
IT2 fuzzy adaptive containment control for fractional-order heterogeneous multi-agent systems with input saturation
Abstract
In this paper, the containment control problem of second-order nonlinear heterogeneous multi-agent system is studied. In order to deal with complex uncertainties such as unknown parts, uncertainties, and input constraints in the system, we designed a distributed fuzzy adaptive controller. The interval type-II (IT2) fuzzy set is adopted to deal with the uncertainty of membership functions. We construct a matrix equality and a matrix inequality to deal with the asymmetric Laplace matrix. The controller designed is simple and the designed controller only uses the information of itself and its neighbors. Therefore, it is very easy to be compensated in practice. Finally, a simulation example is introduced to verify the effectiveness of the proposed methods.
1Introduction
The coordinated control of multi-agent systems is becoming increasingly prevalent in various fields such as life, industry, and aerospace. As a result, many experts and scholars are showing great interest in this area and have been conducting extensive research [1–7]. Containment control, which involves designing control protocols that urge the state or output of followers into the convex hull spanned by those of leaders, is a common problem in multi-agent system coordination control. Although the containment control problem of integer-order multi-agent systems has been widely studied [8–16], many physical systems exhibit fractional-order (non-integer) dynamic behaviors due to their unique materials and characteristics, such as microorganisms in underwater environments and unmanned aerial vehicles operating in complex space environments. Compared with integer-order differential equations [17–19], fractional-order differential equations have non-local and long-memory effects [20, 21], which makes them of great value in studying nonlinear systems, chaotic phenomena, and functional calculus. Therefore, it is important to study the dynamics of multi-agent systems in the sense of fractional-order and to investigate the containment control problem of fractional-order nonlinear systems, which has practical significance [22–26]. Ye et al. [22] have proposed two containment control protocols for networked fractional-order systems with sampled position data. In [23], sufficient conditions for asymptotic stability of a specific case of multi-order fractional system were derived. Moreover, [24] and [25] established necessary and sufficient conditions to ensure the achievement of containment control for fixed topology. Yang et al. [26] have investigated the distributed cooperation control of heterogeneous fractional-order multi-agent systems with time delays and obtained the consensus condition for compounded delayed fractional-order multi-agent systems.
In many real-world scenarios, it can be challenging to obtain an accurate mathematical model due to the inherent complexity of the system. To address this issue, researchers have investigated the control problem of multi-agent systems based on adaptive fuzzy logic systems, as documented in several studies [27–31]. However, these studies have primarily focused on using traditional type-I fuzzy logic systems to study controller problems related to multi-agent systems. Few studies have explored the use of interval type-II (IT2) fuzzy adaptive systems for complex nonlinear fractional-order multi-agent systems [32–35]. For instance, in [32], the authors investigated cooperative control for time-delay multi-agent systems and proposed a new robust adaptive control technique. Zhang et al. [33] presented sufficient criteria for achieving containment control, while [34] discussed a new methodology for building and evolving hierarchical fuzzy systems. Additionally, [35] explored a secure type-II fuzzy ontology-based multi-agent framework. However, despite these efforts, to the best of our knowledge, there is a lack of a systematic study of containment control for complex nonlinear fractional-order multi-agent systems characterized by unknown nonlinear functions and external disturbances. As such, there exists a need for further research to explore the use of IT2 fuzzy adaptive systems and develop effective containment control strategies for these complex systems.
The dynamic behavior of multi-agent systems is typically described using single integrator, double integrator, and general linear systems. Among these, the double integrator system considers both position and velocity information of the agents and has gained widespread use in the field of robot cooperative control [15]. As a result, it is highly favored in this area. For the containment control problem of fractional-order multi-agent systems, reference [24] studied general linear systems, but the multi-agents studied were homogeneous. References [23, 25, 26] studied the dynamic behavior of agents represented by single-integrator systems. The system studied in reference [22] was represented by a double-integrator system, but the double-integrator system studied was relatively simple and did not consider practical situations such as system uncertainty, unknown functions, and controller saturation. Inspired by the above-mentioned arguments, In this paper, we study the design of distributed control protocol for a class of complex fractional-order multi-agent systems with saturated inputs, unknown nonlinear functions, and external disturbances, so that all followers can converge to the polyhedron formed by multiple pilots. the main work and contributions of this article are described as follows.
1) An adaptive IT2 fuzzy containment control method is firstly designed for the nonlinear fractional-order multi-agent systems with unknown nonlinear function, external interference, and input saturation.
2) The containment control problem is solved merely utilizing information of itself and its neighbors under a directed topology.
3) The adaptive controller designed in this paper is completely distributed, that is, each agent only uses the information of itself and its neighbors.
4) The controller designed does not need to know the specific information of the leaders. As long as the states of the leaders are bounded, it can solve the containment control problem.
The remainder of this article is organized as follows. We briefly introduce the nonlinear fractional-order multi-agent systems model and formulate the problem in Section II and III, respectively. In Section IV, both the proposed IT2 fuzzy adaptive method and effectiveness analysis are shown. In Section V, simulation examples are given to prove the effectiveness of this new method. Finally, Section VI presents the conclusion.
1.1Notations
This paper considers a multi-agent systems consisting of M leaders and N followers. Its topology is described by a directed graph
Denote by dist(
2Preliminaries
Let us first review the definition of fractional-order calculus, IT2 fuzzy systems and several useful Lemmas.
2.1Fractional-order calculus
Definition 1 [36, 37]. For an integrable function
Definition 2 [36, 37]. The Caputo derivative of fractional order α of a function f∈
Lemma 1 [20, 38]. If
Lemma 2 [21]. If f (t) is a continuous function, then we have
Lemma 3 [39]. Let
2.2Interval Type-II fuzzy systems
Considering the interval type-II fuzzy logic system, the i1i2 ⋯ inth IF-THEN fuzzy rule can be expressed as:
Ri1i2⋯in : IF x1 is
THEN y is [θi1i2⋯in, ϑi1i2⋯in] ,
where x = [x1, x2, …, xn] T and y are the inputs and outputs of the fuzzy logic system respectively.
In order to obtain the final output of the system, many scholars have devoted themselves to the research of model reduction, such as, in [40–43]. In this paper, the improved Biglarbegian-Melek-Mendel (BMM) direct defuzzification method [49, 50] is adopted, and the final output of the system is:
(1)
Define fuzzy basis function
(2)
Then the fuzzy logic system can be expressed as
(3)
L2 (x) , …, Li1i2⋯in (x)] T, ϑ = (1 - η) [ϑ1, ϑ2, …, ϑi1i2⋯in] T, R (x) = [R1 (x) , R2 (x) , …, Ri1i2⋯in (x)] T.
Remark 1. When applying the theory of IT2 fuzzy systems to solve practical problems, an important step is model reduction and defuzzification. The classic algorithm used for this task is the Karnik-Mendel (KM) algorithm [45]. However, in practical applications, the KM algorithm has several limitations, such as requiring iteration and not being convenient for stability analysis of controllers. Biglarbegian et al. [49, 50] proposed the BMM direct defuzzification method, which is more suitable for controller design and stability analysis. In this paper, the tuning factor is included with the unknown parameters, eliminating the special restrictions on the tuning factor.
Remark 2. Many research results show that fuzzy systems are universal approximators [44, 45].
2.3Other Lemmas
Lemma 4 [46]. For any ν > 0 and any ω, the following inequality holds
Lemma 5 [47]. (Barbalat)
3Problem description
Consider the second-order uncertain fractional-order nonlinear multi-agent systems composed of N followers and M leaders. The system model of follower
(4)
(5)
The system model of leader
(6)
Assumption 1. For each follower, there exists at least one directed path from the leader to the follower. For each leader, there is no directed path to the leader from any other agent.
Lemma 6. Under Assumption 1, the Laplace matrix
(7)
Remark 3. Define
(8)
(9)
Assumption 2. There is a closed convex set
The objective of this paper is to design controllers for the follower agents to achieve containment control subject to input constraints: For
1. xi (t) converges to the convex hull formed by the leaders, that is,
(10)
2. ui (t) stays within the desired range
4Main results
The communication between agents in multi-agent systems is local, so only the error between neighboring agents can be used to design the distributed controller
(11)
Then the vector form of consensus tracking error:
(12)
By taking the derivative of both sides of equation (12), we can get:
(13)
Approximation of unknown smooth function fi (xi) (i = 1, 2, …, N) with fuzzy logic system of type-II (1)-(3)
(14)
(15)
(16)
To deal with the saturation function, we make the following assumption [48].
(17)
Theorem 1. For fractional-order multi-agent system (4)-(6), if there are positive numbers k, λ, τ, positive definite symmetric matrix P, the following conditions are satisfied:
(18)
(19)
(20)
(21)
(22)
(23)
Proof. Let δ = ke1 + e2, based on the definition of Δ (ui) in (17), we have
(24)
For system (24), construct the following Lyapunov candidate function
(25)
First, for V1, derivation on both sides, according to Lemma 3 and condition (18), we can get
(26)
(27)
Substitute controller (20) into (26) and consider inequality (27), we can get
(28)
For V2, taking its fractional-order differential, we can get
(29)
Combine (29) (30) and consider the adaptive rate (21), we have
(30)
(31)
Based on Lemma1, integrating on both sides of equation (31), we can get
(32)
According to Definition 1, the following inequality holds
(33)
Thus
(34)
Moreover
(35)
Therefore,
(36)
According to Lemma 5, there
(37)
so
(38)
Based on the definition of δi, there are
(39)
i.e.,
(40)
According to (12), it is known that all the followers of the system converge to the inside of the polyhedron formed by the leaders.
5Simulation
This section gives five followers and two leaders to verify the effectiveness of the containment control algorithm designed in this paper. The network topology diagram is shown in the Fig. 1. Among them, indexes 1,2,3,4,5 refer to followers, and indexes 6,7 refer to leaders.
Fig. 1
Network communication topology diagram.
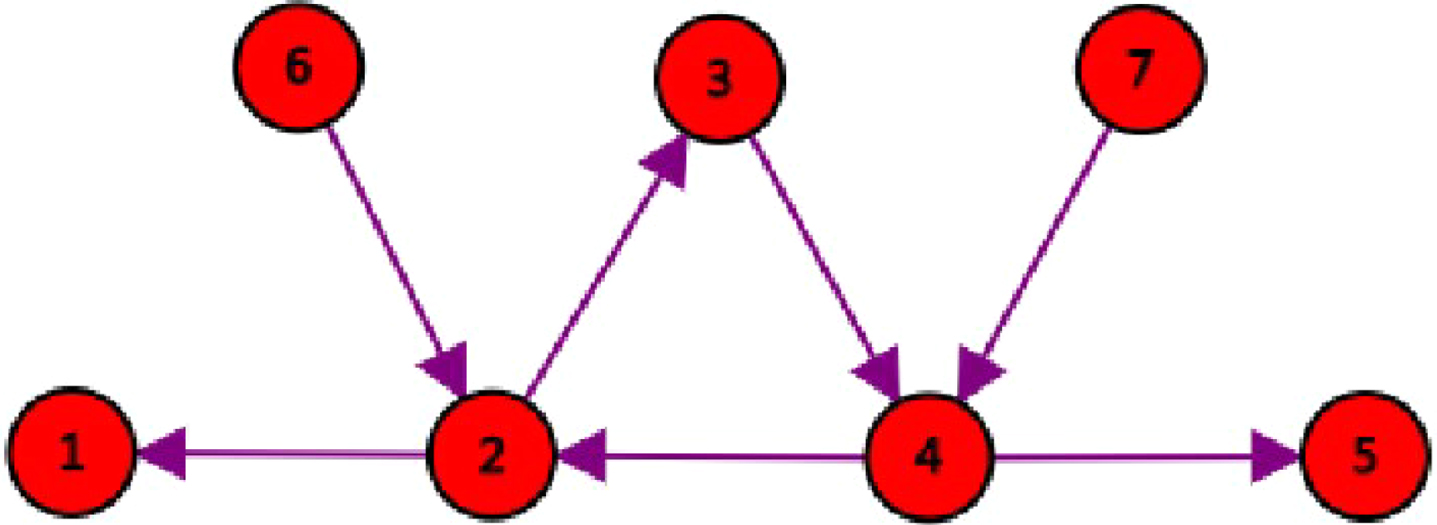
According to Fig. 1, we can get the Laplace matrix (7), where
(41)
The dynamic systems of five followers and two leaders are described as follow
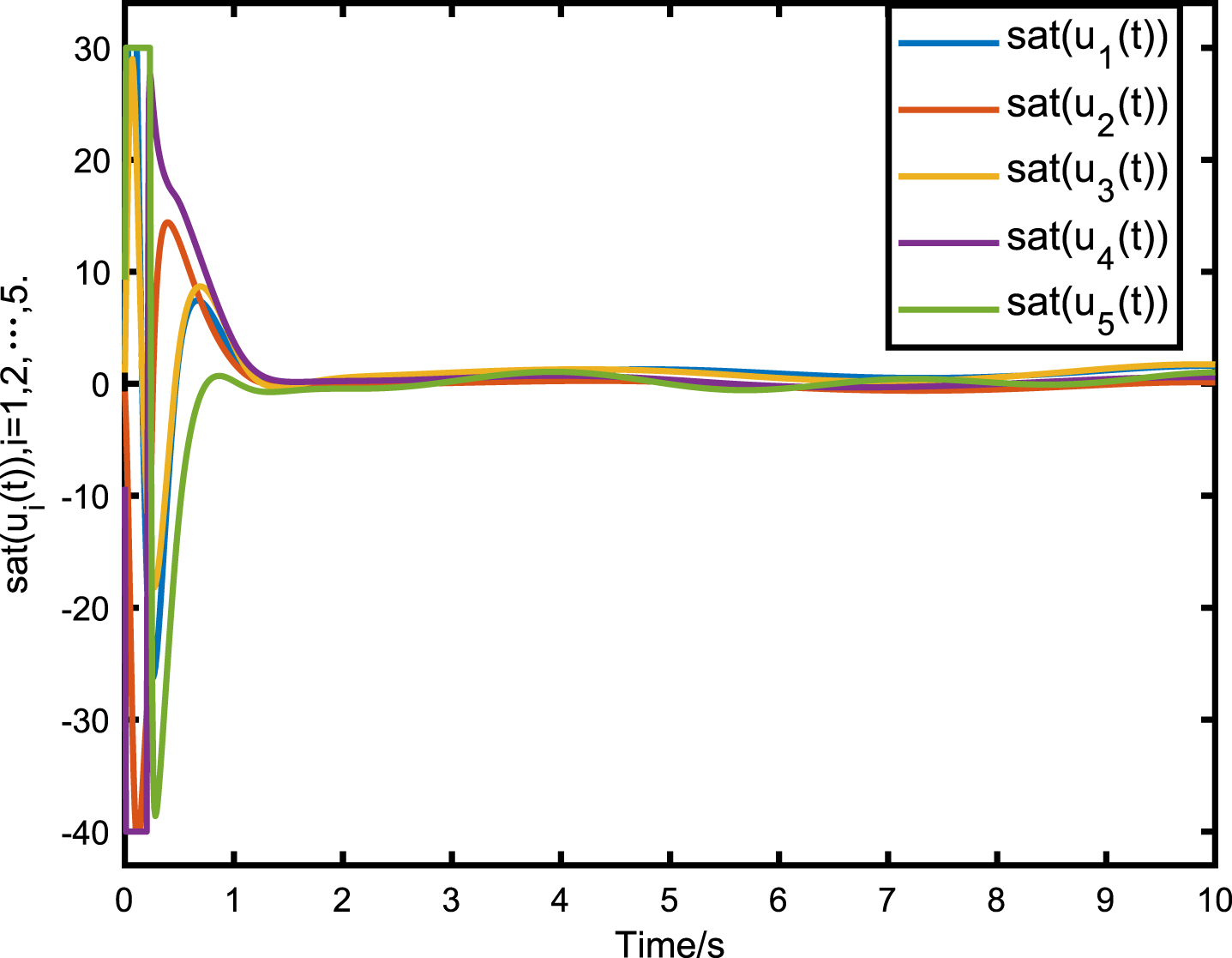
Due to the unknown dynamics of the navigator and the presence of uncertainties and input saturation phenomena in the considered system, the methods proposed in literature [22–26] are not applicable. However, by using the method proposed in this article, we were able to achieve containment control. Design controller (20)-(23), where parameter boundary ZM = 10, ɛz = 1.1, and control constraint -40 ≤ ui (t) ≤30 (i = 1, 2, …, 5) . The fuzzy membership function is taken as the following form
There are constants k = 1, λ = 1, τ = 4 and matrix
The simulation results are shown in Figs. 2–4. As shown in Fig. 2, it can be seen that the position tracking error of the follower converges to zero, indicating that the position of the follower will eventually converge to the polyhedron formed by the position of leaders. As shown in Fig. 3, it can be seen that the velocity tracking error of the follower converges to zero, indicating that the velocity of the follower will eventually converge to the polyhedron formed by the velocity of the leader. Figure 4 shows the condition where the input of the system satisfies bounded constraints.
Fig. 2
Consensus tracking error e1.
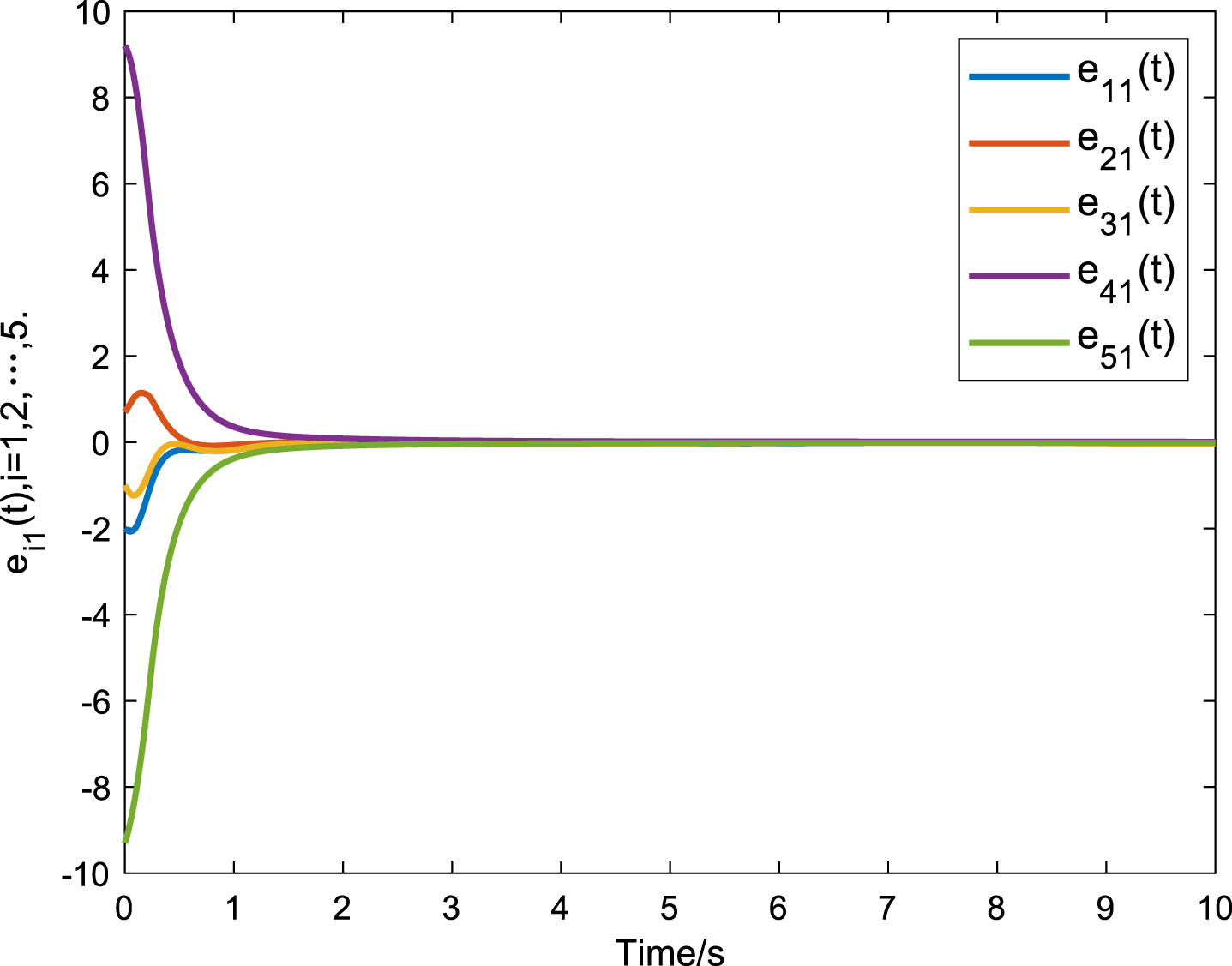
Fig. 3
Consensus tracking error e2.
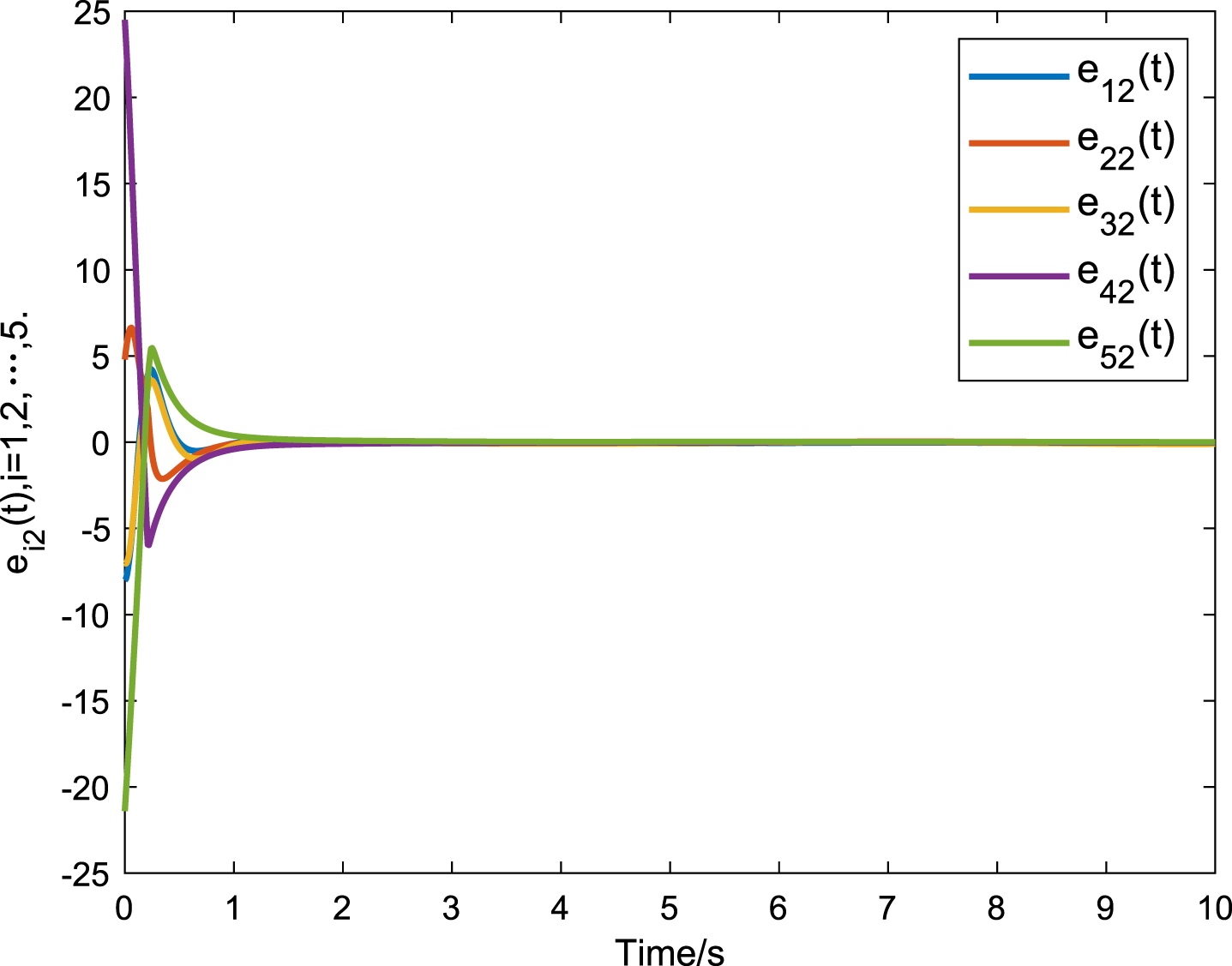
Fig. 4
Saturation control input sat(u).
6Conclusion
In this paper, a distributed IT2 adaptive fuzzy controller is designed to solve the containment control problem of nonlinear fractional-order multi-agent systems. The problems studied take into account unknown functions, uncertainties and input constraint. The results obtained have a wider range of applications. The simulation results also show that the proposed methods are effective. The next step will consider the situation that the communication topology is time-varying.
References
[1] | Chen F. and Ren W. , On the control of multi-agent systems: A survey, Foundations and Trends in Systems and Control 6: (4) ((2019) ), 339–499. |
[2] | Ge X.H. , Han Q.L. , Ding D.R. , Zhang X.M. and Ning B.D. , A survey onrecent advances in distributed sampled-data cooperative control ofmulti-agent systems, Neurocomputing 275: (31) ((2018) ), 1684–1701. |
[3] | Qin J.H. , Ma Q.C. , Shi Y. and Wang L. , Recent advances in consensusof multi-agent systems: A brief survey, IEEE Transactions onIndustrial Electronics 64: (6) ((2017) ), 4972–4983. |
[4] | Zhou L.Q. , Zheng Y.S. , Zhao Q. , Xiao F. and Zhang Y.L. , Game-based coordination control of multi-agent systems, Systems & Control Letters 169: ((2022) ), 105376. |
[5] | Zhao H.B. , Meng X.Y. and Wu S.T. , Distributed edge-basedevent-triggered coordination control for multi-agent systems, Automatica 132: ((2021) ), 109797. |
[6] | Ren R. and Cao Y.C. , Distributed coordination of multiagent networks: Emergent problems, models, and issues, Springer, 2011. |
[7] | Lewis F.L. , Zhang H.W. , Movric K.H. and Das A. , Cooperative control of multi-agent systems: Optimal and adaptive design approaches, Springer, 2014. |
[8] | Zhang Y.H. , Sun J. , Li H.Y. and He W. , Event-triggered adaptive bipartite containment control for stochastic multiagent systems, IEEE Transactions on Systems, Man, and Cybernetics: Systems 52: (9) ((2022) ), 5843–5852. |
[9] | Tauchnitz S. , Yuan C.Z. and Stegagno P. , Application of distributed linear multi-agent containment control to robotic systems, IFAC-PapersOnLine 55: (37) ((2022) ), 548–553. |
[10] | Ren J.H. and Zong X.F. , Containment control of multi-agent systems with stochastic multiplicative noises, Journal of Systems Science and Complexity 35: (3) ((2022) ), 909–930. |
[11] | Xiao W.B. , Zhou Q. , Liu Y. , Li H.Y. and Lu R.Q. , Distributed reinforcement learning containment control for multiple nonholonomic mobile robots, IEEE Transactions on Circuits & Systems. PartI: Regular Papers 69: (2) ((2022) ), 896–907. |
[12] | Wang Y.L. , Chen J. and Hou H.L. , Containment control with delays,velocity constraints and position constraints in directed changing networks, ISA Transactions 129: ((2022) ), 163–170. |
[13] | Lin Q. , Zhou Y.J. , Jiang G.P. , Ge S.Y. and Ye S. , Prescribed-time containment control based on distributed observer for multi-agent systems, Neurocomputing 431: ((2021) ), 69–77. |
[14] | Jiang S.M. , Wang S.M. , Zhan Z. , Wu Y.Q. , Lam W. and Ren R.X. , Containment control of discrete-time multi-agent systems with application to escort control of multiple vehicles, International Journal of Robust & Nonlinear Control 32: (12) ((2022) ), 6913–6938. |
[15] | Zhang F.X. , Chen Y.Y. and Zhang Y. , Finite-time event-triggered containment control of multiple Euler-Lagrange systems with unknown control coefficients, Journal of the Franklin Institute 360: ((2023) ), 777–791. |
[16] | Li P.Y. , Faryar J. and Sun M.X. , Containment control of multi-agentsystems with input saturation and unknown leader inputs, Automatica 130: ((2021) ), 109677. |
[17] | Dhage B. and Dhage J. , Approximating positive solutions of nonlinearBVPs of ordinary second order hybrid differential equations, Malaya Journal of Matematik 10: (02) ((2022) ), 110–118. |
[18] | Dhage B. and Dhage J. , Approximating positive solutions of nonlinear IVPs of ordinary second order hybrid differential equations, Malaya Journal of Matematik 9: (02) ((2021) ), 12–19. |
[19] | Cabada A. and Khaldi R. , Existence of solutions of a second order equation defined on unbounded intervals with integral conditions on the boundary, Malaya Journal of Matematik 9: (03) ((2021) ), 117–128. |
[20] | Li C. and Deng W. , Remarks on fractional derivatives, Applied Mathematics and Computation 187: (2) ((2007) ), 777–784. |
[21] | Kilbas A. , Srivastava H. and Trujillo J. , Theory and application of fractional differential equations, Elsevier, NewYork, 2006. |
[22] | Ye Y.Y. , Wei H.Y. , Lu R.Q. , Su H.S. and Wu Y.Q. , Containment controlfor networked fractional-order systems with sampled position data, IEEE Transactions on Circuits & Systems. Part I: Regular Papers 68: (9) ((2021) ), 3881–3889. |
[23] | Yahyapoor M. and Tabatabaei M. , Containment control of fractional-order multi-agent systems with different fractional-orders, Iranian Journal of Science and Technology, Transactions of Electrical Engineering 46: (4) ((2022) ), 1089–1098. |
[24] | Liu H.Y. , Xie G.M. and Yu M. , Necessary and sufficient conditions for containment control of fractional-order multi-agent systems, Neurocomputing 323: ((2019) ), 86–95. |
[25] | Liu H.Y. , Xie G.G. and Gao Y.P. , Containment control of fractional-order multi-agent systems with time-varying delays, Journal of the Franklin Institute 356: (16) ((2019) ), 9992–10014. |
[26] | Yang H.Y. , Yang Y.Z. , Han F.J. , Zhao M. and Guo L. , Containment control of heterogeneous fractional-order multi-agent systems, Joural of the Franklin Institute 356: (2) ((2019) ), 752–765. |
[27] | Zhao L. , Zhao F.Y. and Che W.W. , Distributed adaptive fuzzyfault-tolerant control for multi-agent systems with node faults and denial-of-service attacks, Information Sciences 631: (2023), 385–389. |
[28] | Deng X. and Cui Y. , Adaptive fuzzy containment control for nonlinear multi-agent systems with input delay, International Journal of Systems Science 52: (8) ((2021) ), 1633–1645. |
[29] | Cheng W.D. , Xue H. , Liang H.J. and Wang W. , Prescribed performance adaptive fuzzy control of stochastic nonlinear multi-agent systems with input hysteresis and saturation, International Journal of Fuzzy Systems 24: (1) ((2022) ), 91–104. |
[30] | Wang N. , Ying W. , Wen G.G. , Lv M.L. and Fan Z. , Fuzzy adaptive constrained consensus tracking of high-order multi-agent networks: Anew event-triggered mechanism, IEEE Transactions on Systems,Man, and Cybernetics: Systems 52: (9) ((2021) ), 5468–5480. |
[31] | Zhao L. and Yang G.H. , Fuzzy adaptive fault-tolerant control ofmulti-agent systems with interactions between physical coupling graph and communication graph, Fuzzy Sets & Systems 385: ((2020) ), 20–38. |
[32] | Afaghi A. , Ghaemi S. , Ghiasi A.R. and Badamchizadeh M.A. , Type-2 fuzzy consensus control of nonlinear multi-agent systems: An LMI approach, Journal of the Franklin Institute 358: (8) ((2021) ), 4326–4347. |
[33] | Zhang Z. and Dong J. , Containment control of interval type-2 fuzzy multi-agent systems with multiple intermittent packet dropouts and actuator failure, Journal of the Franklin Institute 357: (10) ((2020) ), 6096–6120. |
[34] | Jarraya Y. , Bouaziz S. , Hagras H. and Alimi A.M. , A multi-agent architecture for the design of hierarchical interval type-2 beta fuzzy system, IEEE Transactions on Fuzzy Systems 27: (6) ((2019) ), 1174–1188. |
[35] | Ahmad B. and Kim Y.G. , Integration of a secure type-2 fuzzy ontology with a multi-agent platform: A proposal to automate the personalized flight ticket booking domain, Information Sciences 198: (2012), 24–47. |
[36] | Butzer P. and Westphal U. , An introduction to fractional calculus, World Scientific, Singapore, 2000. |
[37] | Peng X. and Wu H. , Non-fragile robust finite-time stabilization andH∞4 performance analysis for fractional-order delayedneural networks with discontinuous activations under theasynchronous switching, Neural Computing and Applications 32: ((2020) ), 4045–4071. |
[38] | Huong D.C. and Thuan M.V. , Mixed H ∞ and passive controlfor fractional-order nonlinear systems via LMI approach, Acta Applied Mathematics 170: ((2020) ), 37–52. |
[39] | Liang S. , Wu R. and Chen L. , Adaptive pinning synchronization infractional-order uncertain complex dynamical networks with delay, Physical A-Statistical Mechanics and Its Applications 444: ((2016) ), 49–62. |
[40] | Juang C.F. and Hsu C.H. , Reinforcement ant optimized fuzzy controller for mobile-robot wall-following control, IEEE Transactions on Industrial Electronics 56: (10) ((2009) ), 3931–3940. |
[41] | Chang Y.H. and Chan W.S. , Adaptive dynamic surface control for uncertain nonlinear systems with interval type-2 fuzzy neural networks, IEEE Transactions on Cybernetics 44: (2) ((2014) ), 293–304. |
[42] | Zou X.G. , Zhao T. and Dian S.Y. , Finite-time adaptive interval type-2 fuzzy tracking control for Mecanum-Wheel Mobile Robots, International Journal of Fuzzy Systems 24: (3) ((2022) ), 1570–1585. |
[43] | Hou S.X. , Chu Y.D. and Fei J.T. , Adaptive type-2 fuzzy neural network inherited terminal sliding mode control for power quality improvement, IEEE Transactions on Industrial Informatics 17: (11) ((2021) ), 7564–7574. |
[44] | Wang L.X. and Mendel J.M. , Fuzzy basis functions, universal approximation, and orthogonal least squares learning, IEEE Transactions on Neural Networks 3: (5) ((1992) ), 807–814. |
[45] | Mendel J.M. , Uncertain rule-based fuzzy systems: Introduction and new directions, USA, Pearson Education, Inc. Springer, 2019. |
[46] | Pplycarpou M.M. and Ilannaou P.A , A robust adaptive non-linear control design, Automatica 32: (3) ((1996) ), 423–427. |
[47] | Khalil H.K. and Grizzle J.W. , Nonlinear systems, Upper Saddle River, NJ: Prentice Hall, 2002. |
[48] | Mirzajani S. , Aghababa M.P. and Heydari A. , Adaptive T-S fuzzycontrol design for fractional-order systems with parametricuncertainty and input constraint, Fuzzy Sets and Systems 365: ((2019) ), 22–39. |
[49] | Biglarbegian M. , Melec W.W. and Mendel J.M. , On the stability ofinterval type-2 TSK fuzzy logic control systems, IEEE Transactions on Systems, Man, and Cybernetics-Part B: Cybernetics 40: ((2010) ), 798–818. |
[50] | Biglarbegian M. , Melec W.W. and Mendel J.M. , On the robustness of type-1 and interval type-2 fuzzy logic systems in modeling, Information Sciences 181: ((2011) ), 1325–1347. |


