
Decentralized navigation model for multiagent cooperative robotic systems
Abstract
On November 20, 2018 at 11 am, Andrés Camilo Jiménez Alvarez defended his Ph.D. thesis entitled Decentralized navigation model for multiagent cooperative robotic systems at the Distrital University Francisco José de Caldas. Andrés Camilo Jiménez Alvarez presented his dissertation in a public open event held in the “Wise Caldas Auditory”, and was able to expose and defend all his research, it was approved by the committee. The thesis was supervised by his advisors, Vicente García-Díaz and Sandro Javier Bolaños, together with the thesis committee, Rubén Gonzáles Crespo, Oscar Fernando Avilés and Roberto Ferro Escobar. All the cited people were present at the event.
1.Thesis summary
The autonomous Multi-Agent Robotic Systems (MARS) are modeled and developed to work in processes dedicated to navigation in stochastic environments, especially in localization, planning, and mapping. These processes make use of design models in centralized systems that generate dependence of a central unit, being this a constraint for the autonomy of the robotic agents.
This is why the decentralization of a robotic multi-agent system has been an area of research in recent years since it allows the control and allocation of distributed tasks in an asynchronous and robust manner since it does not have the dependence on a central unit. However, there are areas in which the communication process in the network generated by the robotic agents is not contemplated, creating dependency on a permanent connection to the neighboring units to realize the proposed objectives [3].
In this Ph.D. thesis, a decentralized model is described, which allows interaction not only between the robotic agents that make up the system, but also, with external agents such as monitoring units or sensors, in a decentralized manner, basing its operating architecture on the emerging technology of Wireless Sensor Networks (WSN).
The implementation of the proposed decentralized model makes use of a communication framework, where each agent in the system could leave the network or accept new connections from external nodes, sending the necessary information based on the transfer history between all the nodes that make up the network. To accomplish this, each agent must comply with four processes to be able to belong to the system, and a fifth process for sending information to the closest nodes based on the Received Signal Strength Indicator (RSSI) and the data history [4].
Fig. 1.
Five modular processes of the framework.
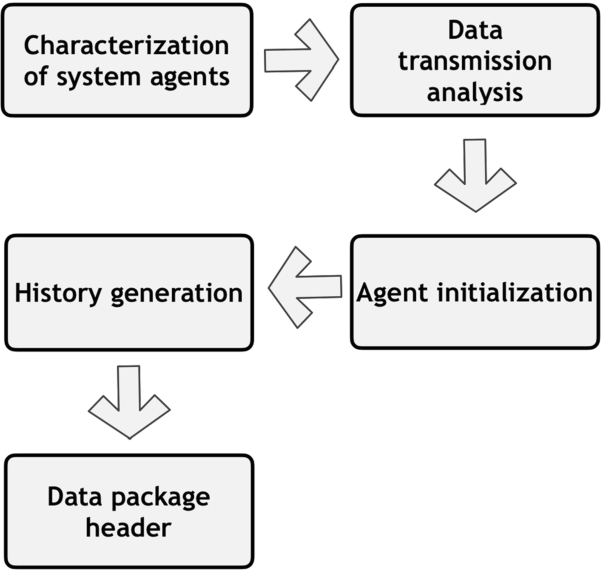
The Framework consists of five modular processes (Fig. 1) that can be modified at any time either at the system level or at the agent level. However, they must be executed sequentially when starting the system for the first time. The first process is the characterization of the components of the agents in the system and their relationship with the environment. The second process is the analysis of communication between the agents. The third process initializes the agents for signing into the ad-hoc network. The fourth process generates the activity history for each of the agents in the system. Finally, the fifth process describes the transmission of information with a header for the information packets. These five processes are explained in detail in [1].
The agents in the system can be heterogeneous, meaning that they can be robotic or static. However, in order for them to use the framework, they need to meet the basic requirements of a WSN node. With this, we can begin the first framework process: agent characterization. Each agent, as an element in the system, must know the area or dimensions of the environment where it will be deployed.
The data transmission analysis process serves to characterize the wireless modules of the agents in the system. For this process, it is necessary for modules to create or join an ad-hoc network. This process must be carried out in an open or closed environment, depending on the conditions of the final development environment.
From the information obtained, you can determine the maximum transmission margin before packet loss and see if the module meets the necessary conditions to address the problem.
The third process initializes the agents at the network level. Each agent that at time
In the fourth process, a dynamic array of four positions is initialized in the processing unit of the robotic agent to store its history, recording information transfers from the agent to the system.
Finally, the fifth process defines the packet header, which consists of three stages. The first stage is the code, the second is the value requested by the code (optional), and the third stage is the information requested by the agent. Below is the definition of each of the codes defined in the framework.
The proposed model demonstrated its ability to perform decentralized navigation tasks, increasing the autonomy of the system. This work also showed the flexibility of this model when implemented in a framework, which allows the design of MARS systems that allow integration with agents that were not present during system initialization such as wireless agents, monitoring agents, or other robotic agents [2].
The flexibility of integrating external agents to MARS allows for new research, given the possibility of applying the framework to evaluate its functionality in MARS for emergency response, specifically in search and rescue tasks for people in difficult access environments. On the other hand, as this is a modular framework, it could be implemented in a sensor network to extend the types of agents capable of participating in the system to perform data analysis.
References
[1] | A. Jiménez, V. García-Díaz and S. Bolaños, A decentralized framework for multi-agent robotic systems, Sensors (Switzerland) 18: (2) ((2018) ), 1–20. doi:10.3390/s18020417. |
[2] | A. Jiménez, V. García-Díaz, R. González-Crespo and S. Bolaños, Decentralized online simultaneous localization and mapping for multi-agent systems, Sensors 18: (8) ((2018) ), 2612. doi:10.3390/s18082612. |
[3] | A.C. Jimenéz, J.P. Anzola and S. Bolaños, Decentralized model for autonomous robotic systems based on wireless sensor networks, ARPN Journal of Engineering and Applied Sciences 11: (19) ((2016) ), 11378–11382. |
[4] | A.C. Jimenéz, S.J. Bolaños and J.P. Anzola, Autonomous multi-agent system for on-line topological mapping and location using wireless sensor network, in: 2017 IEEE International Conference on Power, Control, Signals and Instrumentation Engineering (ICPCSI), (2017) , pp. 216–221. doi:10.1109/ICPCSI.2017.8392125. |


