
Development of a novel massage platform for medical training
Abstract
BACKGROUND:
Traditional Chinese medicine (TCM) massage has a better effect on treating infant diarrhea compared to medical treatment. The TCM doctors need to be trained to master professional massage techniques. Traditional Chinese massage training relies on the students’ understanding ability, and cannot accurately record the students’ operating information. This situation leads to insufficient clinical massage skills of the students.
OBJECTIVE:
This paper proposes a novel massage training platform to quantitatively perceive the massage techniques of students.
METHODS:
The paper proposed two types of flexible array sensors, which are arranged and placed into the bionic baby according to the position of the human acupoints. The massage techniques of the training object can be analyzed and evaluated during the massage process by studying the voltage from pressure sensors when the participants massage the bionic infant.
RESULTS:
A medical student was invited to conduct the massage training experiment, and the massage information included the operating strength, massage frequency and the massage direction, which were recorded and analyzed through the training platform.
CONCLUSION:
The platform can perceive the parameters related to the massage technique of students and can be used for medical training.
1.Introduction
Infant diarrhea is a typical disease that results from the immature digestive system of the infant, which occurs in infants between the ages of one and two [1, 2]. Because infants are weak and easily react to drugs, it is not advisable to use Western medicine to treat diarrhea [3]. In contrast, infant massage such as the traditional Chinese medicine (TCM) method is convenient, quick and effective, and solves the problem of infants’ difficulty of swallowing drugs and fear of injection, and the massage is a kind of treatment that can be performed by the parents.
In the process of massage treatment for infants, because the baby’s body tissue is delicate, the massage technique must be gentle, uniform and stable, and doctors need standardized training to master professional operation methods. In traditional massage training methods, the teacher provides one-to-many services to the students in the classroom [4, 5]. Due to the limit of the attention and energy of the teachers, it is not possible to provide all students with detailed and comprehensive guidance. This situation leads to blind training for students, and it is more difficult to improve their massage techniques [6, 7, 8, 9, 10, 11].
On the whole, traditional massage training relies on students’ comprehension ability, lacking systematic, standardized and accurate training means. The assessment of the student’s massage technique relies on the subjective experience of the doctor which cannot be quantified. At the same time, the baby’s physiological structure is not yet mature, and there are ethical restrictions that prevent babies from being used as a training platform for trained doctors. Therefore, it is of great significance to develop a new TCM massage training platform for infants to meet the standardized training needs of doctors.
With the promotion and application of detection technology, the research on robot-assisted medical training platforms has been carried out. As early as 1960, Peter Safar from Norway developed a robot for artificial respiration training (Resusci-Anne) [12, 13], and it was the first robot that was used in medical training. Then the Takanishi Laboratory of Waseda University developed a series of robots for neurological examination and education training [14, 15, 16, 17]. This series of robots could fully simulate the human motor nervous system to help the students master the examination skills and understand various diseases. At the same time, the laboratory also developed a training robot that can simulate the opening and closing process of the mandible of patients and provide human airway examination training [18, 19]. Saverio Farsoni from the University of Ferrara designed an ultrasound training system to provide high-quality training scenarios to improve the effectiveness of ultrasound education [20]. Shun Ishikawa from Nagoya University developed a training robot that helps therapists perform manual examinations of human joints [21]. The robot allows students to touch and feel real human bodies, thereby providing a perception of the complex movements of the joints and bone of the human body.
Research on massage training platforms is mainly concentrated in China. The Shanghai University of Traditional Chinese Medicine has designed an analyzer for Chinese medicine massage manipulation [22]. It can determine the correctness of the manipulation method by analyzing the trajectory of the manipulation point, but the scope of application of the analyzer is narrow. Xing designed a massage teaching device that can convert the mechanical signal of massage into a current signal [23]. The change characteristics of the speed and strength of the massage technique can be calculated by analyzing the change law of the mechanical curve of the manipulation technique. However, the device cannot accurately simulate the human body’s mechanical characteristics and provide a more realistic massage touch sense. Tao Wang introduced a robot massage evaluation system based on the fuzzy set theory [24]. The system consists of a human body model and a pressure collection device that collects pressure information from the surface of the human body and makes an assessment, but it is not suitable for pediatric massage. Zheng developed a glove massage information collection device and pneumatic human organ simulation device [25], which can simulate the chest structure of different human bodies, but it can only collect pressure data and cannot analyze the frequency and direction of the massage.
Figure 1.
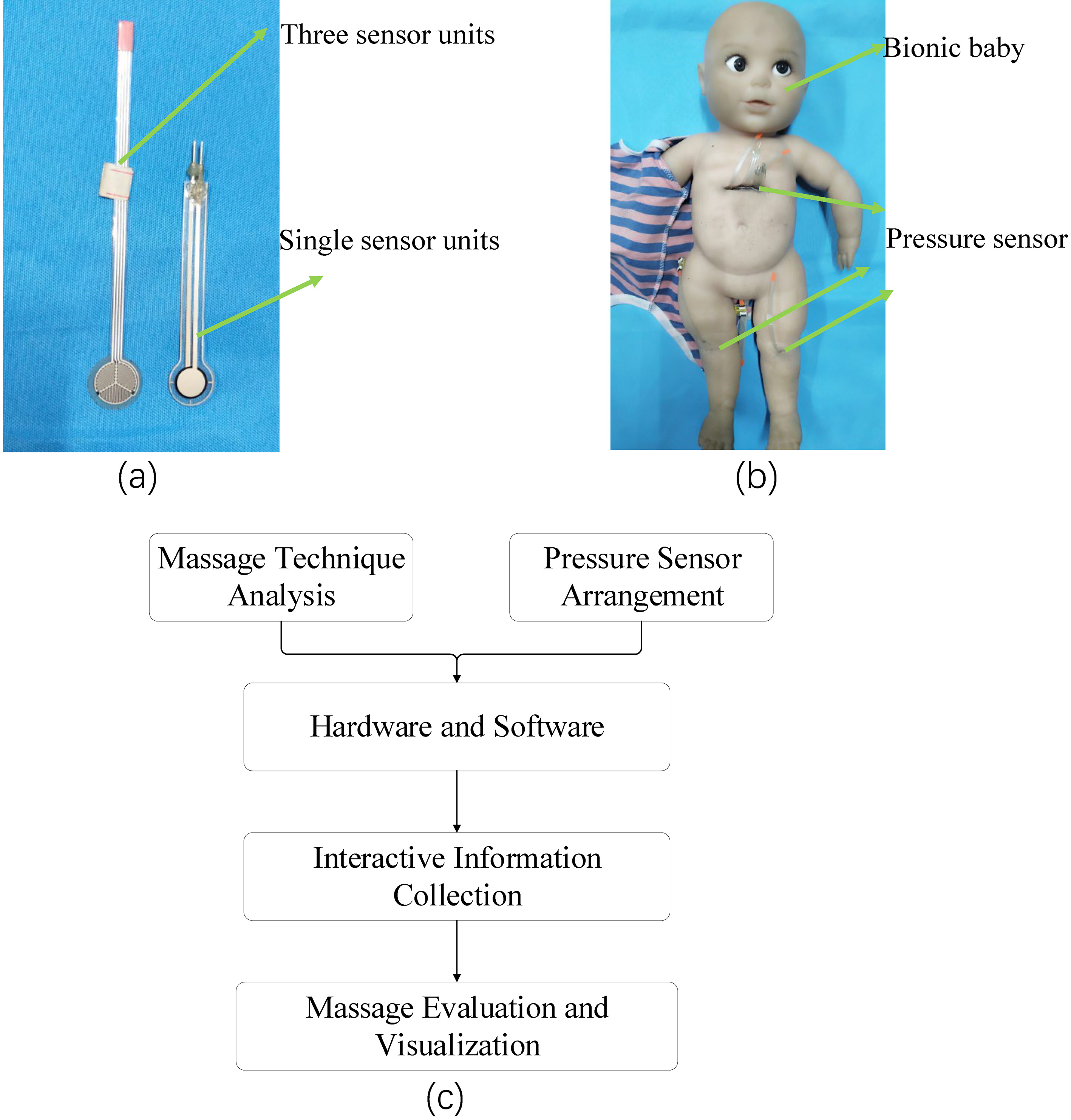
System overview. (a) The training platform, (b) Pressure sensors, (c) The system chat.
The current medical training platforms are mainly used for diagnosis and treatment of adult diseases, while research on infant massages have not been reported in China or abroad. Therefore, this paper proposes a novel massage training platform to standardize massage training.
The paper is structured as follows: Section 2 provides a detailed description of the proposed system configuration. Section 3 presents the experimental results. The performance and potential improvements of the proposed system are discussed in Section 4.
2.Methods
2.1System overview
The system includes the simulated training platform, as shown in Fig. 1a, the film pressure sensor, as shown in Fig. 1b, and the data acquisition system and graphical user interface developed by C++ builder. The system is designed to obtain the pressure and massage frequency and massage order of the training object during the massage process and to analyze and evaluate the massage technique of the object. This is done by studying the voltage from pressure sensors when the participants are massaging the bionic infant. As shown in Fig. 1c, the system flow includes Chinese medicine massage analysis and pressure sensor layout, hardware circuit design and software programming, massage evaluation and visualization. Each of these acquisition and processing steps is described in the following section.
2.2The technique of Chinese medicine massage
According to the literature on Chinese medicine methods for treating infant diarrhea [26], diarrhea caused by digestive tract in infants can be massaged by Dantian, Guiwei, Piyu, Zhongwan, Zusanli and Tianshu. The common skills of traditional Chinese massage for infants includes pushing, kneading, pressing and rubbing. During the massage, doctors often use the middle finger or palm to knead Dantian, and the middle finger or thumb to knead Guiwei. For the massage method of Zhongwan, the doctor uses the palm or four fingers to rub Zhongwan in a clockwise direction. In the massage process of Piyu, the doctor’s double thumbs are kneaded on both sides of the baby on Piyu. The doctor also kneads Tianshu with the index and middle fingers, and kneads Zusanli with the thumb. In the massage process of Changyu, the doctor uses the tip of the index finger and middle finger to slowly press the Changyu located on the baby’s back. The massage techniques for the infant are shown in Fig. 2.
Figure 2.
The simplified human motion model.
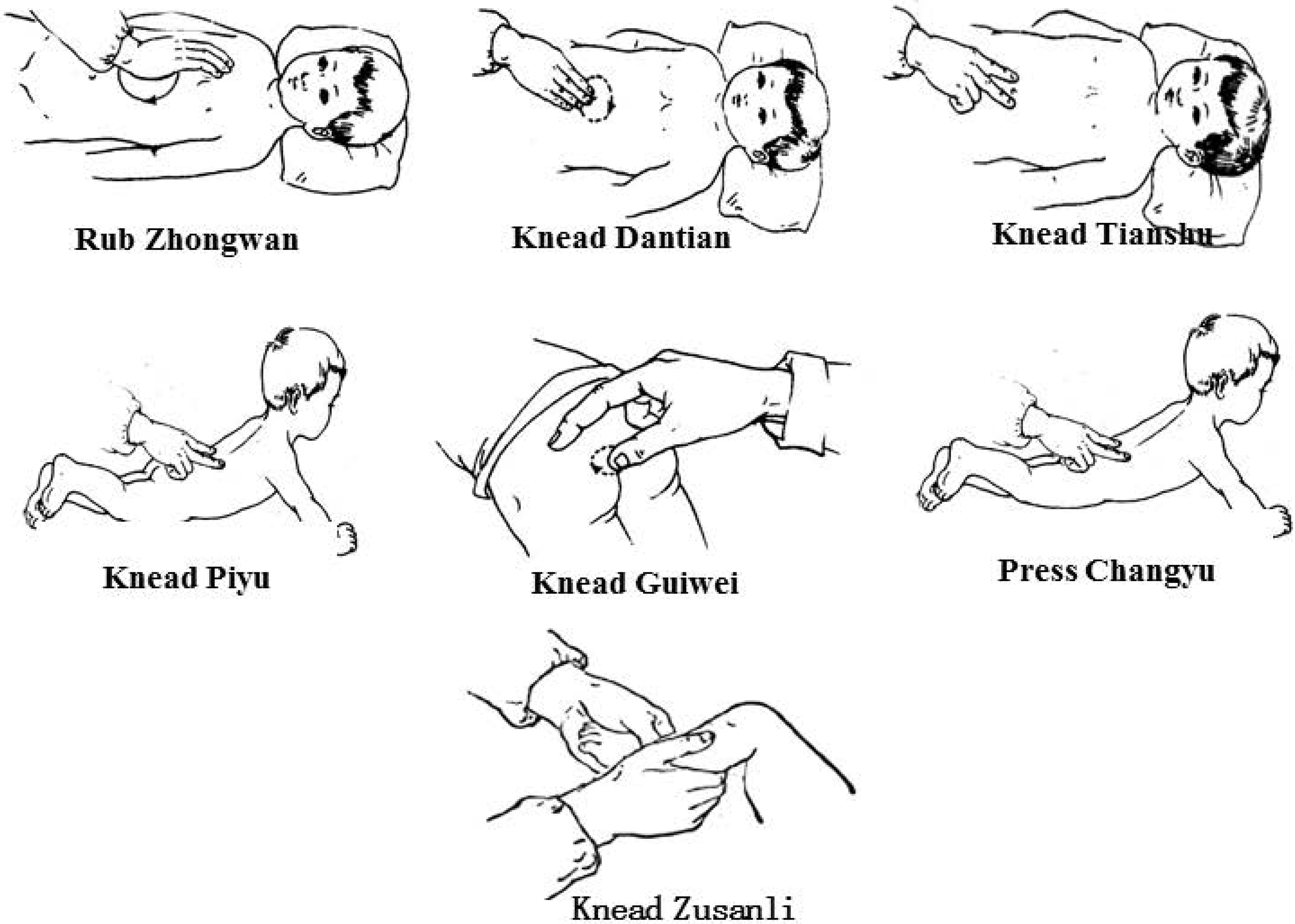
The basic requirements for infant massage are: equality, softness, smoothness and steadiness, furthermore, the massage intensity and the procedures of operation are essential. Based on the above analysis of the common techniques of infant massage, the critical point of the massage can be summarized as the following parameters: massage strength, massage time, massage speed and massage direction.
2.3Project design
This section includes four parts: 1) sensor selection and distribution, 2) hardware design, 3) software design, and 4) system framework.
2.3.1Sensor selection and distribution
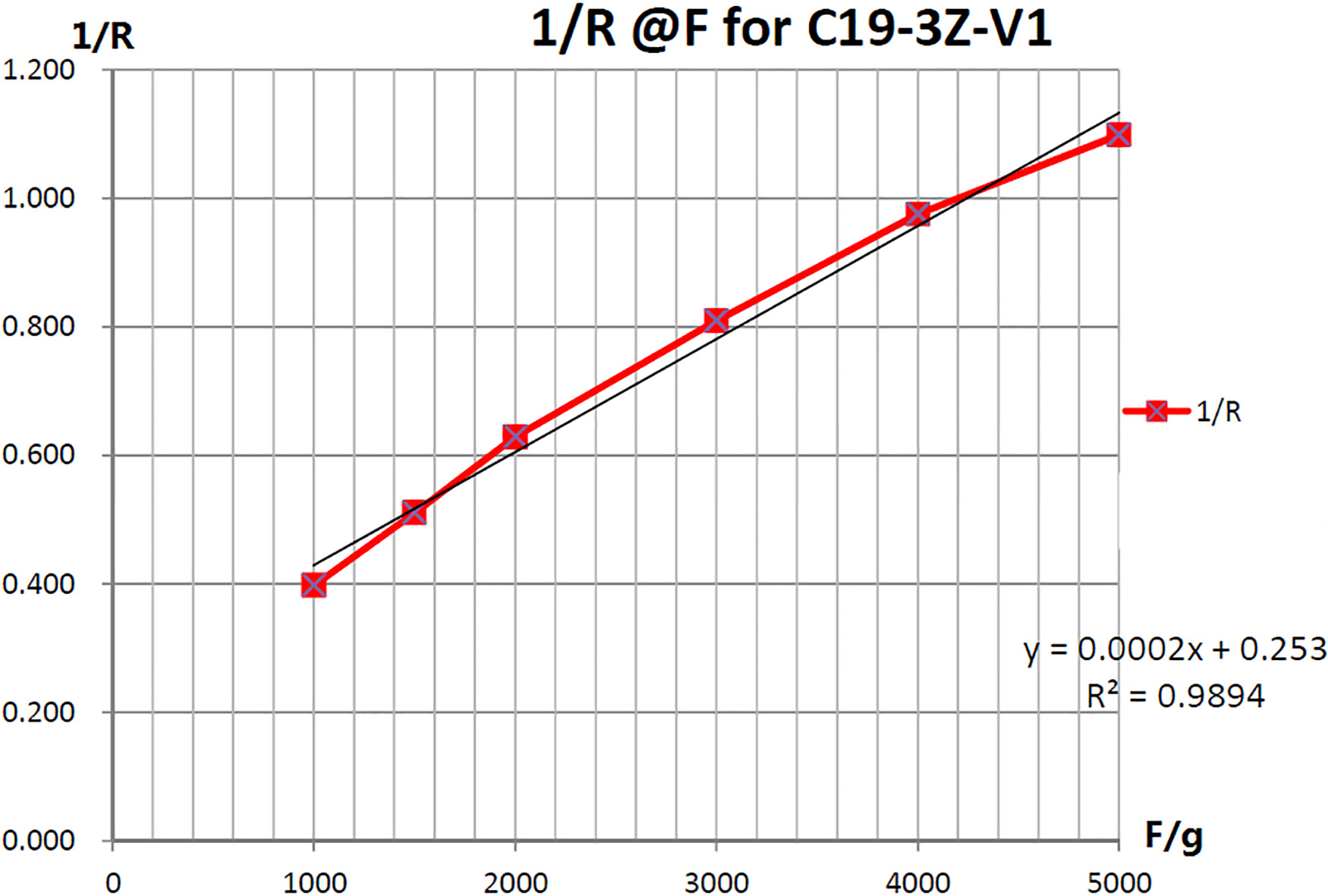
By analyzing the important acupuncture points and the basic operation methods of TCM massage, the distributed flexible array pressure sensor is used to record massage data for differences in massage techniques at different acupoints in infants. This paper introduces two kinds of sensors, the force exerted by the doctor by pressing is collected by a single-area sensor which containing a single sensing unit, and the magnitude, direction and frequency of the force applied by the doctor through the kneading and rubbing are collected by a three-area sensor with multiple sensing units. Note: The three areas share a power line, which can equivalent to a parallel circuit. The sensors are shown in Fig. 3. The characteristic of the pressure sensors is that its resistance value changes with the pressure applied to the surface. The relationship between resistance and pressure changes is shown in Fig. 4.
Figure 3.
Sensors for the massage platform.
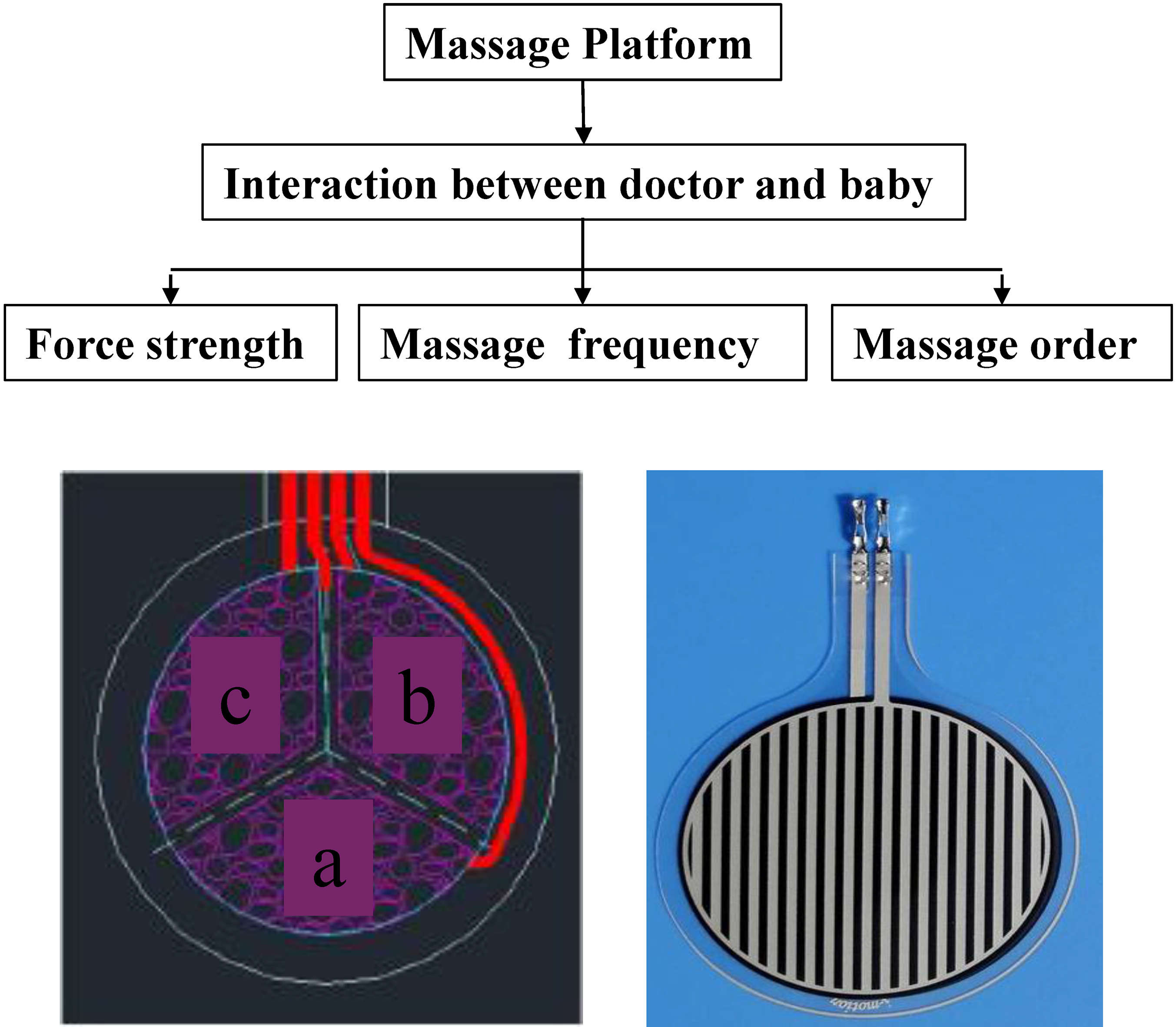
Figure 4.
Curve of the characteristics of the sensor.
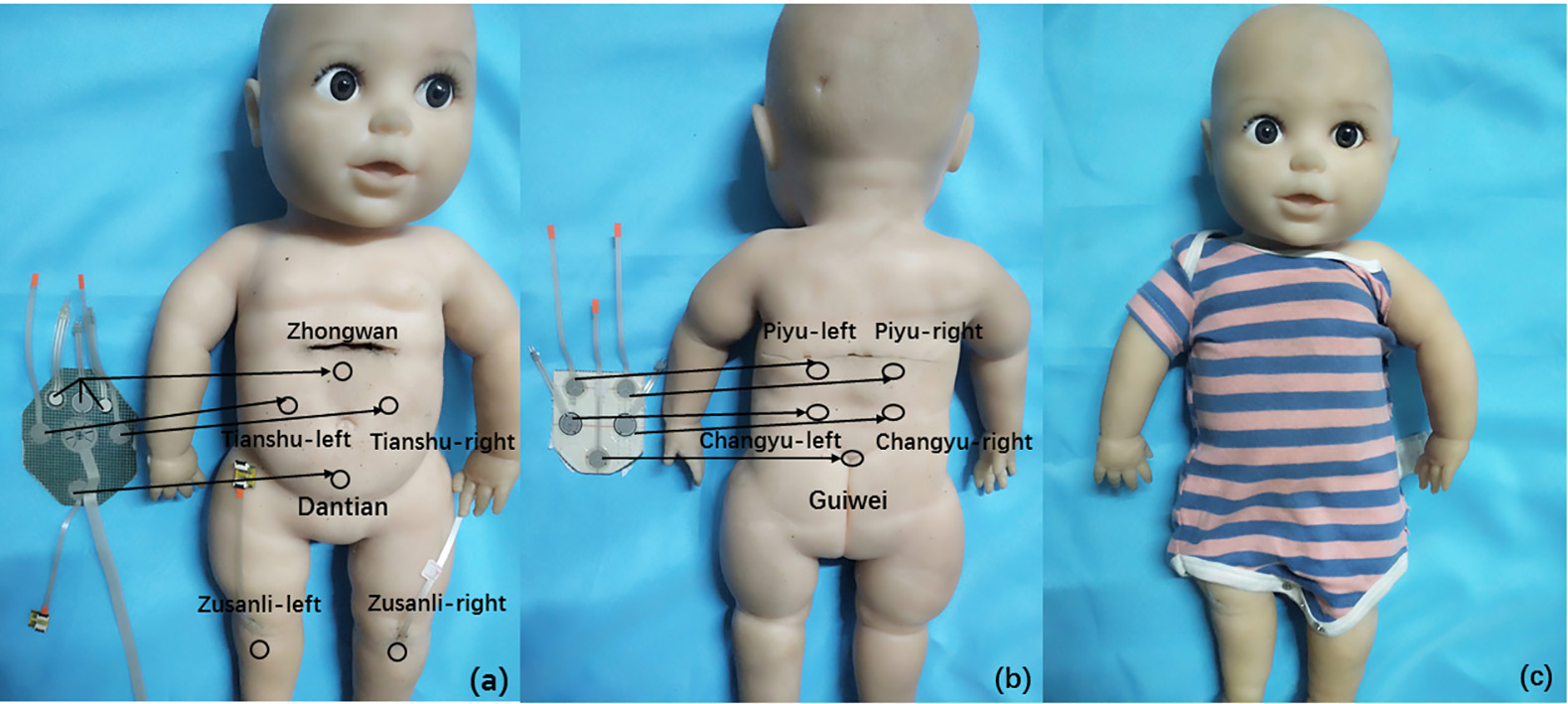
In order to improve the training efficiency of massage, the positions of the sensors are pre-arranged and placed inside the baby model. Because the structure of the robot body is very similar to a real baby, a real massage environment is created when the sensors are placed in the corresponding position of the human acupoint. This way, the student does not know the position of the sensors and the massage result is reflected more objectively. Thirteen sensors which include 29 sensing units are placed in the infant model for collecting massage data. Among them, the three-area sensor is respectively used on Zusanli, Piyu, Guiwei and Tianshu to collect the data of kneading, three single-area sensors are used on Zhongwan to collect the data of rubbing, a three-area sensor is used to collect the data of rubbing on Dantian, and two single-area sensors are used on Changyu to collect the data of pressing. The arrangement of the sensor is shown in Fig. 5.
Figure 5.
Pressure sensor distribution. (a) Acupuncture points on the abdomen and lower limbs, (b) Acupuncture points on the back, (c) The baby model.
2.3.2Hardware design
The pressure sensor selected in this paper is equivalent to a variable resistor. The resistance value of the sensor will decrease with the increase of the pressure on the sensor surface. According to Ohm’s law, the voltage load on the sensor changes with the change of its resistance. So, the bleeder chain can be used to convert the detected pressure into the voltage signal. A total of 29 sensing units were placed in the infant model, so 29 bleeder chains were connected in parallel to measure the voltage of each sensing unit. Since the structure of each sensor is similar, only the application circuit of a single sensing unit is shown in Fig. 6. In the figure, R1 presents the reference resistor, Rs presents the resistance of the sensor. In this circuit, the input voltage is 5 V and the sensitivity of the measurement circuit can be changed by changing the value of R1. The voltage corresponding to the pressure is:
Figure 6.
Electric schematic diagram.
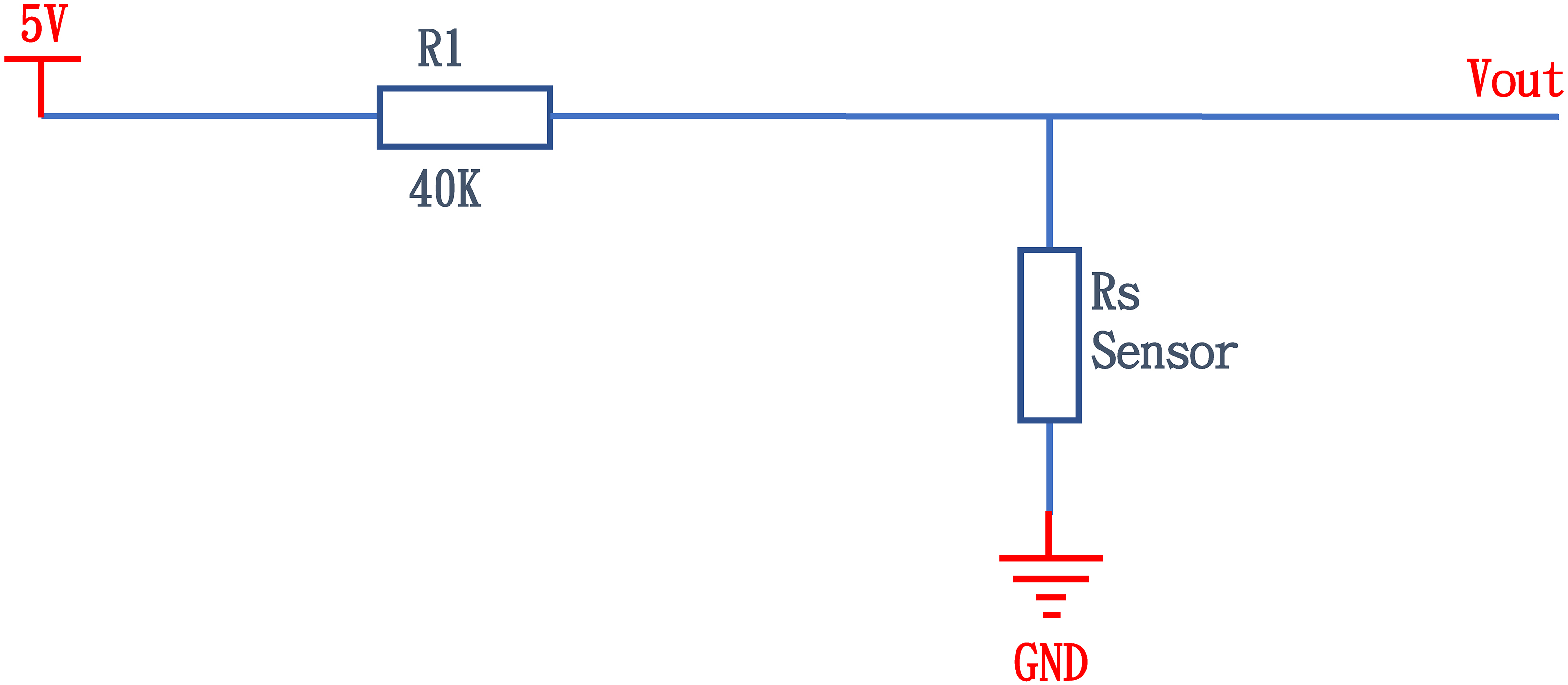
(1)
The
At the same time, in order to reduce the interference of the input voltage, a filter circuit is added at the input end of the acquisition circuit board. The circuit is shown in Fig. 7.
Figure 7.
Electric schematic diagram.
2.3.3Software design
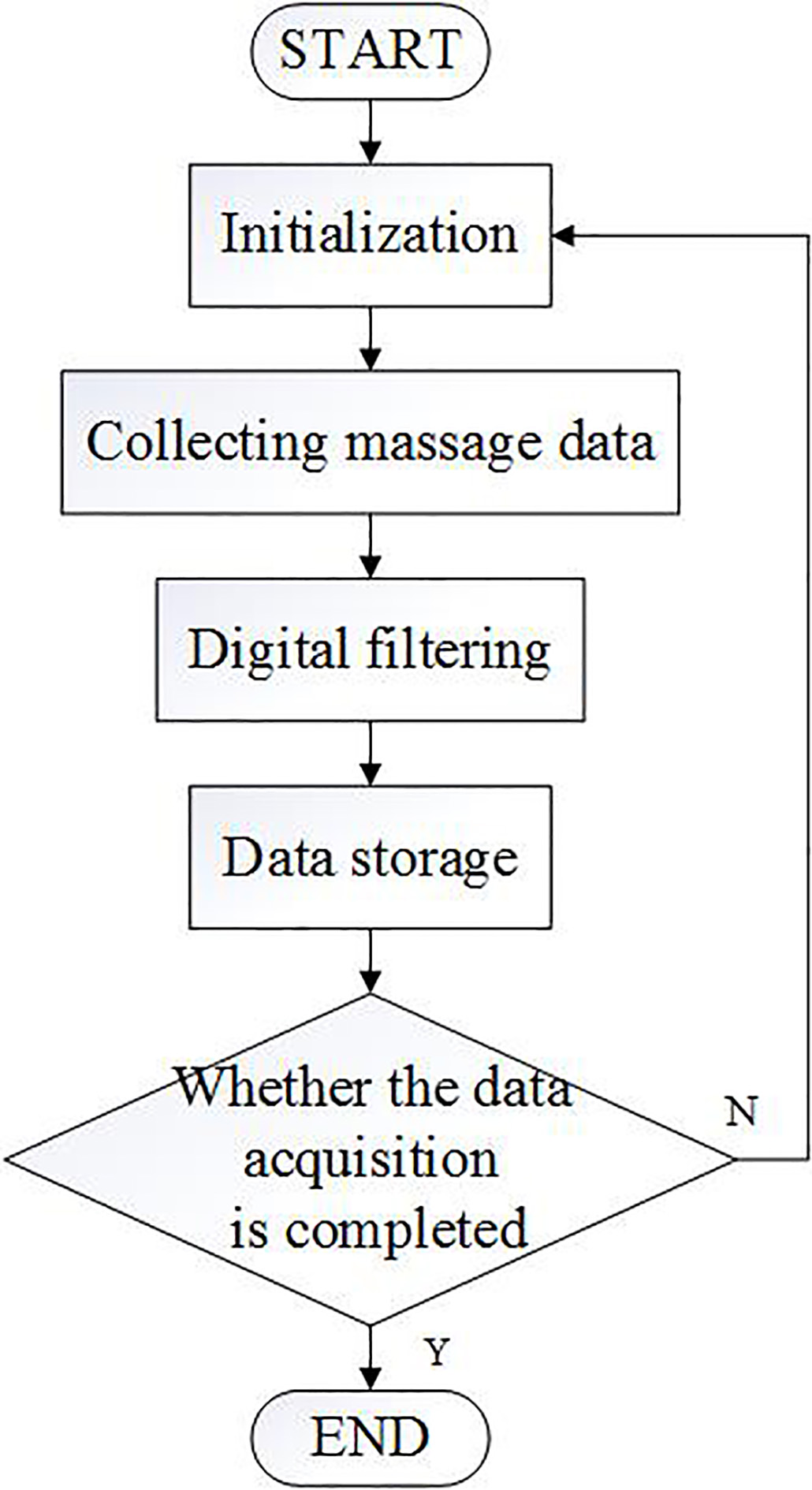
The massage training system needs to receive the data of the pressure acquisition module and process it. The function of the acquisition circuit introduced in the previous section is to convert the pressure value into the voltage signal. Then the obtained voltage value is discretized by AD acquisition card, and the discrete voltage signal can be saved as cxv data through serial port. The AD conversion is realized by ADT880 and transmitted the data to the host computer via PC/104 bus for data processing. The ADT880 is a data acquisition board manufactured by SBS Co., Ltd., with a sampling speed up to 200 KHz. The software of the massage platform is used to control ADT880 to realize AD conversion, data processing and data transmission. The collection process of massage data is shown in Fig. 8.
Figure 8.
Collection process of the massage data.
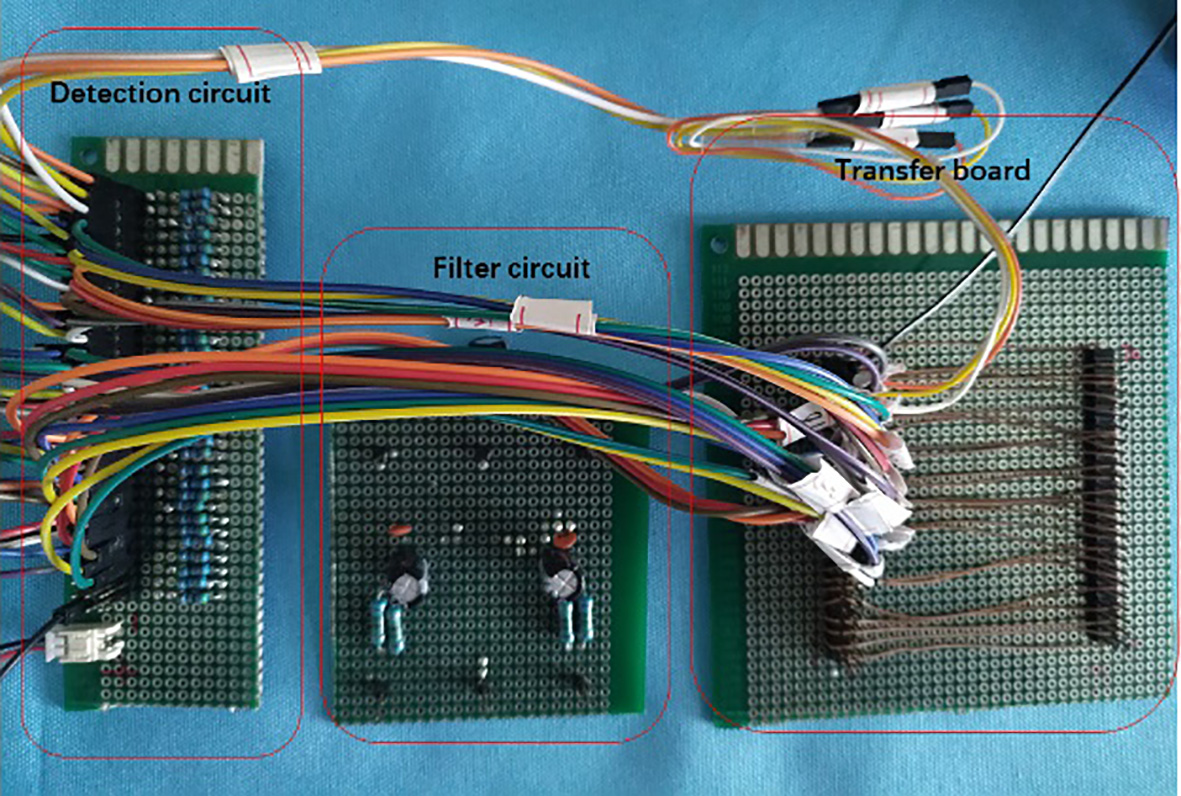
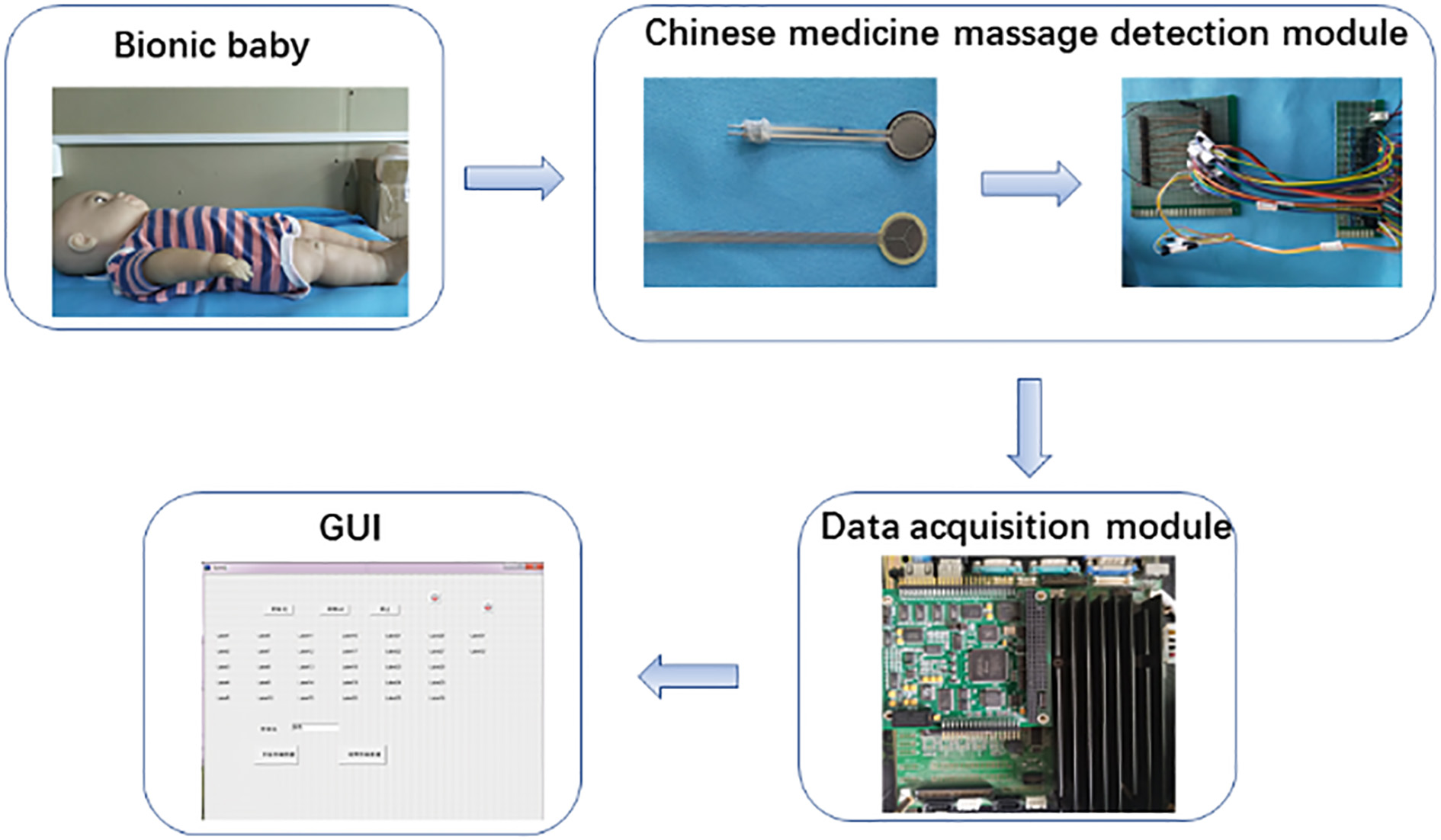
2.3.4System framework
The novel massage training platform is mainly composed of four parts, which include the bionic baby, the Chinese medicine massage detection module, the data acquisition module and the GUI. The bionic baby is made up of bionic materials, and its size, skin texture and distribution of important acupoints are similar to real babies. The TCM massage detection system is composed of flexible array pressure sensors distributed on the important acupoints of the simulated infant and electronic circuits. The data acquisition module is used to collect the output voltage of the detection module and display it on the Graphical User Interface (GUI). The framework of the training robot is shown in Fig. 9.
Figure 9.
The framework of the training platform.
During the training process, the teacher runs the training system and the students perform massage training on the baby model. When there is an interaction between the student and the baby model, the resistance value of the pressure sensor will change due to the change of force applied to the baby’s skin. Then the massage detection module will output different voltages under the action of the voltage divider circuit, and this voltage value directly reflects the change of interaction between the student and the baby. The voltage data can be saved by setting the sampling frequency of the data acquisition module in the GUI.
2.4Evaluation theory of the massage technique
The effect of the massage largely depends on the strength of the applied force. The baby’s body is weak, so the baby’s skin tissue may be damaged when the massage force is too strong. At the same time, the massage technique for different acupoints is not the same, and the doctor should change the massage strength according to the baby’s response. The pressure sensor used in this system can change the resistance according to the magnitude of the massage force. Therefore, the range of the voltage value obtained by the acquisition system can directly reflect the force applied by the student.
There is a saying in TCM massage called “Turn for complement, reverse for leakage”, meaning to promote the health of the baby by clockwise massage and to treat diarrhea by counterclockwise massage. The three-area sensor selected in this paper has three sensing units. When the students use the Kneading and Rubbing massage technique, we can determine the massage order by looking at the area where the voltage signal appears. For example, the direction of massage is counterclockwise when the signal appears first in sensing unit-a and then in sensing unit-b, and the direction of the massage is counterclockwise conversely.
Figure 10.
The framework of the training platform.

The frequency of massage also plays an important role in the treatment of diarrhea. The doctor’s fingers or hands should not leave the surface of the infant during the massage. The massage frequency of the students can be determined by the duration and frequency of the voltage signal of each sensing unit.
Each sensing unit of the sensor is subjected to pressure during the massage process of the student by using Rubbing or Kneading; therefore, there are multiple sensing unit voltage values in the same sampling period. In order to clearly express the situation of each acupuncture point, the minimum value of multiple voltage values in the same sampling period is calculated. The sensing unit corresponding to the minimum value also shows the maximum stress point, which indicates the position of the student’s finger or palm on the baby model. In this manner, the students’ massage technique can be reflected by each sensing unit with the above theories.
3.Results and discussion
To test the effectiveness of the training platform, a medical student is invited to conduct the massage technology training experiment. In order to ensure the rigor of the experiment, the subject learns the relevant theoretical knowledge of the massage in advance. Moreover, the subjects has to do the massage training via the infant model without knowing the specific location of the sensor. The experimental environment is shown in Fig. 10. By means of MATLAB, data fitting of the collected voltage values is carried out to obtain the change diagram of voltage-time as well as the change diagram of voltage-sensor unit. The quantitative analysis of the doctor’s massage data can be realized by analyzing the experimental data based on the evaluation method introduced in Section 2.4.
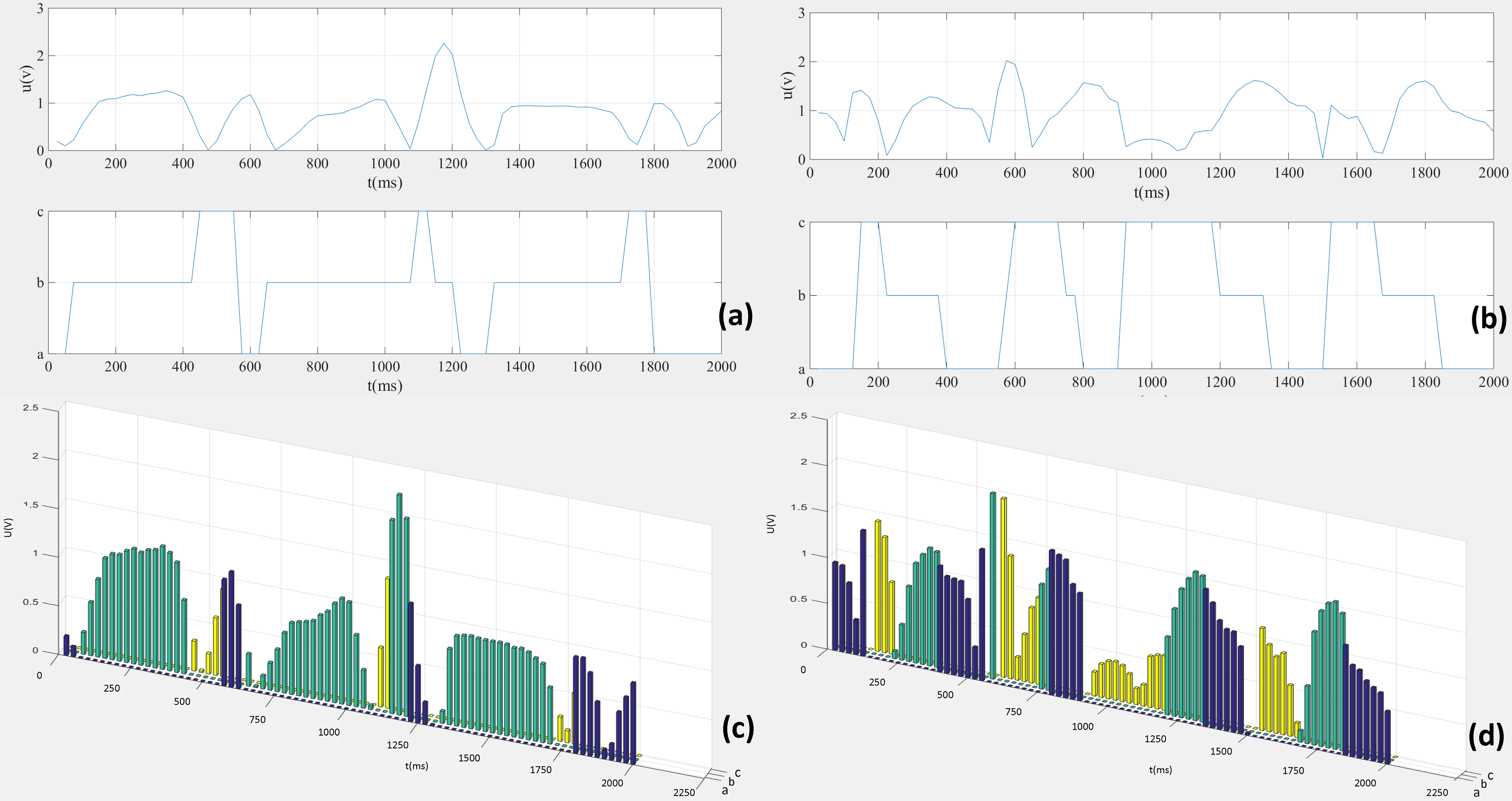
The AD sampling period is set as 25 ms in GUI, and the sampling period becomes 125 ms after data filtering. The student uses Kneading to massage Tianshu, and the experimental data are recorded in Fig. 11. As shown in this figure, the voltage range of the Tianshu-left and the Tianshu-right is 0–2, and some of the measured voltage values are close to 0. This indicates that the intensity of massage on Tianshu is heavy, which may cause pain to the real baby. The voltage value measured on Tianshuo-left appears first in the sensing unit-a, then appears in the sensing unit-b and the sensing unit-c, and the direction of the massage is counterclockwise. The voltage value measured on Tianshu-right appears in the sensing unit-a first, then in the sensing unit-c and the sensing unit-b, and the direction of massage is clockwise. The massage direction of the acupoints on both sides of the baby is inconsistent, which does not meet the needs of treatment of diarrhea. At the same time, the voltage signal distribution of each sensing unit in Tianshu-left is uneven, indicating that the student applied uneven force during the massage. Furthermore, the frequency of measurement voltage measured on Tianshu-left is higher, indicating that the massage frequency for the two acupoints is inconsistent.
Figure 11.
The training data of Tianshu. (a) Training data of Tianshu-left, (b) Training data of Tianshu-right, (c) Histogram of Tianshu-left, (d) Histogram of Tianshu-right. Note: a presents the sensing unit-a, b presents the sensing unit-b, and c presents the sensing unit-c.
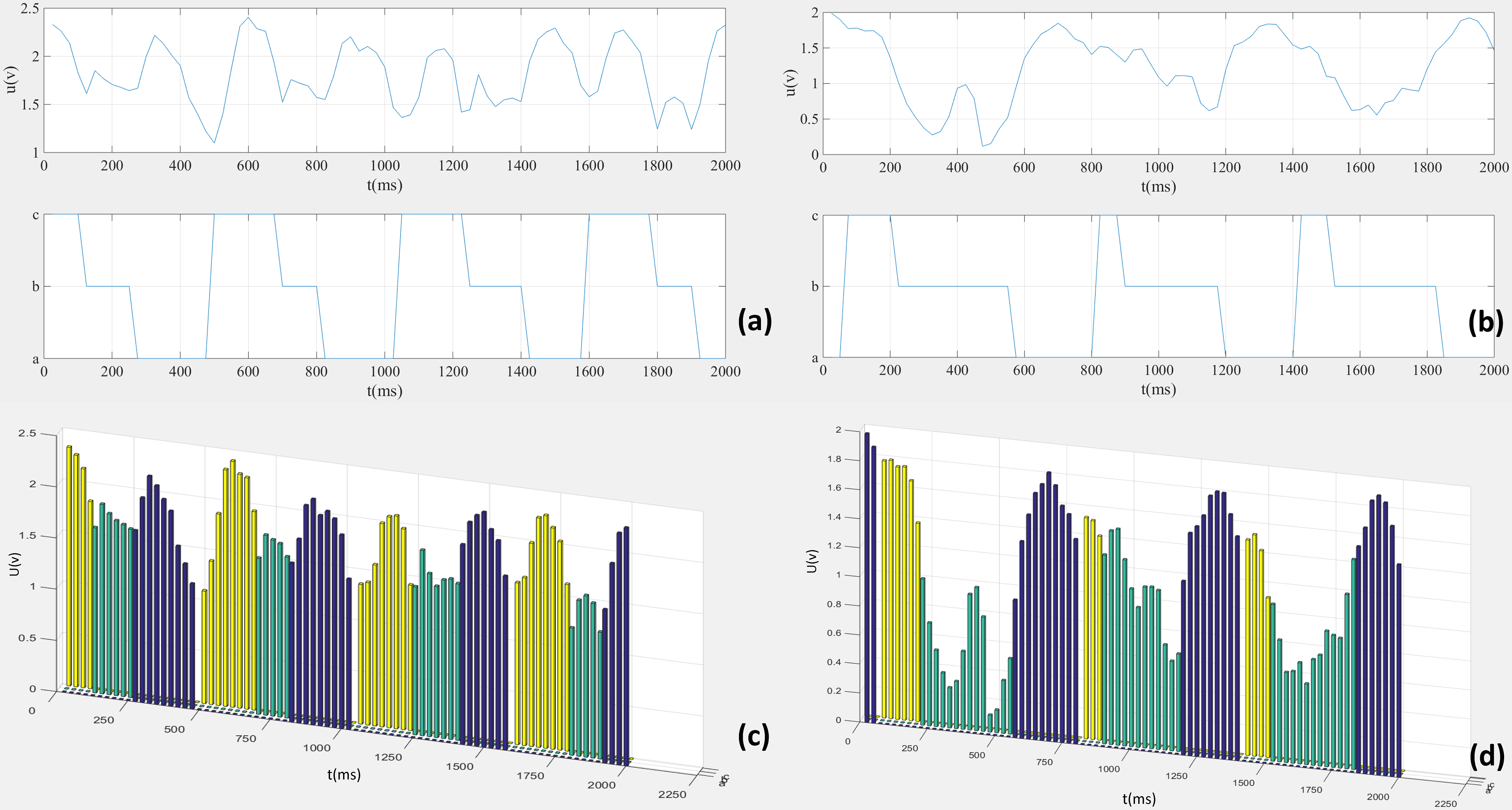
The experimental data of Zusanli are shown in Fig. 12. The voltage range measured on Zusanli-left and Zusanli-right is 0–2.5, and the measured voltage value on Zusanli-left is close to 0, indicating that the massage force applied by the student on Zusanli-left is strong. Comparing the order of the voltage values measured on the Zusanli-left and Zusanli-right, we found that the massage directions of the two acupuncture points are inconsistent. At the same time, the massage frequency of the two acupuncture points is inconsistent and the force acting on Zusanli-right is uneven.
Figure 12.
The training data of Zusanli. (a) Training data of Zusanli-left, (b) Training data of Zusanli-right, (c) Histogram of Zusanli-left, (d) Histogram of Zusanli-right. Note: a presents the sensing unit-a, b presents the sensing unit-b, c presents the sensing unit-c.
The massage data of the two acupoints are selected to analyze the student’s massage technique. The experimental results show that the intensity of the student’s massage techniques is larger, and the pressure applied in the acupoints distributed on both sides of the baby are not uniform, and the direction of massage is not correct also. This situation is very common for medical students because the intensity and direction of the massage are easily mistaken when they first learning the technique of massage. However, the student’s massage technique for Zusanli is better than Tianshu as a whole by comparing the two groups of data, because the force acting on the Zusanli-left is relatively uniform. We can speculate that the students’ massage techniques can be gradually improved with the increase in training time. In summary, all the experimental results indicate that the massage training robot system can be used as a training platform for students.
4.Conclusions and future work
This paper presents a new massage training robot system for the treatment of infant diarrhea. Before the system design, the distribution of acupoints and massage manipulation with infants were analyzed and two kinds of array sensors were selected to detect the massage pressure. Based on the characteristics of the sensor, the hardware system of the massage robot was built, and the AD acquisition program was written. The robot system was mainly composed of a bionic baby, massage technique detection circuit, data acquisition system and GUI. The experimental results show that the system can detect the strength of the massage technique by the value of voltage signal, the order of massage technique can be detected by the generation area of the voltage signal, and the frequency of massage technique can be detected by the duration of the voltage signal.
In future work, the sEMG signal detection device and the wearable inertial sensor will be combined to obtain the information of the doctor’s hand muscle strength, and the doctor’s hand motion information collection system will be constructed. The movement law of the limbs during the massage operation by doctors with rich clinical experience will be studied, and an imaged doctor massage operation navigation system can be constructed through human motion mapping method to guide students to conduct standardized training. The massage data of experts should be collected and the expert database should established. Furthermore, the massage data of students can be collected through training. Finally, the student’s massage technique evaluation model will be established by combining it with the expert database.
Acknowledgments
The authors are thankful for the financial support from the National Natural Science Foundation of China (Nos 61703282 and 61963007), the China Postdoctoral Science Funding (No. 2017M622703), the Science and Technology Foundation of Guangdong (No. 2017A050501004), the Natural Science Foundation of Guangdong Province (No. 2018A030313028), the Technology Research Foundation of Basic Research Project of Shenzhen (Nos JCYJ20170413095245139, JCYJ20170306170851910 and JCYJ2016042 8110354308), the Research Foundation of International Cooperation of Shenzhen Municipality (No. GJHZ20170331105318685), and the Sanming Project of Medicine in Shenzhen (No. SZSM201612049, No. SZSM201512011).
Conflict of interest
None to report.
References
[1] | Xu YH, Feasibility study of TCM massage for infant with food diarrhea. Chinese and Foreign Medical Research. (2017) ; 15: (23): 32-33. doi: 10.14033/j.cnki.cfmr.2017.23.015s. |
[2] | Liu CF, Clinical Effect of TCM Massage in Treating Infantile Dyspepsia Diarrhea. Heilongjiang Journal of Traditional Chinese Medicine. (2017) ; (5): 51-52. |
[3] | Su PY, Reflections on the Teaching Reform of Acupuncture and Tuina in Rehabilitation Technology. Modern Medical Hygiene. (2015) ; 31: (8): 1255-1266. doi: 10.3969/j.issn.1009-5519.2015.08.058. |
[4] | Wang YQ, Constructing a “Life-oriented” TCM Clinical Practice Model. Modern Special Education. (2017) ; (9): 77-79. doi: 10.3969/j.issn.1004-8014.2017.15.028. |
[5] | Zhuo Y, Zhang X, Chen XT, et al, Pediatric Tutor Teaching Design Reflects the Practice and Application of “Student-Centered”. Journal of Changchun University of Traditional Chinese Medicine. (2017) ; 33: (1): 146-148. doi: 10.13463/j.cczyy.2017.01.051. |
[6] | Ying LW, Current Situation and Problems of PBL Teaching in Higher Medical Education in China. Chinese Medical Education Technology. (2018) ; 32: (5): 492-494. doi: 10.13566/j.cnki.cmet.cn61-1317/g4.201805005. |
[7] | Chen F. A systematic review of the effectiveness of flipped classrooms in medical education. Medical Education. (2017) ; 51: (6): 585-597. doi: 10.1111/medu.13272. |
[8] | Zhang GS, Research on the teaching mode of tutorial training. Education Modernization. (2016) ; (46): 136-137. doi: 10.3969/j.issn.1672-2779.2017.07.006. |
[9] | Yang XM, Experience in the teaching of massage and massage in Chinese medicine colleges and universities. Examination Weekly. (2018) ; (A3): 22. |
[10] | Wang JX, Analysis of the problems in tutorial training. Journal of Massage and Rehabilitation Medicine. (2017) ; 8: (22): 86-87. doi: 10.3969/j.issn.1008-1879.2017.22.046. |
[11] | Wang DY, Exploration and Practice of Teaching Characteristics of Tuina Skills. Journal of Hunan University of Traditional Chinese Medicine. (2016) ; 36: (4): 87-88. doi: 10.3969/j.issn.1674-070X.2016.04.023. |
[12] | Safar P, Ventilatory efficacy of mouth-to-mouth artificial respiration, Airway obstruction during manual and mouth-to-mouth artificial respiration. JAMA. (1958) ; 167: : 335-341, doi: 10.1001/jama1958.72990200026008c. |
[13] | Kouwenhoven WB, Jude JR, Knickerbocker GG, Closed-chest cardiacmassage. JAMA. (1960) ; 173: : 1064-1067. doi: 10.1001/jama.1984.03340470059030. |
[14] | Wang CB, Duan LH, Shi Q, Development of a Human-like Motor Nerve Model to Simulate the Diseases Effects on Muscle Tension for Neurologic Examination Training. 2014 IEEE International Conference on Robotics and Biomimetics. (2014) ; 713-718. doi: 10.1109/ROBIO.2014.7090415. |
[15] | Wang CB, Noh Y, Tokumoto M, Development of a Human-like Neurologic Model to Simulate the Influences of Diseases for Neurologic Examination Training. 2013 IEEE International Conference on Robotics and Automation. (2013) ; 4826-4831, doi: 10.1109/ICRA.2013.6631265. |
[16] | Wang CB, Noh Y, Ebihara K. Development of an Arm Robot for Neurologic Examination Training. 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. (2012) : 1090-1095. doi: 10.1109/IROS.2012.6385801. |
[17] | Wang CB, Noh Y, Terunaga C, Development of Optic Nerve and Facial Nerve Models for Cranial Nerve Examination Training. 2012 IEEE/SICE International Symposium on System Integration. (2012) ; 492-497. doi: 10.1109/SII.2012.6427317. |
[18] | Wang CB, Noh Y, Ebihara K. Development of a Novel Flow Sensor to Acquire Quantitative Information on BVM Operation During Airway Management Training. 2011 IEEE International Conference on Robotics and Biomimetics. (2011) : 269-274. doi: 10.1109/ROBIO.2011.6181297. |
[19] | Noh Y, Wang CB, Tokumoto M, Development of the airway management training system WKA-5: mechanical design which considers internal organs and external appearance in human anatomy for airway management. 2012 IEEE International Conference on Robotics and Biomimetics. (2012) : 1224-1229. doi: 10.1109/ROBIO.2012.6491137. |
[20] | Saverio F, Luca A, Marcello B. A versatile ultrasound simulation system for education and training in high-fidelity emergency scenarios. IEEE Journal of Translational Engineering in Health and Medicine. (2017) (5): pp. 1-8. doi: 10.1109/JTEHM.2016.2635635. |
[21] | Ishikawa S, Okamoto S, Isogai K, et al., Assessment of Robotic Patient Simulators for Training in Manual Physical Therapy Examination Techniques. PLoS One. (2015) ; 10: (4): 1-16. doi: 10.1371/journal.pone.0126392. |
[22] | Zhou XW, Development of FZ – I type force analyzer for traditional Chinese massage manipulation and analysis of point – rail variation combined with Gun method. Journal of Applied Biomechanics. (1996) ; 3: (11): 179-183. |
[23] | Gu X, Development of Chinese medical massage teaching instrument. Chinese Manipulation & QI Gong Therapy. (2013) ; 1: (19): 5. doi: 10.3969/j.issn.1008-1879.2003.01.043. |
[24] | Wang T, Bei TX, Li YP, Research and Realization of the Robot Massage Evaluation System Based on Fuzzy Set Theory, Proceedings of the 8th World Congress on Intelligent Control and Automation, (2010) 6498-6501. doi: 10.1109/WCICA2010.5554221. |
[25] | Zheng QX, Research on Glove Massage Information Collection Device and Pneumatic Human Organ Simulation Device, Guangdong University of Technology. (2019) : 10-20. |
[26] | Zhang SF. Chinese Pediatric Tuina, Shanghai College of Traditional Chinese Medicine Press, (1992) : 3-47. |


