
Novel entropy and distance measures of linguistic interval-valued q-Rung orthopair fuzzy sets
Abstract
Entropy is an important tool to describe the degree of uncertainty of fuzzy sets. In this study, we first define a new entropy and distance measure in the linguistic q-Rung orthopair fuzzy (LIVqROF) environment, and verify its correctness and rationality. Secondly, in the LIVqROF environment, the new entropy formula is effectively applied to the multi-attribute decision making (MADM) with unknown attribute weights, which provides a new idea for solving the MADM problems. Finally, the feasibility and effectiveness of the proposed method are verified by a numerical example.
1Introduction
Zadeh [1] proposed the fuzzy set (FS), which only has the membership degree, and it is difficult to describe the negative degree of the decision maker to the evaluation information. Atanassov [2, 3] proposed intuitionistic fuzzy set (IFS) on the basis of fuzzy set, and creatively added non-membership degree to the fuzzy sets. However, intuitionistic fuzzy numbers can only be used to describe the evaluation information in the form of real numbers. Due to the complexity of the decision-making environment, the decision making information is often uncertain. Sometimes it is very difficult to express the membership and non-membership degree with real numbers. Therefore, Atanassov [4] also proposed interval intuitionistic fuzzy set (IVIFS), which membership and non-membership are interval numbers rather than real numbers. In real life, the form of linguistic terms is often used to qualitatively evaluate information. Zadeh [5] proposed the fuzzy linguistic method, and Zhang [6] defined the concept of linguistic intuitionistic fuzzy set (LIF). Similar to intuitionistic fuzzy sets, linguistic intuitionistic fuzzy sets are also limited by the representation range. Inspired by the concepts of Pythagorean fuzzy set (PFS) and q-Rung orthopair fuzzy set (qROFS) introduced by Yager in [7] and [8], Garg [9] proposed linguistic Pythagorean fuzzy set (LPFS) and Lin [10] developed the concept of linguistic q-Rung orthopair fuzzy set (LqROFS). Linguistic interval intuitionistic fuzzy numbers can better deal with the uncertainty and fuzziness of decision information, and can truly reflect the objective world. Garg proposed linguistic interval intuitionistic fuzzy set (LIVIFS) and linguistic interval Pythagorean fuzzy set (LIVPFS) in [11] and [12], respectively. Khan [13] established linguistic interval q-Rung orthopair fuzzy set (LIVqROFS).
Information measure plays an important role in fuzzy set theory, and many researchers have explored it from different perspectives. In order to deal with the fuzziness measurement between FSs, De Luca and termini [14] gave an axiomatic definition of fuzzy entropy based on Shannon [15]. Since then, Hooda et al. [16, 17], Mishra et al. [18–21], Pal [22] have studied various entropy measures of FSs. Burillo and Bustance [23] defined the intuitionistic fuzzy entropy to measure the hesitation degree of intuitionistic fuzzy sets. Liu [24] presented the interval intuitionistic fuzzy entropy.Li [25, 26] gave the study of slope entropy and fractional slope entropy. Zhang and Jiang [27], Zhang [28], Wei [29], and Wei and Zhang [30] introduced the entropy measure of IVIFSs and applied it in solving MADM problems. Rani [31] gave a new entropy measure of IVIFS, Kumar et al. [32] gave a new Pythagorean fuzzy entropy, Sonia et al. [33] gave a entropy measures for interval valued intuitionistic fuzzy soft set and Ohlan [34] presented a distance measure on IVIFS. Inspired by their research, this paper defines an entropy measure and distance measure in LIVqROF environment. The relationship between the proposed entropy measure and distance measure are studied.
The rest of this paper is arranged as follows. In Section 2, we introduce some definitions and operation rules on IVIFSs and LIVqROFSs. In Section 3, the axiomatic definitions of entropy and distance in LIVqROF environment are given, a new entropy and distance are proposed, and their rationality and relevance are proved. In Section 4, a multi-attribute decision making method is proposed in LIVqROF environment by using the proposed entropy. A numerical example is used to verify the effectiveness and rationality of the method.
2Preliminary
The linguistic assessment scale is the basis of linguistic decision making. In [35], Bordogna et al. defined an additive linguistic scale.
Definition 2.1.Let
(1) The set is ordered: s α < s β if α < β.
(2) There is a negative operator: neg (s α) = s β such that α + β = t.
where t is an even number and s α refers to linguistic terms.
After that, Xu [36] extended the discrete term set S to a continuous term set
Combining the concept of intuitionistic fuzzy sets [2] with the definition of linguistic terms [35], Zhang [6] first proposed the concept of linguistic intuitionistic fuzzy sets(LIFSs), which is defined as follows.
Definition 2.2.Let X = {x1, x2, ⋯ , xn} be a finite universe discourse and
(1)
For convenience, the pairs of (sθ (xi) , sσ (xi)) are called as linguistic intuitionistic fuzzy value(LIFV) or linguistic intuitionistic fuzzy number(LIFN).
On the basis of LIFSs and the concept of Pythagorean fuzzy sets [7], Garg [9] proposed the concept of linguistic Pythagorean fuzzy sets(LPFSs), which is defined as follows.
Definition 2.3.Let X = {x1, x2, ⋯ , xn} be a finite universe discourse and
(2)
Similarly, the pairs of (sθ (xi) , sσ (xi)) are called as linguistic Pythagorean fuzzy value(LPFV) or linguistic Pythagorean fuzzy number(LPFN).
On the basis of LIFSs, LPFSs and q-rung orthopair fuzzy sets [8], Lin [10] proposed linguistic q-rung orthopair fuzzy sets(LqROFSs), which is defined as follows.
Definition 2.4.Let X = {x1, x2, ⋯ , xn} be a finite universe discourse and
(3)
Similarly, the orthopair of (sθ (xi) , sσ (xi)) is called as linguistic q-rung orthopair fuzzy value(LqROFV) or linguistic q-rung orthopair fuzzy number(LqROFN).
Obviously, when q = 1 and q = 2, the two special cases of LqROFSs are LIFSs and LPFSs, respectively.
In [4], Atanassov and Gargov proposed the concept of interval-valued intuitionistic fuzzy sets(IVIFSs), which is defined as follows.
Definition 2.5.Let X = {x1, x2, ⋯ , xn} be a finite universe discourse. Then the form of a IVIFS on Y is defined as
(4)
For convenience, the pairs of
If
In [11, 37], Garg, Liu et al. defined the concept of linguistic interval-valued intuitionistic fuzzy sets(LIVIFSs). In [12], Garg proposed the concept of linguistic interval-valued Pythagorean fuzzy sets(LIVPFSs). On this basis, Khan et al. [13] further proposed linguistic interval-valued q-rung orthopair fuzzy sets(LIVqROFSs), which is defined as follows.
Definition 2.6.Let X = {x1, x2, ⋯ , xn} be a finite universe discourse and
(5)
Obviously, when q = 1 and q = 2, the two special cases of LIVqROFSs are LIVIFSs and LIVPFSs, respectively. If
For convenience, the pairs of
Definition 2.7.[38] Let
(1) If
(2) If
(3) Negation of
In [39], Bustince and Burillo proposed the axiomatic definition of entropy measure for IFSs. Analogously, in [24], Liu, Zheng and Xiong proposed the entropy measure of IVIFSs, which is defined as follows.
Definition 2.8. An entropy measure of IVIFS (X) is a real-valued function F : IVIFS (X) → [0, 1], if it satisfies the following conditions:
(F1)
(F2)
(F3)
(F4)
In [40], D
Definition 2.9. Let
(D1)
(D2)
(D3)
(D4) If
3Entropy and distance measures for LIVqROFSs
Pal [41] proposed the exponential entropy measure of a fuzzy set A (A ∈ F (X) = {(xi, μ (xi)) |xi ∈ X}) as
(6)
Rani et al. [31] proposed the exponential entropy and distance measure for IVIFSs. Inspired by this, this study will discuss the problem of LIVqROFSs on entropy and distance measure. In the following, we give the axiomatic definition of entropy and distance measure for LIVqROFSs.
Definition 3.1.An entropy measure of LIVqROFS (X) is a real-valued function E : LIVqROFS (X) → [0, 1], if it satisfies the following conditions:
(E1)
(E2)
(E3)
(E4)
Definition 3.2. Let
(D1)
(D2)
(D3)
(D4) If
Definition 3.3. Let
Definition 3.4. Let
(7)
In the following, we prove the validity of our proposed entropy measure (7).
Theorem 3.5. The mapping
Proof. Obviously to prove that
(E1)Let
On the other hand, if
(8)
or
(9)
for each xi ∈ X. Now Equations (8) and (9) hold if either
(E2)Let
On the other hand, let
(10)
(E3) Form
(E4)If we take
(11)
Taking the partial derivatives of g with respect to x and y, respectively, we get
(12)
(13)
Thus, g (x, y) is increasing with respect to x when x ≤ y and is decreasing when x ≥ y. Similarly, we obtain that
Now if
Similarly, when
By calculating the weight of each element xi ∈ X, a weighted exponential entropy measure of LIVqROFS is proposed as follows:
(14)
It is clear, if
For A1, A2 ∈ FS (X) , X = {x1, x2, ⋯ , xn}, Fan and Xie [42] proposed the fuzzy information for discrimination of
(15)
The fuzzy distance between A1 and A2 is defined by
(16)
For
(17)
The distance measure for IVIFSs is defined as
(18)
Inspired by the above distance measures of FSs and IVIFSs, now the distance measures of LIVqROFSs can be defined as the following.
Definition 3.6. Let
(19)
Theorem 3.7. If q = 1, the relation between
Proof.
Definition 3.8. Let
(20)
In particular, if q = 1, then
(21)
Theorem 3.9. The mapping
Proof. In order for Equation (20) to be qualified as a sensible measure of LIVqROFSs, it must satisfy the conditions (D1)-(D4) in Definition 3.2.
(D1)It is clear that the function h (t) =2 - (1 - t) et - (1 + t) e-t in interval [-1,1] has maximum value fmax (t) =2 - 2e-1 and minimum value fmin (t) =0. h (t) is decreasing in [-1,0] and is increasing in [1]. Since
(D2)Let
(D3)
(D4)If
It can be said that
4Application of the proposed entropy measure of LIVqROFSs
Now we apply the proposed LIVqROFSs based weighted entropy measure to the Multi-criteria group decision making (MCGDM) problem. Therefore, we introduce a MCGDM model based on LIVqROFS weighted entropy measure.
4.1A method of group decision making of LIVqROFS setting based on the proposed weighted entropy measure
We provide a group decision making method based on LIVqROFSs with the known experts and unknown criteria weights. Let
Step 1. Construct the linguistic interval-valued q-rung orthopair fuzzy decision matrices
Step 2. Based on the given expert weights, apply the proposed LIVqROF operators(Khan et al. [13]) to aggregate the LIVqROFVs. We choose the LIVqROFWA operator to aggregate all the decision matrices Rk into a collective decision matrix
Step 3. Calculate the weight vector of the criterion. The weight formula of the criterion is determined as follows.
(22)
Step 4. For each alternative
Step 5. Rank all the alternative
4.2Illustrative example
In the following, we apply the proposed group decision method to the evaluation of college teachers. Five college teachers
Step 1. The decision matrices given by decision makers are shown in Tables 1, 2 and 3.
Table 1
Decision matrix R1 provided by decision maker d1
|
|
|
|
| |
|
| ([s2, s3] , [s3, s4]) | ([s3, s4] , [s1, s4]) | ([s2, s6] , [s1, s3]) | ([s3, s5] , [s2, s4]) |
|
| ([s2, s4] , [s2, s6]) | ([s2, s6] , [s1, s3]) | ([s3, s5] , [s2, s5]) | ([s3, s6] , [s3, s5]) |
|
| ([s3, s5] , [s2, s6]) | ([s4, s6] , [s3, s5]) | ([s3, s4] , [s1, s2]) | ([s3, s5] , [s2, s6]) |
|
| ([s1, s3] , [s3, s4]) | ([s3, s5] , [s2, s4]) | ([s1, s3] , [s3, s6]) | ([s3, s4] , [s2, s6]) |
|
| ([s2, s5] , [s3, s6]) | ([s2, s4] , [s2, s6]) | ([s2, s6] , [s3, s5]) | ([s2, s4] , [s3, s6]) |
Table 2
Decision matrix R2 provided by decision maker d2
|
|
|
|
| |
|
| ([s2, s4] , [s3, s5]) | ([s2, s4] , [s2, s6]) | ([s2, s3] , [s3, s4]) | ([s3, s5] , [s1, s4]) |
|
| ([s3, s6] , [s2, s5]) | ([s3, s5] , [s3, s5]) | ([s3, s6] , [s3, s5]) | ([s4, s6] , [s3, s4]) |
|
| ([s3, s5] , [s2, s6]) | ([s2, s5] , [s3, s4]) | ([s3, s4] , [s1, s3]) | ([s3, s6] , [s2, s5]) |
|
| ([s2, s3] , [s3, s5]) | ([s3, s5] , [s4, s5]) | ([s1, s4] , [s2, s6]) | ([s2, s6] , [s2, s5]) |
|
| ([s3, s4] , [s2, s5]) | ([s3, s4] , [s3, s6]) | ([s3, s6] , [s3, s5]) | ([s2, s5] , [s4, s5]) |
Table 3
Decision matrix R3 provided by decision maker d3
|
|
|
|
| |
|
| ([s1, s4] , [s3, s5]) | ([s2, s4] , [s3, s6]) | ([s2, s3] , [s4, s5]) | ([s3, s4] , [s1, s5]) |
|
| ([s3, s6] , [s2, s5]) | ([s2, s6] , [s3, s5]) | ([s2, s5] , [s3, s6]) | ([s2, s4] , [s3, s5]) |
|
| ([s3, s6] , [s1, s4]) | ([s3, s5] , [s2, s6]) | ([s3, s5] , [s2, s3]) | ([s2, s6] , [s4, s5]) |
|
| ([s2, s3] , [s3, s5]) | ([s3, s4] , [s3, s5]) | ([s4, s6] , [s4, s5]) | ([s1, s5] , [s3, s4]) |
|
| ([s2, s4] , [s3, s6]) | ([s1, s5] , [s3, s6]) | ([s3, s4] , [s3, s5]) | ([s2, s5] , [s1, s3]) |
Step 2. The weighting vector v = (0.3, 0.5, 0.2) of decision maker is given. Let q = 3, the LIVqROFWA operator is utilized to aggregate all the decision matrices Rk (k = 1, 2, 3) into a collective decision matrix R, as shown in Table 4.
Table 4
Collective LIVqROF assessment information
|
|
|
|
| |
|
| ([s1.8765, s3.7612] , | ([s2.3973, s4.0000] , | ([s2.0000, s4.5433] , | ([s3.0000, s4.8418] , |
| [s3.0000, s4.6762]) | [s1.7617, s5.3128]) | [s2.2855, s3.8367]) | [s1.2311, s4.1826]) | |
|
| ([s2.7753, s5.6127] , | ([s2.6008, s5.5779] , | ([s2.8545, s5.5779] , | ([s3.4835, s5.7531] , |
| [s2.0000, s5.2811]) | [s2.1577, s4.2896]) | [s2.6564, s5.1857]) | [s3.0000, s4.4721]) | |
|
| ([s3.0000, s5.2560] , | ([s3.0802, s5.3706] , | ([s3.0000, s4.2529] , | ([s2.8545, s5.7611] , |
| [s1.7411, s5.5326]) | [s2.7663, s4.6382]) | [s1.1487, s2.6564]) | [s2.2974, s5.2811]) | |
|
| ([s1.8080, s3.0000] , | ([s3.0000, s4.8418] , | ([s2.4256, s4.4764] , | ([s2.3146, s5.4101] , |
| [s3.0000, s4.6762]) | [s3.0673, s4.6762]) | [s2.5946, s5.7852]) | [s2.1689, s5.0506]) | |
|
| ([s2.6008, s4.3664] , | ([s2.5316, s4.2529] , | ([s4.7083, s6.0774] , | ([s2.0000, s4.7567] , |
| [s2.4495, s5.4772]) | [s2.6564, s6.000]) | [s3.0000, s5.0000]) | [s2.7808, s4.7682]) |
Step 3. By using Equation (22), take q = 3, we get the criteria weight as:
Step 4. Take q = 3, calculate
4.3Comparative analyses
In this subsection, we compare the proposed weighted entropy measure model for LIVqROFSs with other decision tools VIKOR model for LIVqROFSs proposed by Khan et al. in [13] and TOPSIS model for LIVqROFSs proposed by Gurmani et al. in [38] to illustrate the effectiveness of our proposed method.
Steps of Khan’s approach are as under:
Step 1. Construct the decision matrices. For better comparison, we select the data in Tables 1, 2 and 3.
Step 2. The collective matrix is presented in Table 4 using the given expert weights.
Step 3. According to Table 4, we get the LIVqROFS positive ideal solution and LIVqROFS negative ideal solution respectively as:
Step 4. For better comparison, we give the criteria weight as:
Step 5. Calculate the distance between the LIVqROFS positive ideal solution r+ and the alternative
Step 6. Calculate the relative closeness coefficient of each alternatives as follows:
Step 7.Rank the relative closeness coefficients in descending order to select the best alternative.
Steps of Gurmani’s approach are as under:
In order to make the comparison result more reasonable, we chose the same data, so steps 1, 2, 3 and 4 are the same as Khan’s approach.
Step 5. Calculate the group utility measure Φi and individual regret measure yi of alternatives
Step 6. Calculate the compromise measure
Step 7. Rank the compromise measure in ascending order to select the best alternative.
The comparison results of the proposed approach and the existing approachs are shown in Fig. 1.
Fig. 1
The ranking of alternatives obtained by the three approaches.
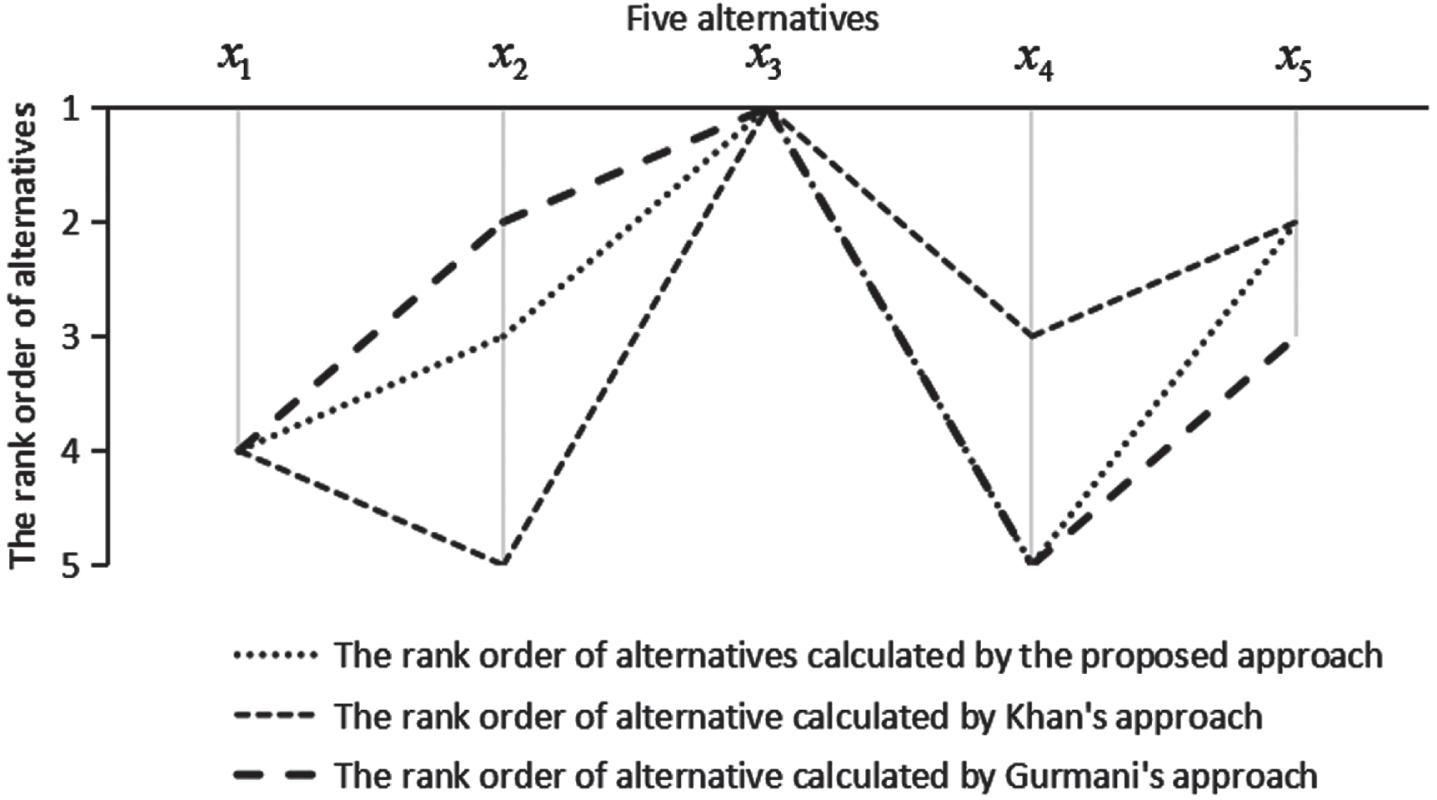
According to the optimal results of the three methods, there are some similarities among the three methods, but there are also differences among the three methods from the final ranking of the alternatives. The group decision making method based on weighted exponential entropy measure in LIVqROFS environment is more efficient, simple and consistent than the existing measures and methods to solve the decision problem.
5Conclusion
In this study, a new multi-attribute group decision making method is proposed under the linguistic interval-valued q-rung orthopair fuzzy environment. We propose novel entropy and distance measure for linguistic interval-valued q-rung orthopair fuzzy sets. The main innovations and advantages of this study are shown as follows:
(1) The axiomatic definitions of entropy and distance are proposed under the LIVqROF environment. It provides some important and reliable reference results for the subsequent research of complex information measures and distance measures in the LIVqROF environment.
(2) The proposed information measure is applied to the problem of multi-attribute decision making. An effective linguistic multi-attribute decision making model is established, which enriches the theory and method of qualitative decision making in the LIVqROF environment.
Theoretical analysis and numerical results show that the method is simple and intuitive without information loss. The model can be applied to medical diagnosis, personnel assessment, pollution treatment, quality evaluation and other fields. We will continue to extend the proposed method to complex decision information environment.
Conflicts of interest
I declare that I have no financial and personal relationships with other people or organizations that can inappropriately influence my work, there is no professional or other personal interest of any nature or kind in any product, service and/or company that could be construed as influencing the position presented in, or the review of, the manuscript entitled.
Funding
This work was supported by the Natural Science Foundation of Fujian Province (No. 2020J01576) and the Science and Technology Innovation Special Fund Project of Fujian agriculture and Forestry University (No. CXZX2020110A).
References
[1] | Zadeh L.A. , Fuzzy sets, Information and Control 8: (3) ((1965) ), 338–356. |
[2] | Atanassov K. , Intuitionistic fuzzy, Fuzzy Sets and Systems 20: (1) ((1986) ), 87–96. |
[3] | Atanassov K. , More on intuitionistic fuzzy sets, Fuzzy Sets and Systems 33: (1) ((1989) ), 37–46. |
[4] | Atanassov K. and Gargov G. , Interval-valued intuitionistic fuzzy sets, Fuzzy Sets and Systems 31: ((1989) ), 343–349. |
[5] | Zadeh L.A. , The concept of a linguistic variable and its applicationto approximate reasoningI, Information Sciences 8: (3) ((1975) ), 199–249. |
[6] | Zhang H.M. Linguistic intuitionistic fuzzy sets and application in MAGDM, Journal of Applied Mathematics (2014), Article ID 432092. |
[7] | Yager R.R. , Pythagorean membership grades in multicriteria decision making, IEEE Transactions on Fuzzy Systems 22: (4) ((2014) ), 958–965. |
[8] | Yager R.R. , Generalized orthopair fuzzy sets, IEEE Transactionson Fuzzy Systems 25: (5) ((2017) ),1222–1230. |
[9] | Garg H. , Linguistic Pythagorean fuzzy sets and its applications inmultiattribute decision-making process, International Journal of Intelligent Systems 33: (6) ((1234) ), 1234–1263. |
[10] | Lin M.W. , Li X.M. and Chen L.F. , Linguistic q-rung orthopair fuzzysets and their interactional partitioned Heronian mean aggregation operators, International Journal of Intelligent Systems 35: (2) ((2020) ), 217–249. |
[11] | Garg H. and Kumar K. , Linguistic interval-valued Atanassovintuitionistic fuzzy sets and their applications to group decisionmaking problems, IEEE Transactions on Fuzzy Systems 27: (12) ((2019) ), 2302–2311. |
[12] | Garg H. , Linguistic interval-valued Pythagorean fuzzy sets and theirapplication to multiple attribute group decision-making process, Cognitive Computation 12: (1) ((2020) ), 1313–1337. |
[13] | Khan M. , Khan A.S. , Khan A.I. , Mashwani W.K. and Hussain F. , Linguistic interval valued q-rung orthopair fuzzy TOPSIS method fordecision making problem with incomplete weight, Journal of Intelligent & Fuzzy Systems 40: (3) ((2021) ), 4223–4235. |
[14] | DeLuca A. and Termini S. , A definition of non-probabilistic entropyin the setting of fuzzy sets theory, Information and Control 20: ((1972) ), 301–312. |
[15] | Shannon C.E. , A mathematical theory of communication, Bell System Technical Journal 27: (3) ((1948) ), 379–423. |
[16] | Hooda D.S. , Mishra A.R. and Jain D. , On generalized fuzzy mean codeword lengths, American Journal of Applied Mathematics 2: (4) ((2014) ), 127–134. |
[17] | Hooda D.S. and Mishra A.R. , On trigonometric fuzzy information measures, ARPN Journal of Science and Technology 5: (3) ((2015) ), 145–152. |
[18] | Mishra A.R. , Jain D. and Hooda D.S. , On fuzzy distance and induced fuzzy information measures, Journal of Information and Optimization Sciences 37: (2) ((2016) ), 193–211. |
[19] | Mishra A.R. , Jain D. and Hooda D.S. , On logarithmic fuzzy measures of information and discrimination, Journal of Information and Optimization Sciences 37: (2) ((2016) ), 213–231. |
[20] | Mishra A.R. , Hooda D.S. and Jain D. , Weighted trigonometric and hyperbolic fuzzy information measures and their applications inoptimization principles, International Journal of Computer and Mathematical Sciences 3: (7) ((2014) ), 62–68. |
[21] | Mishra A.R. , Hooda D.S. Divya Jain On exponential fuzzymeasures of information and discrimination, International Journal of Computer Applications 119: (23) ((2015) ), 1–7. |
[22] | Pal N.R. and Pal S.K. , Object background segmentation using new definitions of entropy, IEEE Proceedings 136: (4) ((1989) ), 284–295. |
[23] | Burillo P. and Bustince H. , Entropy on intuitionistic fuzzy sets andon interval-valued fuzzy sets, Fuzzy Sets Systems 78: (3) ((1996) ), 305–316. |
[24] | Liu X.D. , Zheng S.H. and Xiong F.L. , Entropy and subsethood forgeneral interval-valued intuitionistic fuzzy sets, Springer Berlin Heidelberg 36: (13) ((2005) ), 42–52. |
[25] | Li Y.X. , Tang B.Z. and Yi Y.M. , A novel complexity-based mode feature representation for feature extraction of ship-radiated noiseusing VMD and slope entropy, Applied Acoustics 196: (2022), 108899. |
[26] | Li Y.X. , Mu L.X. and Gao P.Y. , Particle swarm optimizationfractional slope entropy: a new time series complexity indicator forbearing fault diagnosis, Fractal and Fractional 6: (7) ((2022) ), 345. |
[27] | Zhang Q.S. and Jiang S.Y. , Relationships between entropy andsimilarity measure of interval-valued intuitionistic fuzzy sets, International Journal of Intelligent Systems 25: ((2010) ), 1121–1140. |
[28] | Zhang Q.S. , Jiang S.Y. , Jia B.G. and Luo S.H. , Some information measures for interval-valued intuitionistic fuzzy sets, Information Sciences 180: (24) ((2010) ), 5130–5145 |
[29] | Wei C.P. , Wang P. and Zhang Y.Z. , Entropy, similarity measures ofinterval-valued intuitionistic fuzzy sets and their applications, Information Sciences 181: ((2011) ), 4273–4286. |
[30] | Wei C.P. and Zhang Y.Z. , Entropy measures for interval-valuedintuitionistic fuzzy sets and their application in groupdecision-making, Mathematical Problems in Engineering (1), ((2015) ), 1–13. |
[31] | Rani P. , Jain D. and Hooda D.S. , Shapley function based interval-valued intuitionistic fuzzy VIKOR technique for correlative multi-criteria decision making problems, Iranian Journal of Fuzzy Systems 15: (1) ((2018) ), 25–54. |
[32] | Kumar R. , Saini N. Gandotra N. , Novel Pythagorean fuzzy entropyand its application based on MCDM for ranking the academic institutions, AIP Conference Proceedings 2357: (1) ((2022) ), 1–6. |
[33] | Sonia , Tiwari P. Gupta P. Novel distance, similarity andentropy measures for interval valued intuitionistic fuzzy soft set, Journal of Intelligent & Fuzzy Systems ((2022) ), 1–20. |
[34] | Ohlan A. , Novel entropy and distance measures for interval-valued intuitionistic fuzzy sets with application in multi-criteria group decision-making, International Journal of General Systems 51: (4) ((2022) ), 413–440. |
[35] | Bordogna G. , Fedrizzi M. and Passi G. , A linguistic modeling ofconsensus in group decision making based on OWA operator, IEEE Transactions on Systems, Man, and Cybernetics 27: (1) ((1997) ), 126–133. |
[36] | Xu Z.S. , A method based on linguistic aggregation operators for group decision making with linguistic preference relations, Information Sciences 166: ((2004) ), 19–30. |
[37] | Liu P. and Qin X. , A new decision-Making method based oninterval-valued linguistic intuitionistic fuzzy information, Cognitive Computation 11: ((2018) ), 125–144. |
[38] | Gurmani S.H. , Chen H.Y. and Bai Y.H. , The operational properties of linguistic interval valued q-Rung orthopair fuzzy information and its VIKOR model for multi-attribute group decision making, Journal of Intelligent and Fuzzy Systems 41: (6) ((2021) ), 7063–7079. |
[39] | Bustince H. and Burillo P. , Correlation of interval-valuedintuitionistic fuzzy sets, Fuzzy Sets and Systems 74: (1995), 237–244. |
[40] | Düenci, M. , A new distance measure for interval valued intuitionistic fuzzy sets and its application to group decision making problems with incomplete weights information, Applied Soft Computing 41: ((2016) ), 120–134. |
[41] | Pal N.R. and Pal S.K. , Entropy: a new definition and its applications, IEEE Transactions on Systems, Man and Cybernetics 21: (5) ((1991) ), 1260–1270. |
[42] | Fan J.L. and Xie, W.X. , Distance measure and induced fuzzy entropy, Fuzzy Sets and Systems 104: (2) ((1999) ), 305–314. |


