Letter Q | 15 | 100 | 0.98 | 0.98 | 0.00% | 1.00 | 1.00 | 0.00% | 0.98 | 0.98 | 0.00% | 2 |
| Letter R | 8–18 | 100 | 0.88 | 0.90 | 2.27% | 0.79 | 0.99 | 25.32% | 0.70 | 0.89 | 28.16% | 3 |
| Letter S | 15–18 | 100 | 0.96 | 0.95 | −1.04% | 0.99 | 1.00 | 1.01% | 0.95 | 0.95 | 0.00% | 2 |
| Letter T | 9 | 100 | 0.96 | 0.96 | 0.00% | 0.97 | 1.00 | 3.09% | 0.93 | 0.96 | 3.09% | 2 |
| Letter U | 11–13 | 100 | 0.95 | 0.95 | 0.00% | 0.95 | 1.00 | 5.26% | 0.90 | 0.95 | 5.26% | 3 |
| Letter V | 5–9 | 100 | 0.96 | 0.96 | 0.00% | 0.98 | 1.00 | 2.04% | 0.94 | 0.96 | 2.04% | 1 |
| Letter W | 9–13 | 100 | 0.95 | 0.95 | 0.00% | 0.83 | 0.97 | 16.87% | 0.79 | 0.92 | 16.87% | 2 |
| Letter X | 5–9 | 100 | 0.96 | 0.96 | 0.00% | 1.00 | 1.00 | 0.00% | 0.96 | 0.96 | 0.00% | 1 |
| Letter Y | 7 | 100 | 0.88 | 1.00 | 13.64% | 1.00 | 1.00 | 0.00% | 0.88 | 1.00 | 13.64% | 2 |
| Letter Z | 10–13 | 100 | 0.95 | 0.96 | 1.05% | 1.00 | 1.00 | 0.00% | 0.95 | 0.96 | 1.05% | 1 |
| Average | 11.73 | 100 | 0.922 | 0.942 | 2.169% | 0.945 | 0.987 | 4.444% | 0.855 | 0.911 | 6.550% | 1.692 |
A3 (NeSy-π efficiency): NeSy-π can improve the time efficiency for αILP system. The invented predicates improve the expressiveness of the language so that the rules can be expressed by shorter clauses. Consequently, the algorithm needs fewer iterations to search the target clauses, thereby improving the time efficiency.
In Fig. 9, the graph displays the runtime for each alphabet pattern. The height of each bar represents the corresponding letter’s run-time, with the color indicating the number of groups N covered by the respective target clause. The fewer groups the target clause covers, the fewer iterations the algorithm requires. Figure 9 (c) and (d) show the ranking of the training time in descending order. On average, the NeSy-
Fig. 9.
Time consumption on Alphabet Patterns. Time consumption of the individual letters in descending order. The red dashed lines show the average time for each plot. The colors of the bars differ according to the number of groups covered by the target clauses. (A). Grouping time of αILP. (B). Grouping time of αILP with NeSy-π. (C). Training time of αILP. (D). Training time of αILP with NeSy-π.
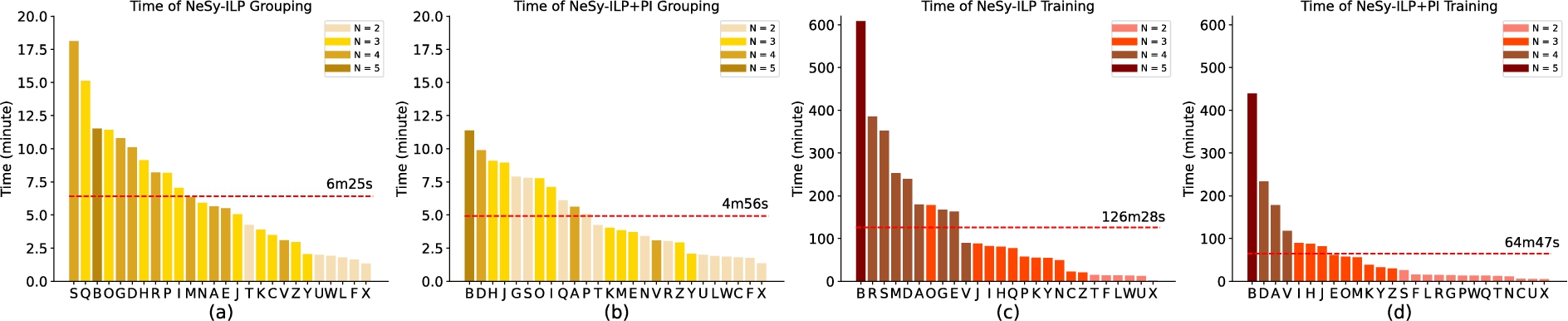
Fig. 10.
Examples of robustness test dataset. The top row displays a selection of the original letter patterns. The bottom row shows negative letter patterns with one object randomly removed. To solve this dataset correctly, the model needs to be robust to the falsifying negative scenes not appeared in the training phase.
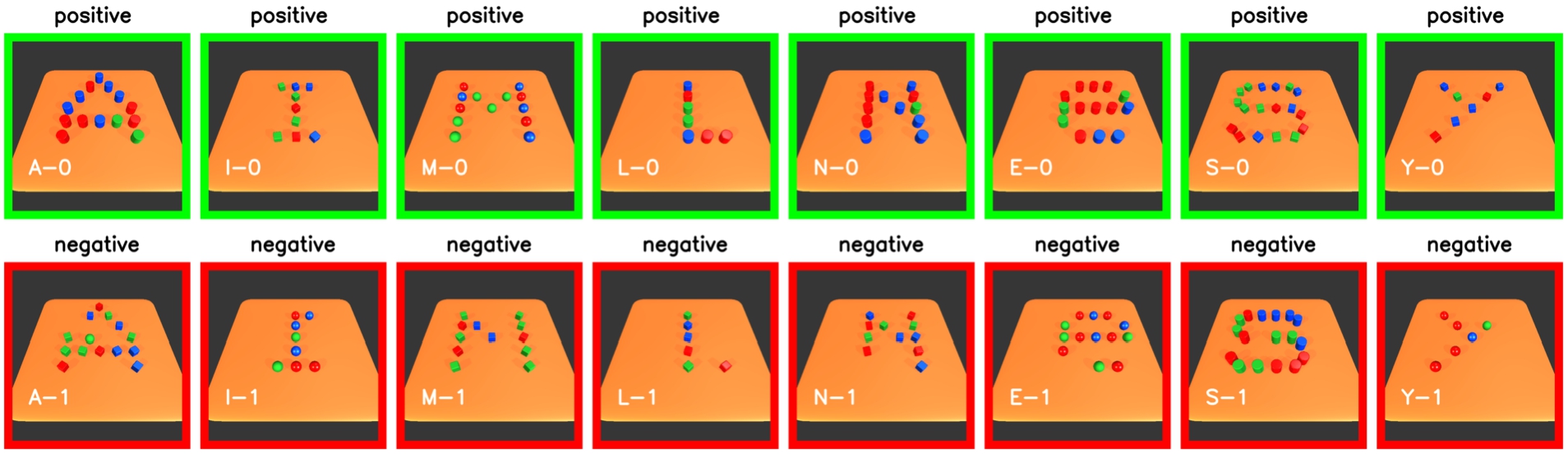
Fig. 11.
NeSy-π is robust to unseen falsifying examples. The evaluation of Alphabet pattern’s robustness is presented. Left: the NeSy-π performance in distinguishing negative examples is evaluated on two test sets. The purple line is based on a test set with dissimilar patterns as the negative examples, where different letters are used as negative examples. The orange line use a test set with similar patterns as negative examples, where one object is randomly removed from the same letters used as negative examples. Right: the performance of αILP and NeSy-π on the test set, where negative examples using similar patterns as positive patterns. The N-measure of NeSy-π achieves a higher average score compared to αILP.

A4 (NeSy-π robustness): In this experiment, we show that NeSy-π is robust to falsifying patterns that have not seen in the training phase, i.e. NeSy-π exhibits robustness in distinguishing similar positive and negative examples in the dataset, achieving high accuracy despite their similarity.
Dataset. In order to evaluate the robustness of the learned clauses, another test dataset for the alphabet patterns is generated with similar positive and negative scenes. The positive scenes are still generated from the original letter patterns. However, the negative scenes are generated by intervening the positive scenes, i.e. randomly removing one object from the positive patterns, as shown in Fig. 10. Such negative patterns are not seen by the model during training. To solve this task correctly, models need to be keen on small violations of the learned logical concepts.
Result. Fig. 11 shows the evaluation result for the robustness test dataset. In comparison to the efficiency result in A3, when negative examples with similar patterns as positive examples are used, NeSy-π performance on N-Measure decreases from 0.98 to 0.77. Additionally, none of the test image patterns were seen by the model during the training period, and they are also very similar to the positive patterns (with only one object removed). In addition, when the robustness test dataset is applied to the clauses acquired through αILP, the N-Measure average is approximately 0.70, as demonstrated in the right plot of Fig. 11. In this case, the NeSy-π attains a higher N-Measure.
5.Related work
We revisit relevant studies of NeSy-π.
Inductive Logic Programming and Predicate Invention. Inductive Logic Programming (ILP) [3,22,24,26] has emerged at the intersection of machine learning and logic programming. ILP learns generalized logic rules given positive and negative examples using background knowledge and language biases. Many symbolic ILP frameworks have been developed, e.g., FOIL [27], Progol [22], ILASP [19], Metagol [6,8], and Popper [4], showing their advantages of learning explanatory programs from small data. To handle uncertainties in ILP, statistical ILP approaches have been addressed, e.g. Markov Logic Networks [28] with their structure-learning algorithm [15]. Predicate invention (PI) has been a long-standing problem for ILP and many methods have been developed [2,5–7,12,17,33], and extended to the statistical ILP systems [16].
Recently, differentiable ILP frameworks have been developed to integrate DNNs with logic reasoning and learning [10,29–31]. ∂ILP [10] is the first end-to-end differentiable ILP solver, where they learn rules by gradient descent. ∂ILP can perform predication invention to compose solutions with less inductive biases. ∂ILP-ST [29] extends it by incorporating efficient search techniques developed for symbolic ILP systems, enabling the system to handle more complex rules using function symbols. To this end, Neuro-Symbolic ILP systems that can handle complex visual scenes as inputs have been developed. αILP [30] performs differentiable structure learning on visual scenes, however, these extended differentiable ILP systems do not support predicate invention. NeSy-π extends this approach by providing the predicate invention algorithm, leading them to learn from less supervision and background knowledge. Many other neuro-symblic systems have been established, e.g. DeepProbLog [20], NeurASP [37], SLASH [32] for parameter learning and FFNSL [9] for structure learning. NeSy-π could be integrated to these systems to allow predicate invention from complex visual scenes.
Meta rules, which define a template for rules to be generated, have been used for dealing with new predicates in (NeSy) ILP systems [10,14]. NeSy-π achieves memory-efficient predicate invention system by performing scoring and pruning of candidates from given data, and this is crucial to handle complex visual scenes in NeSy-ILP systems since they are memory-intensive [10].
Visual Reasoning. The machine-learning community has developed many visual datasets with reasoning requirements. Visual Question Answering (VQA) [1,18,36] is a well-established scheme to learn to answer questions given as natural language sentences together with input images. VQA assumes the programs to compute answers are given as a question, however, NeSy-π learns the programs from scratch using positive and negative examples. Kandinsky Patterns [25] are proposed as an environment to generate images that contain abstract objects (e.g. red cube) to evaluate neural and neural-symbolic systems. In a similar vein, CLEVR-Hans [34] has been developed, where the task is to classify 3D CLEVR scenes [13] based on classification rules that are defined on high-level concepts of objects’ attributes and their relations. These datasets can be used to evaluate various models on visual reasoning, however, they do not involve with predicate invention, thus it is not trivial to evaluate predicate invention systems using them. The proposed 3D Kandinsky Patterns extends these studies by having predicate invention tasks at its core, and it is the first to evaluate neuro-symbolic systems in terms of the ability of predicate invention.
6.Conclusion
We proposed Neural-Symbolic Predicate Invention (NeSy-π), which discovers useful relational concepts from complex visual scenes. NeSy-π can reduce the amount of required background knowledge or supplemental pre-training of neuro-symbolic ILP frameworks by providing invented predicates to them. Thus NeSy-π extends the applicability of neuro-symbolic ILP systems to wide range of tasks. Moreover, we developed 3D Kandinsky Patterns datasets, which is the first environment to evaluate neuro-symbolic predicate invention systems on 3D visual scenes. In our experiments, we have shown that (i) NeSy-π can invent useful predicates from visual scenes improving the performance of NeSy-ILP systems, (ii) NeSy-π can solve complex patterns that cannot be solved by the state-of-the-art NeSy-ILP baseline, (iii) NeSy-π is computationally efficient, and (iv) NeSy-π is robust to unseen falsifying examples. Developing a differentiable approach to fine-tune the given parameters is a promising avenue for future work. Also taking an unsupervised approach for predicate invention is another interesting future direction.
Notes
1 There have been proposed different instances of NeSy-ILP systems to integrate DNNs with ILP. In this work, we particularly focus on αILP [30], which performs structure learning on given positive and negative visual scenes, where each visual scene is converted to a set of probabilistic atoms, and each weighted rule describes the scenes.
2 This corresponds to a specific downward refinement operator [26], which generates new specified clauses by modifying given clause.
Appendices
Appendix A.
Appendix A.Experiment setting
A.1.Spatial neural predicates
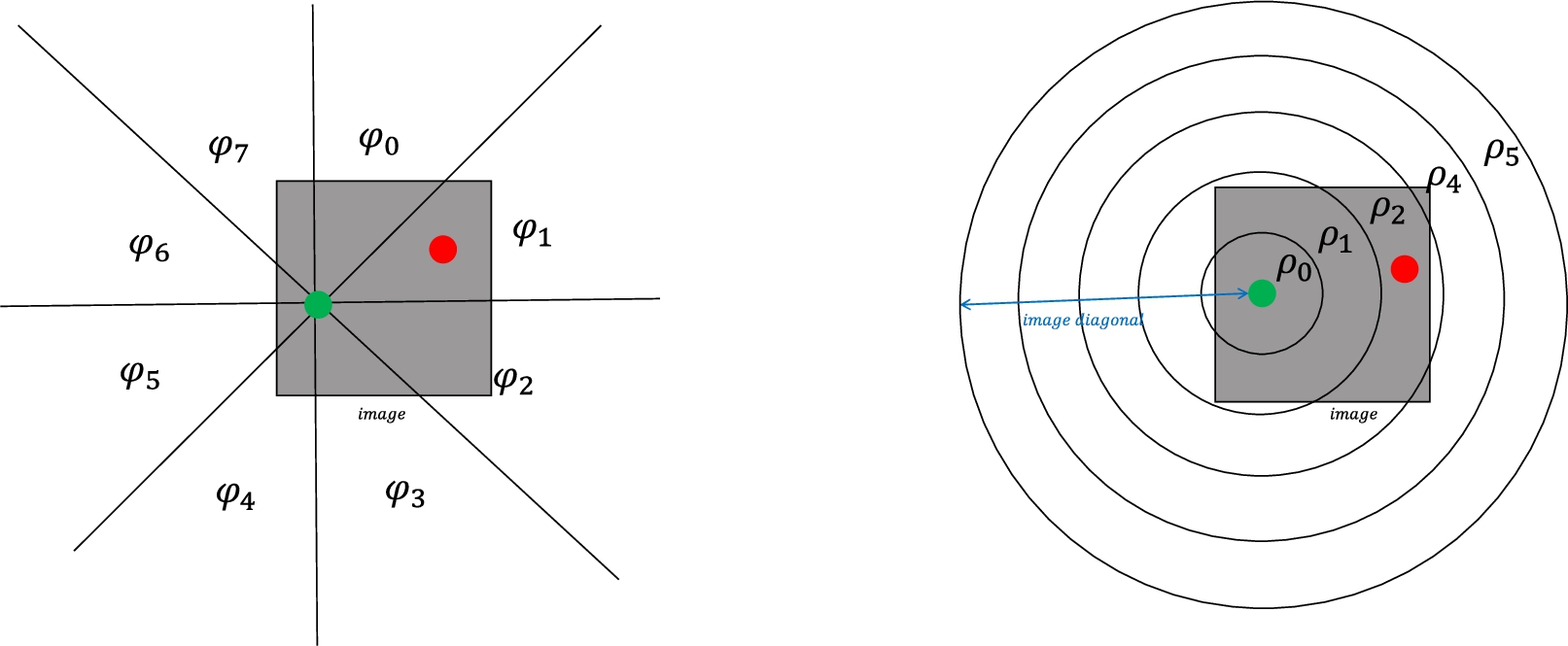
To represent the spatial relationships between two objects, we have developed two types of spatial neural predicates, i.e.,
Fig. 12.
Spatial neural predicates explanation by examples. Left: directions of red circle with respect to green circle denoted by symbols
Appendix B.
Appendix B.More experiment result
Figure 13 shows the learning result on Simple Kandinsky Patterns (Diagonal, Three Same, Two Pairs). Two positive and two negative images are given as examples in the left side. The target clauses searched by αILP and the predicated invented by NeSy-π are listed on the right side.
Fig. 13.
Simple Kandinsky patterns from top to bottom: Diagonal, Three Same, Two Pairs. In each patterns, two positive (green border) and two negative examples (red border) are shown in left side. The target clauses searched by NeSy-α and the predicates invented by NeSy-π are listed on the right side.
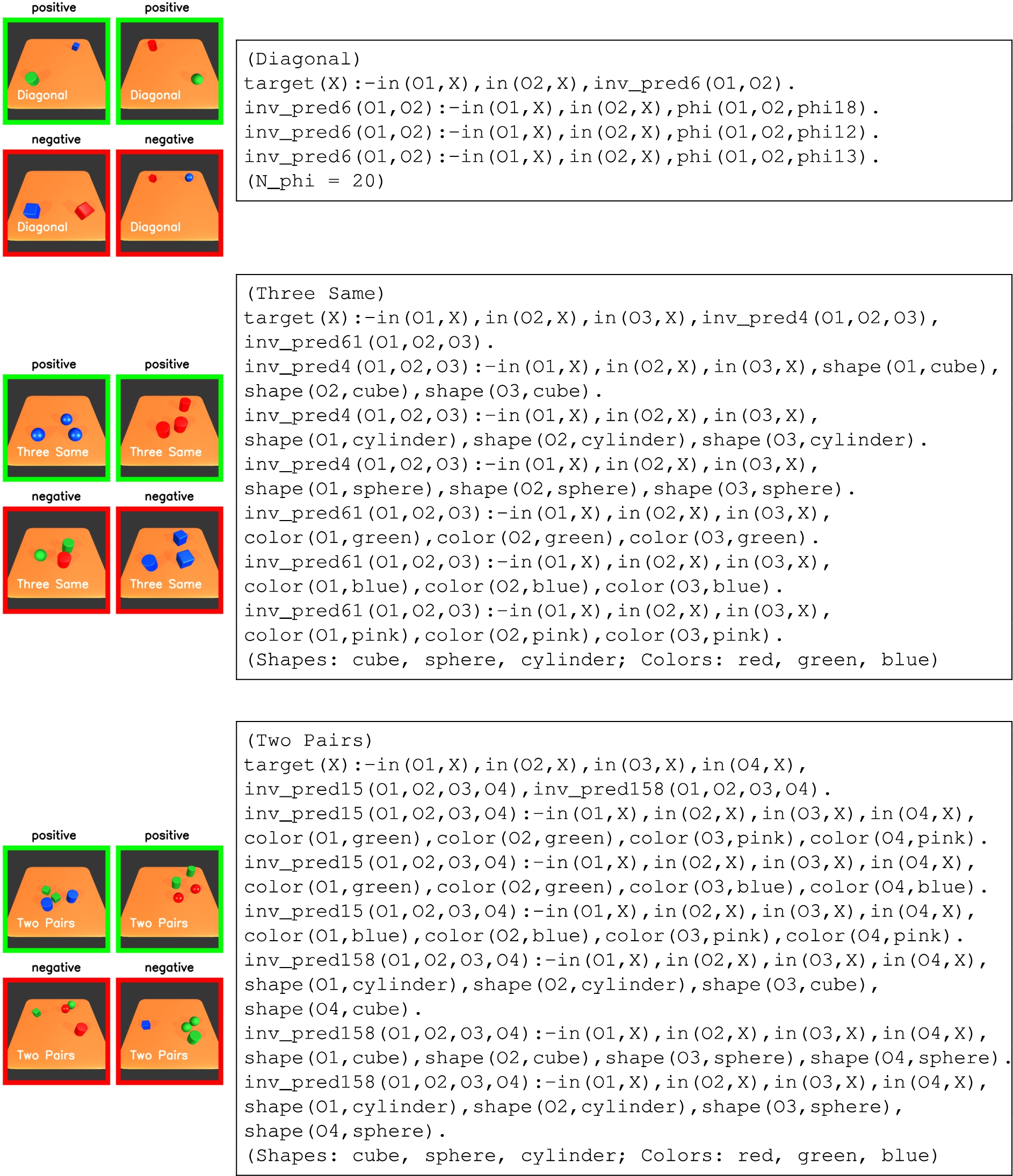
Fig. 14.
Complex Kandinsky patterns from top to bottom: parallel, perpendicular, square. In each patterns, two positive (green border) and two negative examples (red border) are shown in left side. The target clauses searched by NeSy-α and the predicates invented by NeSy-π are listed on the right side.
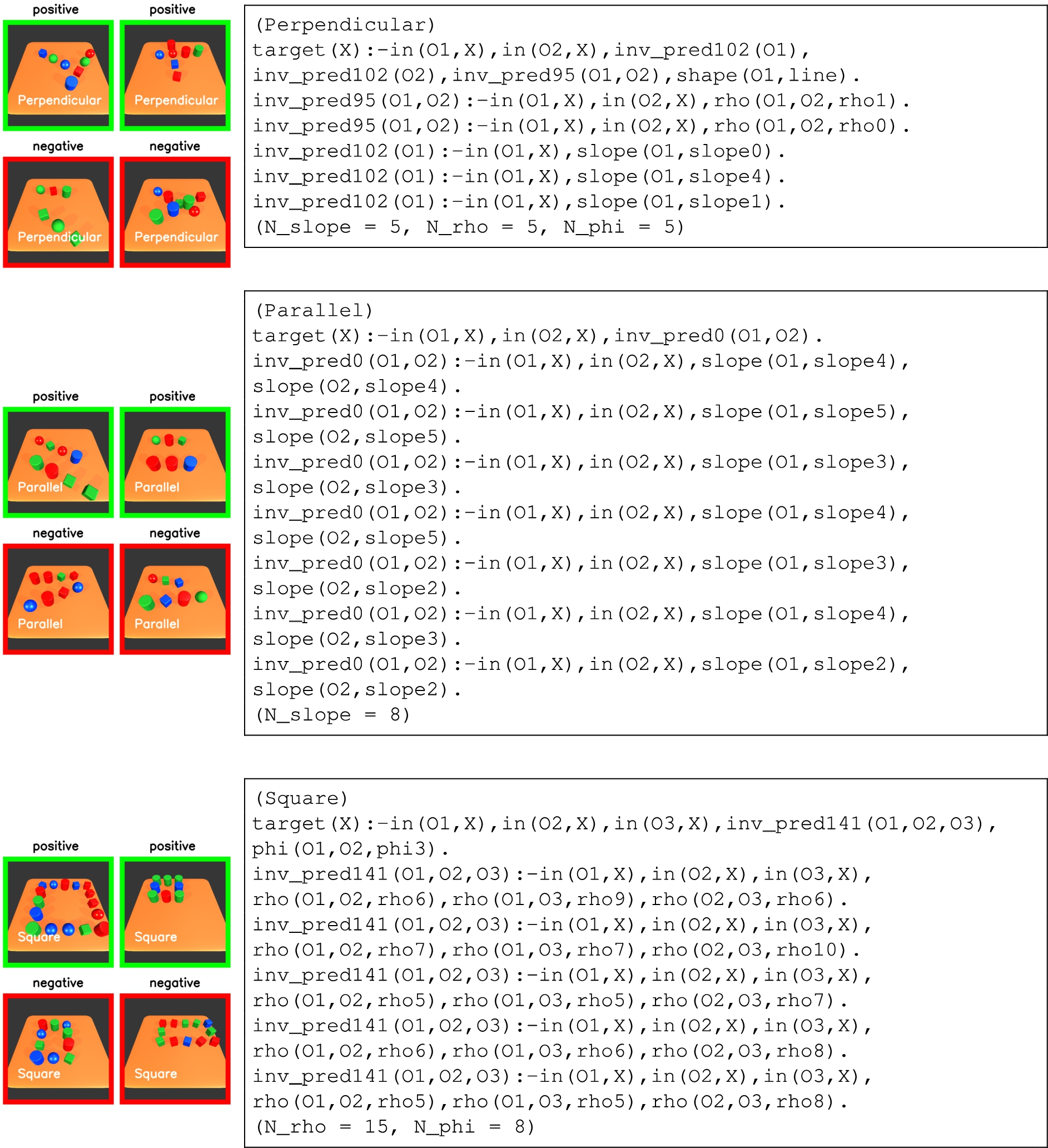
Figure 15 shows the examples of each letter patterns in Alphabet Pattern Dataset. Each letter includes its upper and lower case examples. Figure 17 shows the learning result on some of the Alphabet Patterns.
Fig. 15.
Latin Alphabet Patterns. Latin letters (including both upper and lower cases) constructed by multiple objects. The shape of each letter is mainly composed of lines.
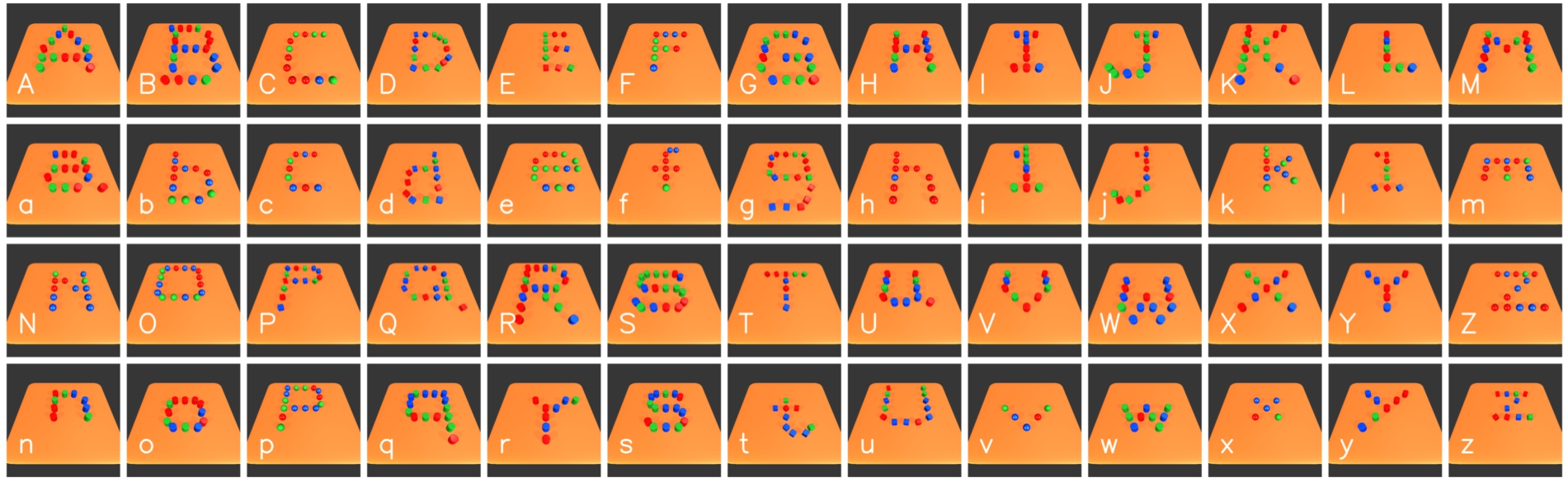
Fig. 16.
Alphabet Pattern N and E from top to bottom: letter N, E. In each patterns, upper and lower case examples are shown in left side. The target clauses searched by NeSy-α and the predicates invented by NeSy-π are listed on the right side.
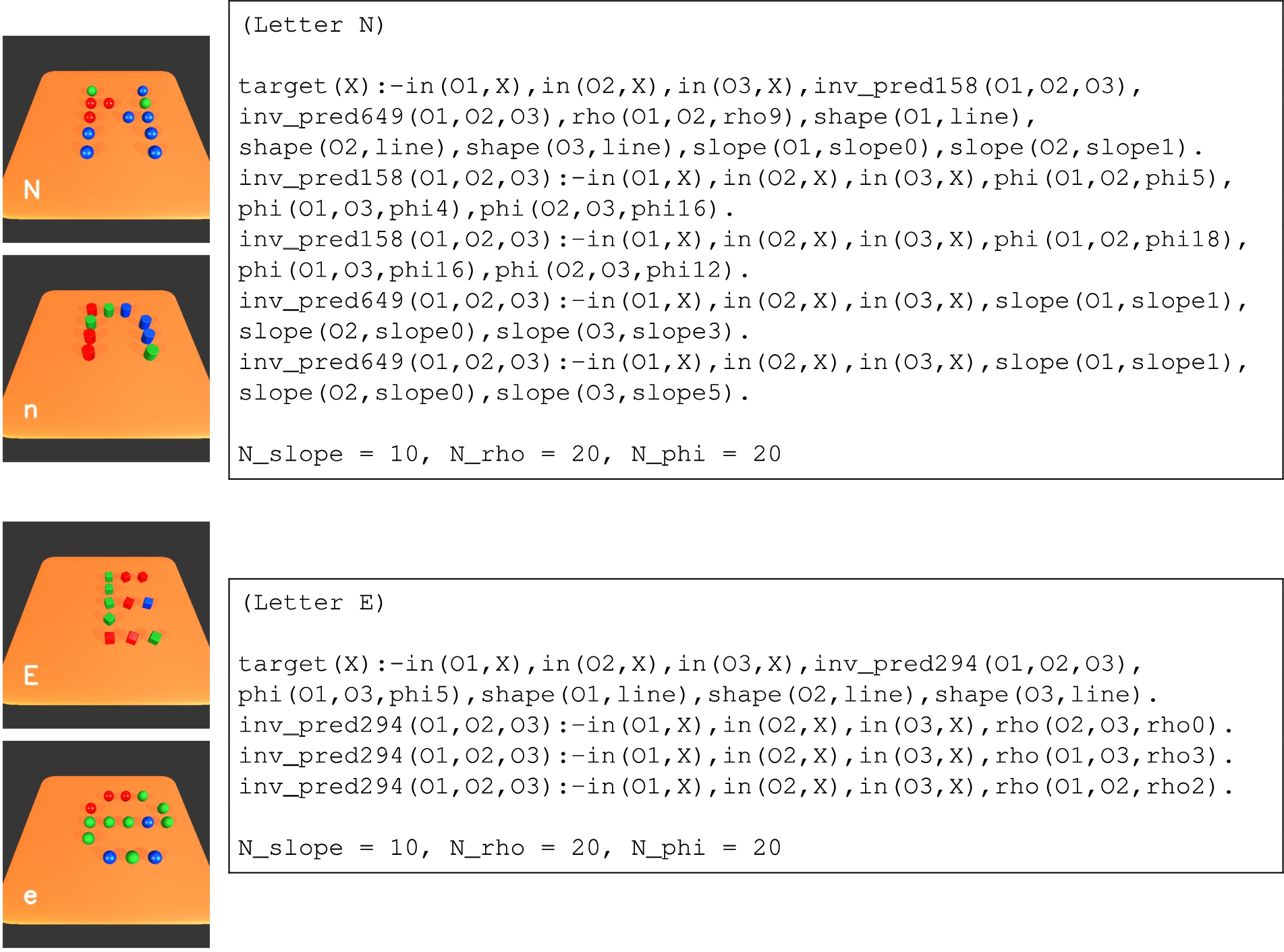
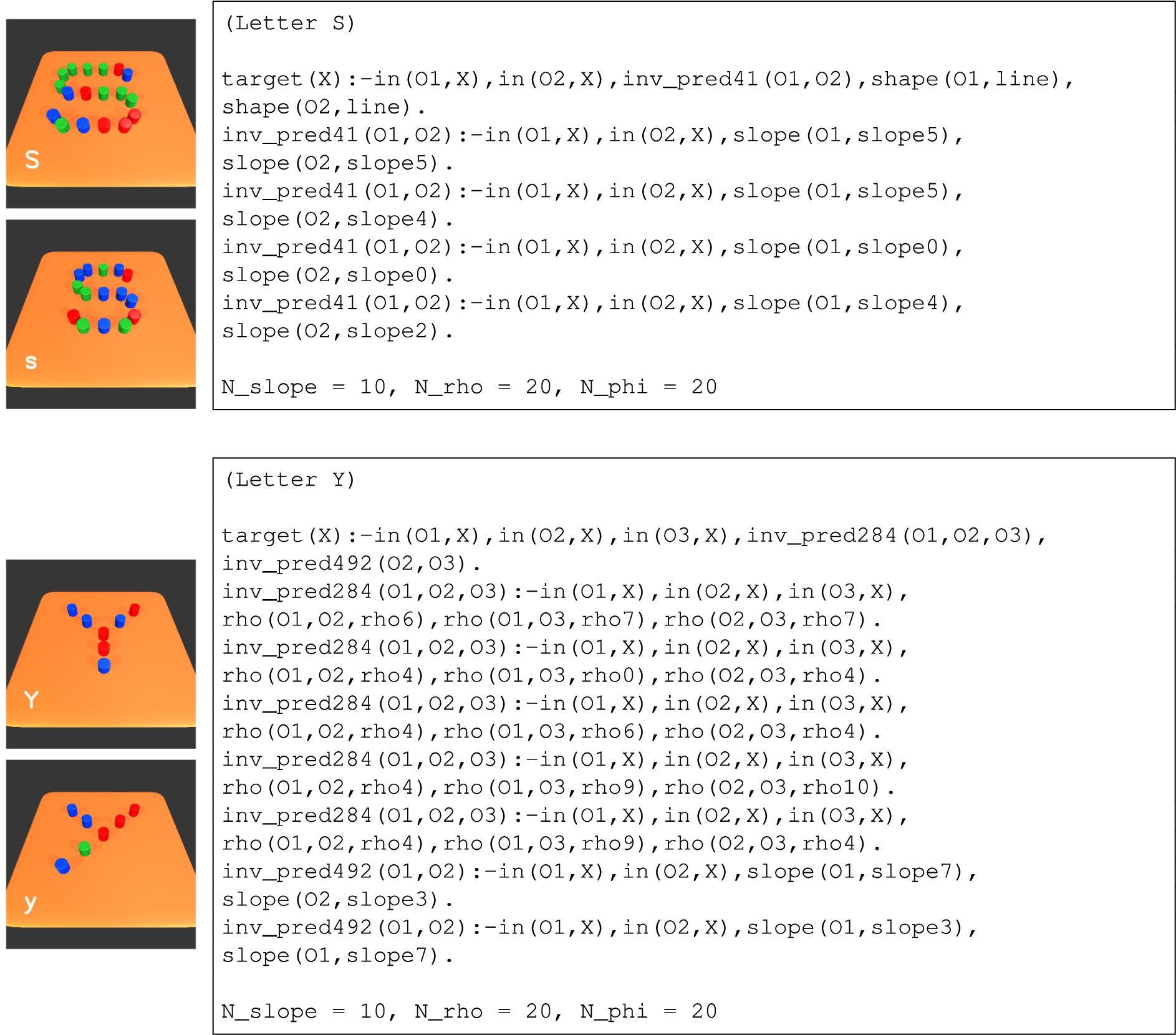
Fig. 17.
Alphabet Pattern S and Y from top to bottom: letter S, Y. In each patterns, upper and lower case examples are shown in left side. The target clauses searched by NeSy-α and the predicates invented by NeSy-π are listed on the right side.
References
[1] | S. Antol, A. Agrawal, J. Lu, M. Mitchell, D. Batra, C.L. Zitnick and D. Parikh, Vqa: Visual question answering, in: International Conference on Computer Vision (ICCV), (2015) . |
[2] | D. Athakravi, K. Broda and A. Russo, Predicate invention in Inductive Logic Programming, in: 2012 Imperial College Computing Student Workshop, OpenAccess Series in Informatics (OASIcs), Vol. 28: , Schloss Dagstuhl–Leibniz-Zentrum fuer Informatik, Dagstuhl, Germany, (2012) , pp. 15–21. |
[3] | A. Cropper, S. Dumancic, R. Evans and S.H. Muggleton, Inductive logic programming at 30, Mach. Learn. 111: (1) ((2022) ), 147–172. doi:10.1007/s10994-021-06089-1. |
[4] | A. Cropper and R. Morel, Learning programs by learning from failures, Mach. Learn. 110: (4) ((2021) ), 801–856. doi:10.1007/s10994-020-05934-z. |
[5] | A. Cropper and R. Morel, Predicate Invention by Learning from Failures, (2021) , arXiv preprint, arXiv:2104.14426. |
[6] | A. Cropper, R. Morel and S. Muggleton, Learning higher-order logic programs, Mach. Learn. 109: ((2019) ), 1289–1322. doi:10.1007/s10994-019-05862-7. |
[7] | A. Cropper, R. Morel and S.H. Muggleton, Learning higher-order programs through Predicate Invention, in: Proceedings of the AAAI Conference on Artificial Intelligence (AAAI), (2020) , pp. 13655–13658. |
[8] | A. Cropper and S.H. Muggleton, Metagol System, (2016) , https://github.com/metagol/metagol. |
[9] | D. Cunnington, M. Law, J. Lobo and A. Russo, FFNSL: Feed-forward neural-symbolic learner, Mach. Learn. 112: (2) ((2023) ), 515–569. doi:10.1007/s10994-022-06278-6. |
[10] | R. Evans and E. Grefenstette, Learning explanatory rules from noisy data, J. Artif. Intell. Res. 61: ((2018) ), 1–64. doi:10.1613/jair.5714. |
[11] | K. He, G. Gkioxari, P. Dollár and R. Girshick, Mask R-CNN, in: 2017 IEEE International Conference on Computer Vision (ICCV), (2017) , pp. 2980–2988. doi:10.1109/ICCV.2017.322. |
[12] | C. Hocquette and S.H. Muggleton, Complete bottom-up Predicate Invention in meta-interpretive learning, in: Proceedings of the Twenty-Ninth International Joint Conference on Artificial Intelligence, (IJCAI) International Joint Conferences on Artificial Intelligence Organization, (2020) , pp. 2312–2318. |
[13] | J. Johnson, B. Hariharan, L. Van Der Maaten, L. Fei-Fei, C.L. Zitnick and R. Girshick, Clevr: A diagnostic dataset for compositional language and elementary visual reasoning, in: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), (2017) , pp. 2901–2910. |
[14] | T. Kaminski, T. Eiter and K. Inoue, Exploiting answer set programming with external sources for meta-interpretive learning, Theory and Practice of Logic Programming 18: (3–4) ((2018) ), 571–588. doi:10.1017/S1471068418000261. |
[15] | S. Kok and P. Domingos, Learning the structure of Markov logic networks, in: International Conference on Machine Learning, (2005) . |
[16] | S. Kok and P.M. Domingos, Statistical Predicate Invention, in: International Conference on Machine Learning (ICML), (2007) . |
[17] | S. Kramer, Predicate Invention: A Comprehensive View 1, (2007) . |
[18] | R. Krishna, Y. Zhu, O. Groth, J. Johnson, K. Hata, J. Kravitz, S. Chen, Y. Kalantidis, L. Li, D.A. Shamma, M.S. Bernstein and L. Fei-Fei, Visual genome: Connecting language and vision using crowdsourced dense image annotations, Int. J. Comput. Vis. 123: (1) ((2017) ), 32–73. doi:10.1007/s11263-016-0981-7. |
[19] | M. Law, A. Russo and K. Broda, Inductive learning of answer set programs, in: Logics in Artificial Intelligence – 14th European Conference (JELIA), E. Fermé and J. Leite, eds, Lecture Notes in Computer Science, Vol. 8761: , (2014) , pp. 311–325. |
[20] | R. Manhaeve, S. Dumančić, A. Kimmig, T. Demeester and L. De Raedt, Neural probabilistic logic programming in DeepProbLog, Artif. Intell. 298: ((2021) ), 103504. doi:10.1016/j.artint.2021.103504. |
[21] | J. Mao, C. Gan, P. Kohli, J.B. Tenenbaum and J. Wu, The neuro-symbolic concept learner: Interpreting scenes, words, and sentences from natural supervision, in: International Conference on Learning Representations (ICLR), (2019) . |
[22] | S. Muggleton, Inverse entailment and progol, New Generation Computing, Special issue on Inductive Logic Programming 13: (3–4) ((1995) ), 245–286. |
[23] | S. Muggleton and W.L. Buntine, Machine invention of first order predicates by inverting resolution, in: Proceedings of the Fifth International Conference on Machine Learning, ML’88, Morgan Kaufmann Publishers Inc., San Francisco, CA, USA, (1988) , pp. 339–352. ISBN 0934613648. |
[24] | S.H. Muggleton, Inductive Logic Programming, New Gener. Comput. 8: (4) ((1991) ), 295–318. doi:10.1007/BF03037089. |
[25] | H. Müller and A. Holzinger, Kandinsky patterns, Artificial Intelligence 300: ((2021) ), 103546. doi:10.1016/j.artint.2021.103546. |
[26] | S.-H. Nienhuys-Cheng, R.D. Wolf, J. Siekmann and J.G. Carbonell, Foundations of Inductive Logic Programming, (1997) . |
[27] | J.R. Quinlan, Learning logical definitions from relations, Mach. Learn. 5: ((1990) ), 239–266. doi:10.1007/BF00117105. |
[28] | M. Richardson and P.M. Domingos, Markov logic networks, Mach. Learn. 62: (1–2) ((2006) ), 107–136. doi:10.1007/s10994-006-5833-1. |
[29] | H. Shindo, M. Nishino and A. Yamamoto, Differentiable Inductive Logic Programming for structured examples, in: Proceedings of the 35th AAAI Conference on Artificial Intelligence (AAAI), (2021) , pp. 5034–5041. |
[30] | H. Shindo, V. Pfanschilling, D.S. Dhami and K. Kersting, αILP: Thinking visual scenes as differentiable logic programs, Mach. Learn. ((2023) ). |
[31] | H. Shindo, V. Pfanschilling, D.S. Dhami and K. Kersting, Learning Differentiable Logic Programs for Abstract Visual Reasoning, (2023) , arXiv preprint, arXiv:2307.00928. |
[32] | A. Skryagin, W. Stammer, D. Ochs, D.S. Dhami and K. Kersting, Neural-probabilistic answer set programming, in: International Conference on Principles of Knowledge Representation and Reasoning (KR), (2022) . |
[33] | I. Stahl, Predicate invention in ILP – an overview, in: Machine Learning: ECML-93, P.B. Brazdil, ed., Springer, Berlin Heidelberg, (1993) , pp. 311–322. doi:10.1007/3-540-56602-3_144. |
[34] | W. Stammer, P. Schramowski and K. Kersting, Right for the right concept: Revising neuro-symbolic concepts by interacting with their explanations, in: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), (2021) , pp. 3619–3629. |
[35] | Unity Technologies, Unity, https://unity.com/. |
[36] | Q. Wu, D. Teney, P. Wang, C. Shen, A. Dick and A. Van Den Hengel, Visual question answering: A survey of methods and datasets, Image Vis. Comput. 163: ((2017) ), 21–40. doi:10.1016/j.cviu.2017.05.001. |
[37] | Z. Yang, A. Ishay and J. Lee, NeurASP: Embracing neural networks into answer set programming, in: International Joint Conference on Artificial Intelligence (IJCAI), C. Bessiere, ed., (2020) , pp. 1755–1762. |


