
Differential barometric-based positioning technique for indoor elevation measurement in IoT medical applications
Abstract
BACKGROUND:
Medical applications have begun to benefit from Internet of Things (IoT) technology through the introduction of wearable devices. Several medical applications require accurate patient location as various changes affect pressure parameters inside the body.
OBJECTIVE:
This study aims to develop a system to measure indoor altitude for IoT medical applications.
METHODS:
We propose a differential barometric-based positioning system to estimate the altitude between a reference sensor and a localizing sensor connected to the human body. The differential barometric altimetry model is introduced to estimate indoor elevations and eliminate environmental artifacts. In addition, a Gaussian filter processing is adopted to remove noise from the elevation measurements. The proposed system is then investigated through extensive experiments, using various evaluation criteria.
RESULTS:
The results indicate that the proposed system yielded good accuracy with reduced implementation complexity and fewer costs.
CONCLUSIONS:
The proposed system is resilient compared to other indoor localization approaches, even when numerous environmental artifacts in indoor environments are present.
1.Introduction
Emerging IoT technology, such as interconnected medical devices and sensors, has played an important role in next-generation medical technology [1].The wearable medical devices are the typical IoT sensor nodes that are able to continuously monitor, actuate, and record patient bio-signal data, which can be used by medical personnel to diagnose, prevent, and respond to various illnesses [2, 3]. Wireless sensor network (WSN) is a critical part to the actualization of the IoT paradigm. In addition, indoor localization has become increasingly vital to today’s pervasive wireless technology as add-ons [4]. Together, WSNs and indoor localization can be used to achieve a variety of location-based services, such as patient tracking, health care monitoring, and domotic automations. Due to growing demands for indoor location-based applications, high-accuracy indoor localization has a vast market prospect.
Accurate localization can be achieved using Indoor Positioning Systems (IPS). IPSs can measure the positions (x-, y-, and z-coordinates) of object in indoor environments. Several localization approaches can be applied to medical problems [5]. One of the most important tasks in intensive care can monitor vital signs, such as the blood pressure, oxygen saturation, and pulse rate of a patient. Figure 1 shows a measurement setup for invasive arterial blood pressure. Invasive arterial blood monitoring systems are particularly useful clinical tools that provide beat-to-beat blood pressure measurements and visible waveforms, allowing for a more detailed analysis of a patient’s cardiovascular status [6]. The arterial pressure is directly measured by inserting cannula needle into a suitable artery. Intra-arterial monitoring systems include a measuring apparatus, transducer, and monitor. The measuring apparatus, which consists of an arterial cannula connected to tubing containing a continuous column of saline, transmits the blood pressure to the transducer [7]. The transducer then converts the measured pressure into an electrical signal. The monitor amplify the output signal from the transducer, filter noise, and display the arterial waveform in real time on a screen [7].
![Components of an arterial monitoring system [6, 7].](https://content.iospress.com:443/media/thc/2017/25-S1/thc-25-S1-thc1333/thc-25-thc1333-g001.jpg)
Changes in location and orientation can affect pressure parameters inside the body where the body needs to react accordingly. For example, the pressure parameters in the lungs and limbs of a patient sitting upright are different from a patient lying horizontally. A localizing sensor node, called a “tag”, can be fixed to the patient’s body to improve the accuracy of the monitoring system. For our medical applications, tag localization is achieved by updating the elevation estimation when the tag moves to a new elevation.
One method used to perform indoor elevation measurement is barometric altimetry. Barometric altimetry is a traditional method for altitude measurement that is based on the decrease in atmosphere pressure as the altitude increases [8, 9]. Hence, elevation estimation can be performed using measured pressures and a height-pressure model. WSNs enable data transfer among barometric sensors.
This study focuses on the development of an IPS that can precisely measure the z-coordinate of a tag rather than the x- or y-coordinates of the tag. This work consists of the following general features.
(1) A differential barometric altimetry model and a Gaussian filter processing are used to obtain accurate indoor elevation estimates, and eliminate environmental artifacts and noise.
(2) The constant offset of the proposed prototype system based on the average difference in air pressure values is designed to eliminate the inherent difference in atmospheric sensors.
(3) The distribution of the elevation measurement samples is analyzed and an error analysis is conducted using four proposed statistical criteria.
(4) The opinion that the effects of environmental changes do not on the elevation measurements for the proposed system is discussed.
The rest of this paper is organized as follows. In Section 2, previous IPSs research is discussed. In Section 3, our proposed system structure for accurate elevation measurement in medical applications is presented. In Section 4, the differential barometric altimetry model, Gaussian filter, and calibration steps are introduced. In Section 5, a comparative evaluation is performed, and the effects of environmental factors on the elevation measurements are discussed. The conclusions and opportunities for future studies are presented in Section 6.
2.Related work
This study focuses on the indoor altitude estimation of a tag. Several IPSs could be applied to this medical application. Liu et al. [10] provide a survey of the existing IPS and classified them based on the used technology. A comprehensive performance comparisons including accuracy, precision, complexity, scalability, robustness, and cost is given. However, these IPSs systems have not been compared from a medical application perspective.
Systems that integrate additional sensors have been designed for improving altitude estimation precision. Evennou and Marx introduced a system employing inertial sensors for WLAN [11]. Wang et al. developed a system by utilizing additional air pressure sensors [12]. Both of these systems yielded estimation accuracies within one meter. However, these systems are still insufficient for the medical applications discussed herein. Furthermore, measurements obtained from inertial sensors can be easily drifted, which must be corrected.
In [13], pressure sensors were employed for improving the accuracy of altitude estimation in satellite navigation systems. The authors indicated that local interference must be considered when performing altitude estimation. In [14] a method based on barometric sensors was developed for Body Sensor Networks (BSNs). In this method, one barometric sensor acts as a reference object, while the other sensor is attached to the patient’s body. However, the transmission may be not direct, if the nodes are in remote range or via multi-hop. Obviously, there is an air pressure measurement delay. Thus, these systems are not suitable for the real-time requirements of medical applications.
Medical applications have additional hardware requirements. For example, hardware must be small and easy to use. The aging population and nursing staff shortages necessitate the development of advanced systems. However, although many IPSs have been proposed, most have only been evaluated in the non-representative measurement.
In this study, the air atmosphere pressures were collected to calculate altitude, according to the idea of differential measurement. The proposed method is based on the decrease in barometric pressure that occurs with increasing altitude. The effects of local disturbance are prevented with the differential barometric altimetry model and a Gaussian filter.
3.System architecture
The Crossbow
The IEEE 802.15.4 compliant protocol was implemented in order to transmit the barometric pressure measurements. One node, which was fitted on the floor, acted as the reference node and sent the measured pressure measurements to the base station. The other node, which was placed at different altitudes, acted as the localizing tag and sent the measured pressure values to the base station. The difference in altitudes between the reference and the sensors measured the altitude, was calculated by using the differential barometric altimetry formula.
4.Differential barometric altimetry system
In this section, the accurate altitude measurement system for medical applications is presented. The proposed differential barometric-based positioning system implements three strategies to improve the accuracy of elevation estimation:
• A differential barometric altimetry model based on the decrease in barometric pressure with increasing altitude;
• A Gaussian filter processing for noise reduction;
• An error correction based on the differences in pressure between nodes placed at the same location.
4.1Differential barometric altimetry model
According to atmospheric physics [15], the vertical movement of the atmosphere is small and can be estimated in a static equilibrium state. Therefore, force in the horizontal direction cancels the net upward pressure in the vertical direction and reaches equilibrium with its own gravity.
Assume that the air temperature varies linearly with height in a polytrophic atmosphere. For instance, the temperature decreases by approximately 6.5
(1)
where
(2)
Equation (2) is the basic formula used to measure height. According to the international barometric Eq. (2), the elevation calculations can be written as:
(3)
where
Pressure conditions in indoor environment can change as a result of various factors, such as air conditioners and opening doors. These disturbances are large compared to the small changes in barometric pressure with altitude. In order to resolve pressure disturbances, the air pressure sensors were arranged close to one another. As a result, the effects of changes in environmental pressure can be reduced. In addition, noise was effectively reduced by using a Gaussian filter processing.
4.2Gaussian filter
In order to eliminate errors in the experimental results caused by noise, a Gaussian filter processing was used to remove all abnormal measurements produced by outside interference fluctuations. This approach reduced the effects of disturbance values outside of the designated range to improve the accuracy of the proposed system. It is supposed that elevation measurements obey the Gauss distribution
(4)
Only 68.2% of the centralized elevation measurements were accepted, which can ensure the removal of possibly abnormal values. If a larger accepted interval had been used, such as [
4.3Calibration
Generally, a principle of “uncertainty” is reflected in air pressure measurement. During the initial stages of the experiment, the sensors placed near one another yielded different air pressure values at the same altitude. The sensors still yielded different values after being moved the same distance vertically. This indicated that the differences in pressure readings resulted from inaccurate factory calibration coefficients are unique to each sensor. The differences did not change over time. Therefore, a constant offset calibration procedure is significant to enable a reliable and accurate elevation estimation system.
The proposed system was calibrated by obtaining a number of samples at a reference position (elevation h
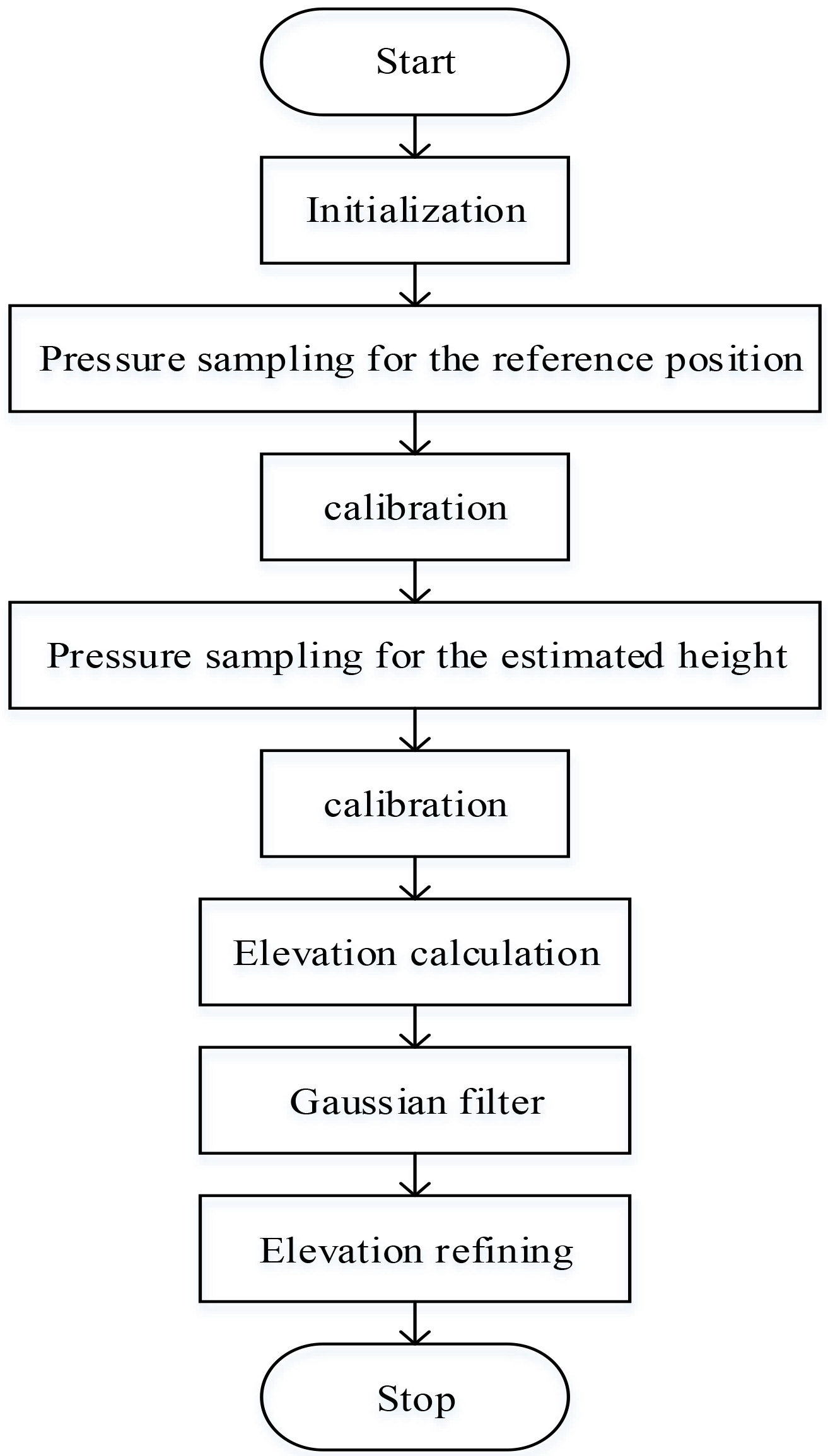
The flow diagram of the proposed system is shown in Fig. 2.
Figure 2.
Flow diagram of the differential barometric altimetry system.
5.Results and discussion
In this section, a comparative experimental evaluation is performed, and the effects of environmental factors on the elevation measurements are discussed.
5.1Results and analysis
First, the system was calibrated by placing the two sensors in the same room at the reference position h
The distribution of the calibrated elevation measurement samples, obtained when the localizing sensor was positioned at elevations of h
Figure 3.
(a) Air pressure measurements obtained at the same reference position. (b) Deviation correction of the measurements.
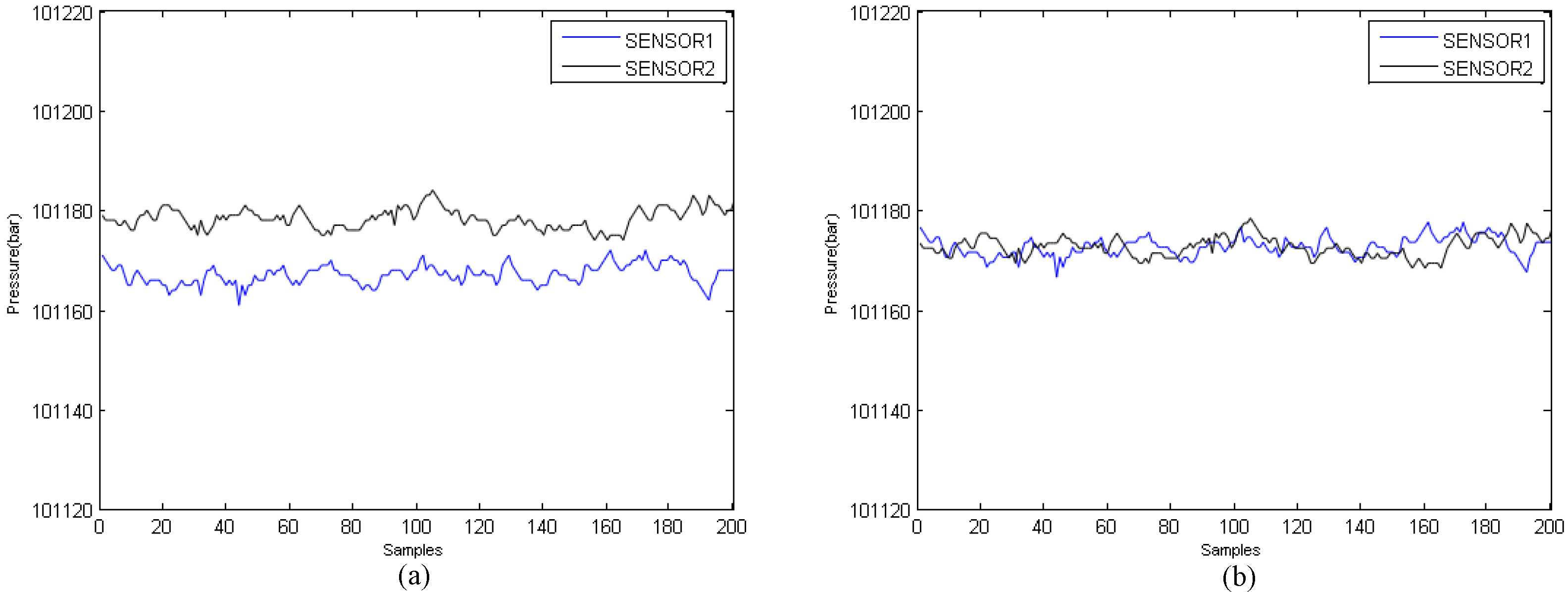
Figure 4.
Normally distributed dataset of the differential altimetry.
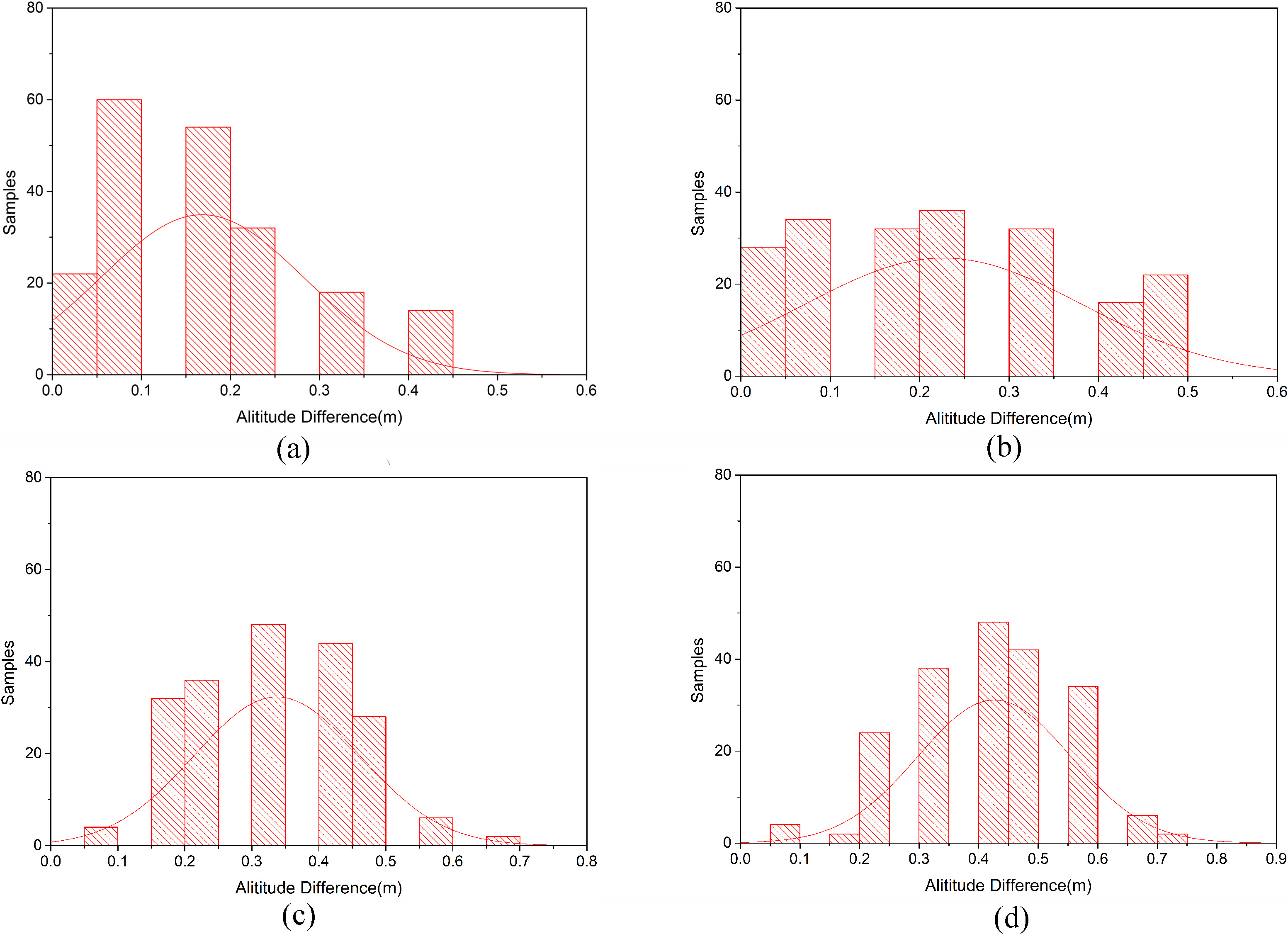
Since the derived elevation is calculated in terms of pressure conversions, the noise in this particular case is normally distributed. Figure 4 depicts the Gaussian distribution of the unfiltered measurements at heights of 10, 20, 30, and 40 cm, respectively. The red bar graphs represent the absolute frequency of the elevation difference values in m with 0.05 m spacing. The red curve denotes the corresponding calculated Gaussian distribution. These graphs illustrate the raw elevation measurements. Consequently, the filtered measurements followed a normal distribution. As shown in this figure, most of the 200 measurements obtained at each height were distinguishable.
Furthermore, the errors introduced into the proposed system were estimated according to the differences between the actual and the calculated elevation. Four statistical criteria were used to determine the stability, accuracy, and precision of the proposed system, including the Mean, Standard Deviation, Average Error (AE), and Root Mean Square Error (RMSE), defined in Eqs (5) and (6):
(5)
(6)
where
Table 1
Error statistics (Unit: m)
| Actual | Unfiltered elevation measurements | Filtered elevation measurements | ||||||
| elevation (m) | Mean (m) | Standard deviation | AE | RMSE | Mean (m) | Standard deviation | AE | RMSE |
| 0.1 | 0.17 | 0.11 | 0.1 | 0.13 | 0.15 | 0.06 | 0.08 | 0.06 |
| 0.2 | 0.23 | 0.16 | 0.13 | 0.16 | 0.21 | 0.09 | 0.09 | 0.08 |
| 0.3 | 0.34 | 0.12 | 0.11 | 0.13 | 0.34 | 0.07 | 0.08 | 0.07 |
| 0.4 | 0.43 | 0.13 | 0.11 | 0.13 | 0.42 | 0.07 | 0.07 | 0.06 |
Table 1 indicates that the filtered measurements yielded lower errors than the unfiltered measurements. Points with large fluctuations were eliminated by the Gaussian filter processing. For example, the standard deviations of the unfiltered and filtered measurements were less than 0.16 m and 0.09 m, respectively. In addition, the AE values of the unfiltered and filtered measurements were 0.1–0.13 m and 0.07–0.09 m, respectively. The RMSE values of the unfiltered and filtered measurements were 0.13–0.16 m and 0.06–0.08 m, respectively. The stability, accuracy, and precision of the filtered elevation measurements were clearly better than the unfiltered measurements. So, the filtered measurements can be used to solve the indoor elevation estimation problem for medical applications.
5.2Discussion
In practice, the air pressure in an indoor environment may change when the ventilation system is turned on or the door is opened. Even though these changes are quite small, they could significantly influence on the elevation measurements. By performing differential barometric altimetry measurement between the reference and the localizing sensor, the effects of these environmental changes on the elevation measurements can be eliminated.
Due to the influence of weather, temperature, and other factors on the atmospheric pressures, elevation calculations can be inaccurate with a wide range of error. However, the proposed differential barometric altimetry model effectively reduced the errors arising from the experimental environment.
Assume that a roof with an altitude of
(7)
(8)
Thus, any indoor sources of error caused by environmental factors, such as air conditioners and doors, were removed, which effectively reduces the effects of environmental pressure changes. To eliminate the remaining errors resulted from noise during the elevation calculations, a Gaussian filter processing was used to further enhance elevation accuracy.
6.Conclusions and future work
Accurate, reliable, real-time indoor positioning and position-based services are needed for medical applications, such as blood pressure monitoring and wireless elevation measurement. In this paper, a differential barometric-based positioning system was proposed for indoor elevation measurement in medical applications. Although environmental changes are very unstable, they could influence on the elevation measurements. The proposed system was resilient to environmental effects that alter air pressures, such as air conditioners and changes in weather. The differential altimetry model demonstrated that the environmental changes did not influence the elevation measurements. Meanwhile, the Gaussian filter processing was used to reduce noise. The stability, accuracy, and precision of the filtered elevation measurements were approximately 40%, 30% and 50% greater than those of the unfiltered measurements, respectively. Thus, the proposed system could be effectively applied to elevation measurement, even when many obstacles are present. Using IEEE802.15.4, the entire prototype system could be easily extended with additional sensors.
In future studies, the long-term stability of the system will be investigated. In addition, use of more than two sensors as the localizing or reference sensor will be discussed. Furthermore, the Standard Deviation, AE, and RMSE values of the elevation measurements should be further reduced.
Conflict of interest
None to report.
Acknowledgments
The work was supported by the Fundamental Research Funds for the Central Universities (Grant No. 150408001) and China Postdoctoral Science Foundation (Grant No. 2016M591448).
References
[1] | Hossain M S, Muhammad G. Cloud-assisted industrial internet of things (iiot) – enabled framework for health monitoring. Computer Networks. (2016) . |
[2] | Khan J Y, Yuce M R. Wireless body area network (WBAN) for medical applications. New Developments in Biomedical Engineering. INTECH. (2010) . |
[3] | Filipe L, Fdez-Riverola F, Costa N, et al. Wireless Body Area Networks for Healthcare Applications: Protocol Stack Review. International Journal of Distributed Sensor Networks. (2015) . |
[4] | Tennina S, Gomes R, Alves M, et al. The dark side of demmon: what is behind the scene in engineering large-scale wireless sensor networks, Proceedings of the 14th ACM international conference on Modeling, analysis and simulation of wireless and mobile systems. ACM, (2011) : 41-50. |
[5] | Pormante L, Rinaldi C, Santic M, et al. Performance analysis of a lightweight RSSI-based localization algorithm for Wireless Sensor Networks, Proceedings of 2013 International Symposium on the Signals, Circuits and Systems (ISSCS), 2013: : 1-4. |
[6] | Jones A, Pratt O. Physical principles of intra-arterial blood pressure measurement. World Anaesth Tutor Week, (2009) , 137: (8). |
[7] | Invasive blood pressure monitoring [Internet] Norway: MEMSCAP; [date unknown] [cited (2016) Oct 25]. Available from: http://wwwmemscap.com. |
[8] | Huo L. Barometric altimeter theoretical basis and mathematical models. J PLA Inst Surv Mapp, (1997) , 2: : 56-60. |
[9] | Huo L. Research of barometric altimeter and the method accuracy. J PLA Inst Surv Mapp, (2002) , 22: (2): 21-25. |
[10] | Liu H, Darabi H, Banerjee P, et al. Survey of wireless indoor positioning techniques and systems [J]. Systems, Man, and Cybernetics, Part C: Applications and Reviews, IEEE Transactions on, (2007) , 37: (6): 1067-1080. |
[11] | Evennou F, Marx F. Advanced integration of WiFi and inertial navigation systems for indoor mobile positioning. Eurasip Journal on Applied Signal Processing, (2006) , 2006: : 164-164. |
[12] | Wang H, Lenz H, Szabo A, et al. Fusion of barometric sensors, wlan signals and building information for 3-d indoor/campus localization. Proceedings of International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI 2006), S. (2006) : 426-432. |
[13] | Parviainen J, Kantola J, Collin J. Differential barometry in personal navigation. Proceedings of the 2008; IEEE/ION Position, Location and Navigation Symposium, IEEE, (2008) : 148-152. |
[14] | Bollmeyer C, Esemann T, Gehring H, et al. Precise indoor altitude estimation based on differential barometric sensing for wireless medical applications. Proceedings of 2013; IEEE International Conference on Body Sensor Networks. IEEE, (2013) : 1-6. |
[15] | Sheng PX, Mao JT, Li JG, et al. Atmospheric physics. Peking University press, (2003) , 1: : 84-99. |
[16] | Ai GX, Sheng PX, Du JL, et al. Barometric altimetry system as virtual constellation applied in CAPS. Science in China Series G: Physics, Mechanics and Astronomy, (2009) , 52: (3): 376-383. |


