
Yes, no, maybe, I don’t know: Complexity and application of abstract argumentation with incomplete knowledge
Abstract
Abstract argumentation, as originally defined by Dung, is a model that allows the description of certain information about arguments and relationships between them: in an abstract argumentation framework (AF), the agent knows for sure whether a given argument or attack exists. It means that the absence of an attack between two arguments can be interpreted as “we know that the first argument does not attack the second one”. But the question of uncertainty in abstract argumentation has received much attention in the last years. In this paper, we survey approaches that allow to express information like “There may (or may not) be an attack between these arguments”. We describe the main models that incorporate qualitative uncertainty (or ignorance) in abstract argumentation, as well as some applications of these models. We also highlight some open questions that deserve some attention in the future.
1.Introduction
Abstract argumentation [44] has become a prominent subfield of non-monotonic reasoning. The classical model consists of a directed graph where the nodes are pieces of information called arguments, and the edges represent the conflicts between arguments, called attacks. It can be applied to different domains, especially in multi-agent systems where argument-based dialogues can be used for deliberation [6], negotiation [4] or persuasion [27]. However, this model does not allow to express uncertain information, like “this argument may exist (or not)” or “there may be an attack from this argument to this one”. The increase of expressivity of the model (regarding uncertainty) has been motivated, first, by the issue of merging several argumentation frameworks (corresponding to the knowledge of different agents) into a global view of the group’s knowledge [33]. In this context, Partial Argumentation Frameworks are defined as complete directed graphs with three different kinds of edges, that represent the certain existence of attacks, the certain non-existence of attacks, and the ignorance about the existence of attacks. The model expressivity has been further increased with the definition of Incomplete Argumentation Frameworks (IAFs) that allow to express uncertainty about the existence of arguments (with two different kinds of nodes in the graph). Finally, a new kind of uncertainty has been proposed in [39]: the ignorance about the direction of attacks. It has been defined in the context of Control Argumentation Frameworks, that allow to model uncertainty in dynamic and strategic scenarios, like automated negotiation [40, 41].
The three kinds of uncertainty that have been considered in the literature can all be motivated by concrete situations. First, the uncertainty about the existence of an attack can be naturally identified with uncertainty about the preferences between arguments. Indeed, in Preference-based Argumentation Frameworks [2], the attack relation is combined with preferences over the set of arguments to build a new relation, generally called defeat. An argument a defeats an argument b if a attacks b and b is not preferred to a. Thus, if an agent is not sure whether b is preferred to a, she does not know whether a defeats b or not. An IAF can be used to abstract away from the Preference-based AF: pairs of arguments
This paper describes the main works in this line of research. After a brief description of background notions of propositional logic, computational complexity and abstract argumentation in Section 2, we describe Incomplete Argumentation Frameworks (IAFs, Section 3): the general model as well as subclasses and the complexity of reasoning for two kinds of approaches (based either on completions of the IAF, or on a re-definition of basic concepts like conflict-freeness or defense). Then, in Section 4, we present Control Argumentation Frameworks (CAFs), that allow the modeling of uncertainty in dynamic and strategic contexts. We discuss several applications of IAFs and CAFs in Section 5, and several related notions in Section 6. Finally, Section 7 concludes the paper and highlights some open questions.
2.Background
2.1.Propositional logic
We consider a set V of Boolean variables, i.e. variables that can be assigned a value in
An interpretation is then a mapping
the implication
the equivalence
2.2.Computational complexity
In this part, we briefly describe some background notions on computational complexity, that are important for understanding the relative hardness of the computational problems that will be presented. First, let us mention that we focus on decision problems, that are computational problems that must be answered by a binary answer “YES” or “NO”. We will describe complexity classes, that are simply sets of decision problems that share some properties regarding the time (or space) necessary for solving them. The first one is made of problems that are considered to be tractable: P is the set of decision problems that can be solved in polynomial time. More formally, for any
While all these problems are considered as “easy” ones, we also define classes characterized by non-deterministic algorithms that are considered as computationally hard. Let us first introduce NP, the set of decision problems that can be solved in polynomial time by a non-deterministic algorithm. Another way to characterize NP is to use the notion of witness. Given an instance i of a problem
for any
if i is actually a “YES” instance, then there is at least one
The complementary of a complexity class
The classes P, NP and coNP form the first levels of the polynomial hierarchy [79]. To define higher levels, we need to introduce the concept of oracle. An oracle for a class
Fig. 1.
The polynomial hierarchy.

We present a last complexity class, namely DP, which stands for Differential Polynomial Time. It was first introduced by [75], as the set of decision problems
Let us conclude this part on computational complexity with the notion of hardness. Intuitively, a problem
We refer the interested reader to [7] for more details on the theory of computational complexity.
2.3.Abstract argumentation
Abstract argumentation has been introduced by Dung [44] as the study of arguments acceptability based only on their relationship. It means that arguments are considered as atomic pieces of information: their internal structure and their origin are ignored in the reasoning process. Only the attacks between them matter for determining which arguments can be accepted. Formally:
Definition 1
Definition 1(Argumentation Framework [44]).
An abstract Argumentation Framework (AF) is a directed graph
In this paper, we consider only finite AFs, i.e. A is a finite set of arguments. For
Fig. 2.
An example of argumentation framework.
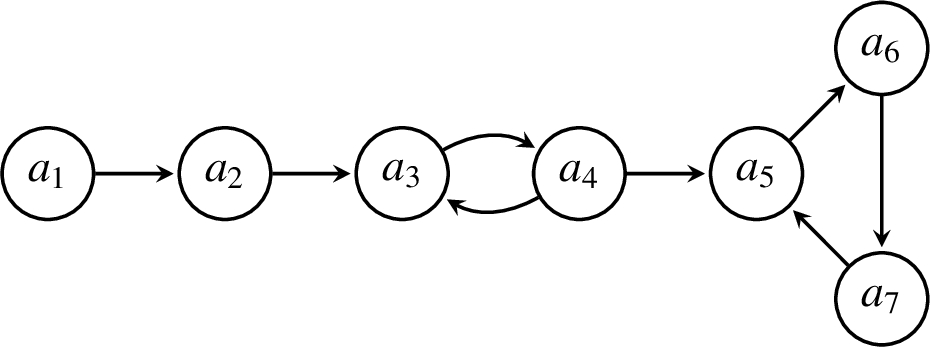
Example 1.
Figure 2 depicts an AF
The acceptability of arguments is classically evaluated through the notion of extensions, i.e. sets of collectively acceptable arguments. A set of arguments has to satisfy some properties to be an extension. The basic principles that underly most extension-based semantics are conflict-freeness and admissibility:
Definition 2
Definition 2(Conflict-freeness and Admissibility).
Given
Conflict-free and admissible sets of an AF
Example 2.
Continuing the previous example, observe that the set of arguments
From these basic requirements, extensions are defined following four semantics, proposed in [44]. Formally, an extension-based semantics is a mapping from an AF
Definition 3
Definition 3(Extension-based Semantics).
Given
a complete extension (
a preferred extension (
a grounded extension (
a stable extension (
Other semantics have been defined since then; see [9] for an overview. It is well-known since Dung’s seminal paper [44] that, for any AF
From a set of extensions
Definition 4
Definition 4(Argument Acceptability).
Given
credulously acceptable with respect to σ if it belongs to some σ-extension of
skeptically acceptable with respect to σ if it belongs to each σ-extension of
rejected otherwise.
We use
Example 3.
We continue the previous example again. Considering
Table 1
Extensions of
| Semantics σ | |||
The complexity of various reasoning problems has been studied in the past. A recent overview is provided by [48]. Let us formally define some of these problems, namely Verification (Ver), Credulous Acceptability (CA), Skeptical Acceptability (SA) and Non-Empty Existence (NE), that will be of interest in the rest of the paper.
σ-Ver Given
σ-CA Given
σ-SA Given
σ-NE Given
Their complexity is described in Table 2. In the table, “trivial” means that the answer is trivially “NO” for any instance: indeed, ∅ is conflict-free and admissible for every AF, so there is no skeptically acceptable argument with respect to conflict-freeness and admissibility.
Table 2
Complexity of σ-Ver, σ-CA, σ-SA and σ-NE, for
| Semantics σ | σ-Ver | σ-CA | σ-SA | σ-NE |
| in L | in L | trivial | in L | |
| in L | NP-c | trivial | NP-c | |
| P-c | P-c | P-c | in L | |
| in L | NP-c | coNP-c | NP-c | |
| in L | NP-c | P-c | NP-c | |
| coNP-c | NP-c | NP-c |
Finally, let us discuss the specificity of some semantics regarding the empty set and skeptical acceptability. The stable semantics is the only semantics for which there are AFs
σ-ExSA Given
3.Incomplete argumentation frameworks
In this section, we describe the first models of incompleteness in abstract argumentation, and then Incomplete Argumentation Frameworks (IAFs) that generalize both previous models. We present the complexity and algorithms for several related decision problems. We also present a particular family of semantics, initially defined for Partial AFs, a subclass of IAFs, and then generalized to the full IAF model.
3.1.Attack-incompleteness and argument-incompleteness
From a historical point of view, the first model that extends Dung’s abstract argumentation framework with incompleteness is the so-called Partial Argumentation Framework (PAF), proposed in [33]. A PAF is a tuple
While the literature on PAFs is quite sparse, the model has been later re-named as Attack-Incomplete Argumentation Framework (Att-IAF) [16]. An Att-IAF is then a tuple
Then, a similar question has been studied for Argument-Incomplete Argumentation Framework (Arg-IAF) [19], i.e. argumentation frameworks where the actual existence of some arguments is uncertain. An Arg-IAF is a tuple
The (generalized) Incomplete Argumentation Framework models situations where both arguments and attacks can be uncertain. We focus on this framework in the rest of the section, and give more details on the reasoning based on completions (similar to the approach studied in [16, 19]), and the reasoning based on redefinition of basic notions like conflict-freeness and defense (in the spirit of [29]).
3.2.The generalized IAF model
Incomplete AFs were first defined in [18], which generalizes the work from [16, 19].
Definition 5
Definition 5(Incomplete Argumentation Framework).
An Incomplete Argumentation Framework (IAF) is a tuple
Elements in A and R are called certain (or definite) arguments and attacks, while
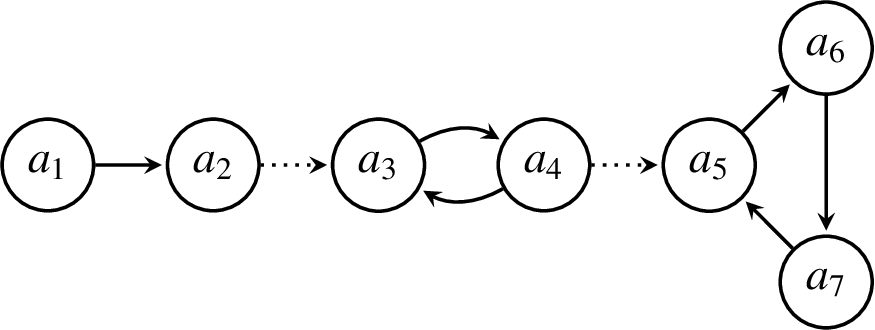
Fig. 3.
An IAF
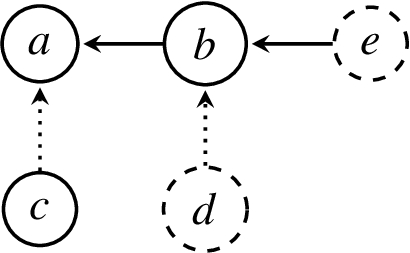
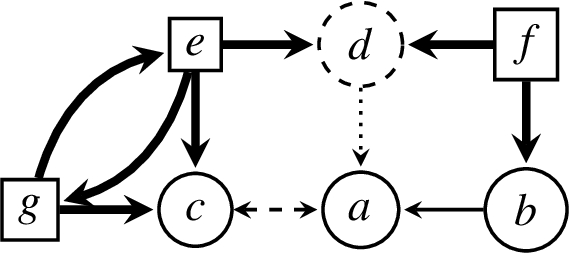
Example 4.
Figure 3 describes an IAF
The (most classical) way of reasoning with an IAF is based on the notion of completions, that are (standard) AFs corresponding to a possible resolution of the uncertainty encoded in the IAF. Before formally defining completions, we introduce a notation: given a set of attacks
Definition 6
Definition 6(Completion of an IAF).
Given an IAF
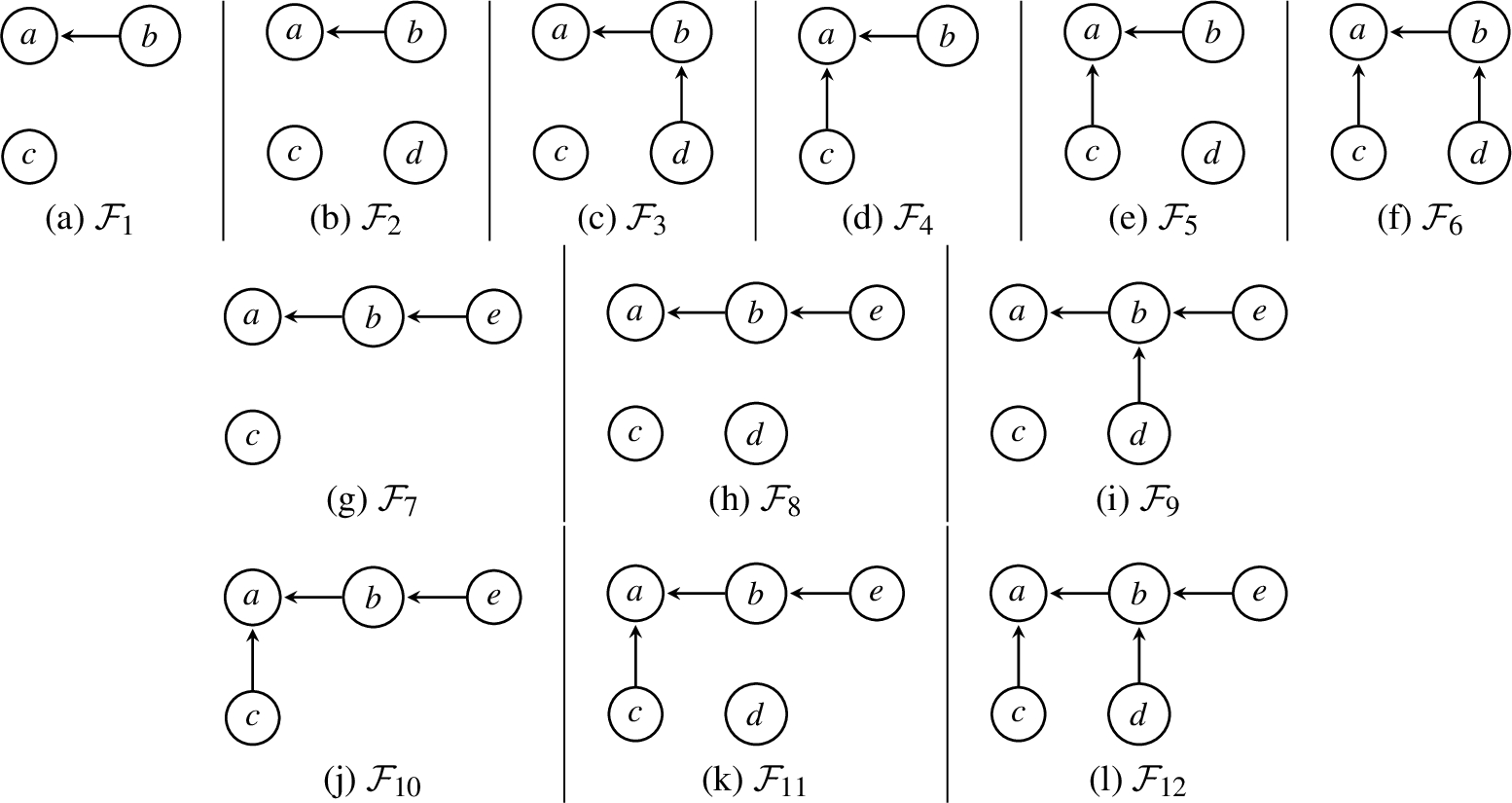
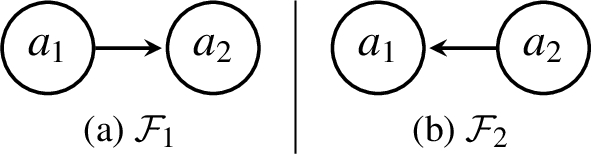
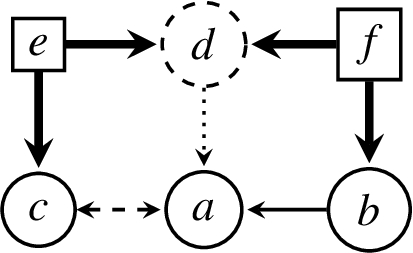
Example 5.
Figure 4 gives the completions of
This model is quite general, and includes previously defined models (i.e. those described in Section 3.1) as subclasses. First, a Partial AF (PAF) [33]
Fig. 4.
The completions of
Two families of reasoning approaches have been defined. In most of the cases, reasoning is based on the set of completions. For instance, an argument is possibly accepted if it is accepted in some completion, and necessarily accepted if it is accepted in each completion. We describe this approach in Section 3.3. Another approach (the first one, from a chronological point of view) consists in adapting the basic notions of conflict-freeness and defense, on which Dung’s semantics are based. This allows to define new semantics suited to the specific framework at hand. It was proposed in [29] for PAFs and later generalized to IAFs [65], and we describe it in Section 3.4.
3.3.Possible and necessary reasoning
Similarly to credulous and skeptical reasoning, based on a set of extensions, two modes of reasoning can be used when inference is made from a set of completions. Possible reasoning is the counterpart (for completions) of credulous reasoning (for extensions). It means that we expect some property to be satisfied in some completion. On the contrary, necessary reasoning is the counterpart (for completions) of skeptical reasoning (for extension): the property must be satisfied in each completion. A natural example where both reasoning modes make sense is a trial. There may be uncertainty arising in such scenario. The prosecutor’s goal is to prove that the defendant is guilty without any doubt, i.e. it must be a consequence of every completion. On the contrary, the defendant’s lawyer has to prove that the defendant may be innocent (this is the presumption of innocence), i.e. it must be a consequence of some completion.
Possible and necessary modes of reasoning can be combined with any decision problem of interest regarding argumentation frameworks. Interestingly, being “skeptical” about the completions does not means that the agent has to be skeptical about the extensions (and vice-versa). So, both credulous and skeptical reasoning, as well as verification and non-empty existence, have been adapted for IAFs under the possible and necessary views.
3.3.1.Complexity
Now we discuss the different reasoning problems for IAFs that have been studied in the literature, as well as their complexity.
Verification. The first study on extension verification for IAFs was described in [18]:22
σ-IncPV Given
σ-IncNV Given
Example 6.
Let us consider again
Now, consider
Finally, we show that there is no “YES” instance with
Further research on extension verification has been conducted. In [50], a set of arguments for which the answer to σ-IncPV (respectively σ-IncNV) is “YES” is called a possible (respectively necessary) i-extension. The authors identify some issues with this definition (for instance, a set of arguments could be identified as a possible i-extension even if it is not conflict-free). To remedy this issue, they define
σ-IncPV∗ Given
σ-IncNV∗ Given
Example 7.
Observe that in
We refer the interested reader to [50] for a more detailed discussion of the difference between i-extensions and
Argument acceptability. Then, the (possible and necessary) variants of credulous and skeptical acceptability are studied in [15, 17]:
σ-PCA Given
σ-NCA Given
σ-PSA Given
σ-NSA Given
Example 8.
We continue the previous example, with
Non-empty existence. The variants of non-empty existence have been defined in [77, 78]:
σ-PNE Given
σ-NNE Given
Example 9.
The IAF
Actually, [77] also mentions the “existence problem”, where the answer is true if there is an extension (empty or not). For most semantics, the answer to this question is trivially “YES” for any AF (thus, for any completion of any IAF). The only case where this problem is not trivial is the stable semantics, but then it coincides with the non-empty existence problem, so we choose not to give more details about this (less demanding) version.
The complexity of these problems under various classical semantics is summarized in Table 4.
Table 4
| σ | σ-IncPV | σ-IncNV | σ-IncPV∗ | σ-IncNV∗ | σ-PCA | σ-NCA | σ-PSA | σ-NSA | σ-PNE | σ-NNE |
| NP-c | P | P | P | NP-c | trivial | trivial | NP-c | |||
| NP-c | P | P | P | NP-c | coNP-c | NP-c | ||||
| NP-c | P | P | P | NP-c | NP-c | coNP-c | NP-c | |||
| NP-c | P | P | P | NP-c | coNP-c | NP-c | coNP-c | P | P | |
| coNP-c | coNP-c | NP-c | NP-c |
Existence and skeptical acceptability. Like in the case of classical AFs, the ExSA problem (or more precisely its adaptations to IAFs) has only been studied for
σ-PExSA Given
σ-NExSA Given
Table 5
Complexity of σ-PExSA and σ-NExSA under
| σ | σ-PExSA | σ-NExSA |
| in P | in P | |
Fig. 5.
An IAF and its two completions.
3.3.2.Algorithms
A computational method based on Boolean satisfiability has been proposed for acceptance problems in IAFs [73]. Some problems are at the first level of the polynomial hierarchy, and thus can be translated into instances of the SAT or UNSAT problems. Then, a CEGAR (CounterExample Guided Abstraction Refinement [31]) algorithm based on a SAT oracle is proposed for second level complete problems. Let us briefly describe the Boolean encodings, based on standard translation of semantics by [21].
Given an IAF
and
3.4.Direct semantics for PAFs and IAFs
Besides the possible and necessary reasoning modes described previously, [29] defines semantics for Partial AFs (recall that it corresponds to Att-IAFs, i.e. IAFs with
Definition 7
Definition 7(Conflict-freeness in PAFs).
Given a PAF
R-conflict-free if and only if
R-
Intuitively, R-conflict-freeness considers that the incompatibility between a and b, when
Fig. 6.
A PAF
Example 11.
Consider
In standard AFs, the notion of admissibility combines conflict-freeness and self-defense [44]. More precisely, Dung defines an argument a as acceptable with respect to a set of arguments S if each attacker of a is attacked by an element in S. This notion is also extended to PAFs.
Definition 8
Definition 8(Acceptability in PAFs).
Given a PAF
R-acceptable with respect to S if
R-
Similarly to R-conflict-freeness, R-acceptability considers uncertain attacks as “not serious enough” for requiring to be counterattacked. On the contrary, R-
Example 12.
Consider again
Then, different versions of admissibility can be defined by combining a notion of conflict-freeness with a notion of acceptability. More precisely:
Definition 9
Definition 9(Admissibility in PAFs).
Given a PAF
admissible if and only if S is R-conflict-free, and
R-admissible if and only if S is R-
R-
One may wonder why there is no notion of admissibility characterized by R-conflict-freeness and R-
Example 13.
Let us continue Example 12. We have seen that
The set
Then, [29] focuses on three versions of the preferred semantics, based on the different notions of admissibility defined in Definition 9.
Definition 10
Definition 10(Preferred Semantics for PAFs).
Given a PAF
a preferred extension if and only if it is a ⊆-maximal admissible set;
a R-preferred extension if and only if it is a ⊆-maximal R-admissible set;
a R-
The original paper discusses the properties of these semantics (for instance the inclusion links between different semantics, or the relations between the semantics of the PAF and the semantics of the completions) as well as computational issues. Interestingly, contrary to possible and necessary reasoning that can be harder than classical reasoning with AFs (recall Section 3.3.1), reasoning with these new semantics keep the complexity of Dung’s AFs. In particular, credulous and skeptical acceptability are (respectively) NP-complete and
This approach has been recently generalized to IAFs in [65]. The concepts of conflict-freeness and acceptability are adapted to IAFs under the names weak conflict-freeness (respectively weak defense) corresponding to R-conflict-freeness (respectively R-acceptability) and strong conflict-freeness (respectively strong defense) corresponding to R-
Table 6
Complexity of reasoning with weak and strong semantics of IAFs, where
| σ | σ-CA | σ-SA | σ-Ver |
| NP-c | trivial | in P | |
| NP-c | coNP-c | in P | |
| NP-c | in coNP | in P | |
| NP-c | coNP-c |
3.5.Rich IAFs: A closer look to uncertainty of the third kind
Besides uncertain arguments (
Definition 11
Definition 11(Rich IAF).
A Rich Incomplete Argumentation Framework (RIAF) is a tuple
The new relation
Definition 12
Definition 12(Completion of a RIAF).
Given
if
Again, we use
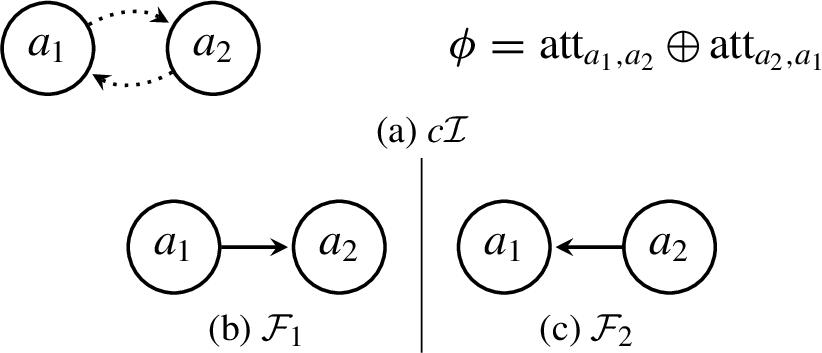
Example 14.
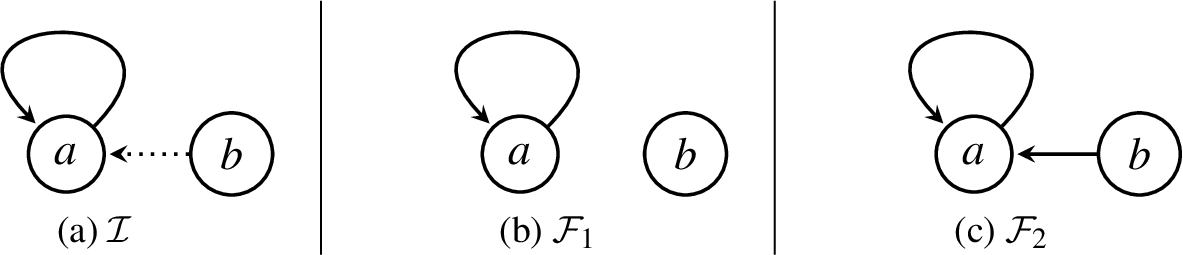
Figure 7 depicts a RIAF
Fig. 7.
The RIAF
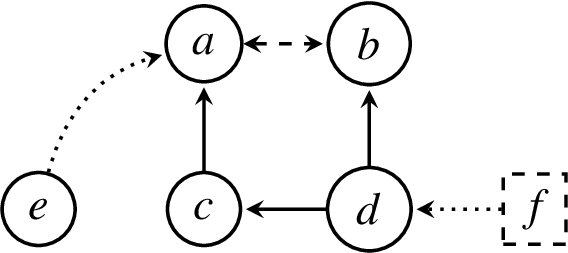
We do not give here the full set of completions of
Fig. 8.
Three completions of

Similarly, for each other configuration of
Although this richer framework is strictly more expressive than IAFs (i.e. any IAF is a RIAF, but some RIAFs cannot be translated into an equivalent IAF), the complexity of reasoning with RIAFs is the same as the complexity of reasoning with IAFs (see [63] for more details).
3.6.Restricting the set of completions
Several approaches have been proposed recently (and concurrently) that allow to restrict the set of completions of an IAF. There are several motivations to do that. As a first natural example of such motivation (borrowed from [53]), consider a situation where to agents
Fig. 9.
The possible AFs of
However, there is no simple way to represent these AFs with the formalisms presented in previous section, i.e. there is no IAF
A similar motivation is given in [66], where the issue of representing any set of AFs as the completions of a (constrained) IAF is related to AF revision [35] and merging [38] whose result might not be representable by a single AF but by a set of AFs instead.
A third motivation is the notion of correlation between arguments [51]. For instance, considering structured argumentation settings [22, 23], if
Definition 13
Definition 13(Dependency).
Given an Arg-IAF
either
or
Then, a completion of
Definition 14
Definition 14(Valid Completion w.r.t. a Dependency).
Given an Arg-IAF
An Arg-IAF with dependencies is then a pair made of an Arg-IAF
DSat Given an Arg-IAF with dependencies, is there at least one completion valid with respect to each dependency
σ-PDVer Given an Arg-IAF with dependencies and a set of argument
DSat is either trivial or NP-complete, depending on the kinds of dependencies appearing in Δ. σ-PDVer goes from trivial to
Arg-IAFs with dependencies have been generalized in [66], in two directions: the Arg-IAF is replaced by a (generalized) IAF, and the set of dependencies is replaced by a propositional formula (over the presence of arguments and attacks). This framework is called Constrained Incomplete Argumentation Framework. The constraint is expressed in a propositional language
Definition 15
Definition 15(Constrained IAF).
A Constrained Incomplete Argumentation Framework (CIAF) is a tuple
Similarly to Arg-IAFs with dependencies, only specific completions of
Fig. 10.
A CIAF and its completions.
Example 15.
Let
The main point of [66] is to prove that any set of AFs can be represented as the completions of a CIAF, and then any set of extensions can be the (union of the sets of) extensions of (the completions of) a CIAF. A similar question has been tackled independently by [53].
Proposition 1
Proposition 1([53, 66]).
Given
Proposition 2
Proposition 2([66]).
Given
Notice that [53] studies CIAFs with another definition, where the graphical structure is completely abstracted away. In this paper, a CIAF is a pair
Moreover, the relation between CIAFs and RIAFs (see Section 3.5) is also studied in [53]. It is proven there that any RIAF
Definition 16.
Given
Applying the definitions of RIAFs and CIAFs, it is easy to see that, for any RIAF
4.Control argumentation frameworks
4.1.The model
Now we describe Control Argumentation Frameworks (CAFs) [39], a model that generalizes IAFs in two ways: a new type of uncertainty is added (about the direction of an attack, i.e. the same as in RIAFs), and a new kind of arguments and attacks (named control arguments and attacks) is added. A CAF is made of three parts, that represent three types of information from the point of view of an agent:
(1) the fixed part represent information that cannot be influenced by the agent nor the environment (here, we include other agents as part of the environment), e.g. because they are legal information, or arguments that have already been stated in a debate;
(2) the uncertain part can be seen as information that can be influenced by the environment, e.g. arguments that might be used by the other agents in the next steps of the debate;
(3) finally, the control part represents information that can be influenced by the agent.
Let us formally define CAFs:
Definition 17
Definition 17(Control Argumentation Framework).
A Control Argumentation Framework (CAF) is a tuple
A,
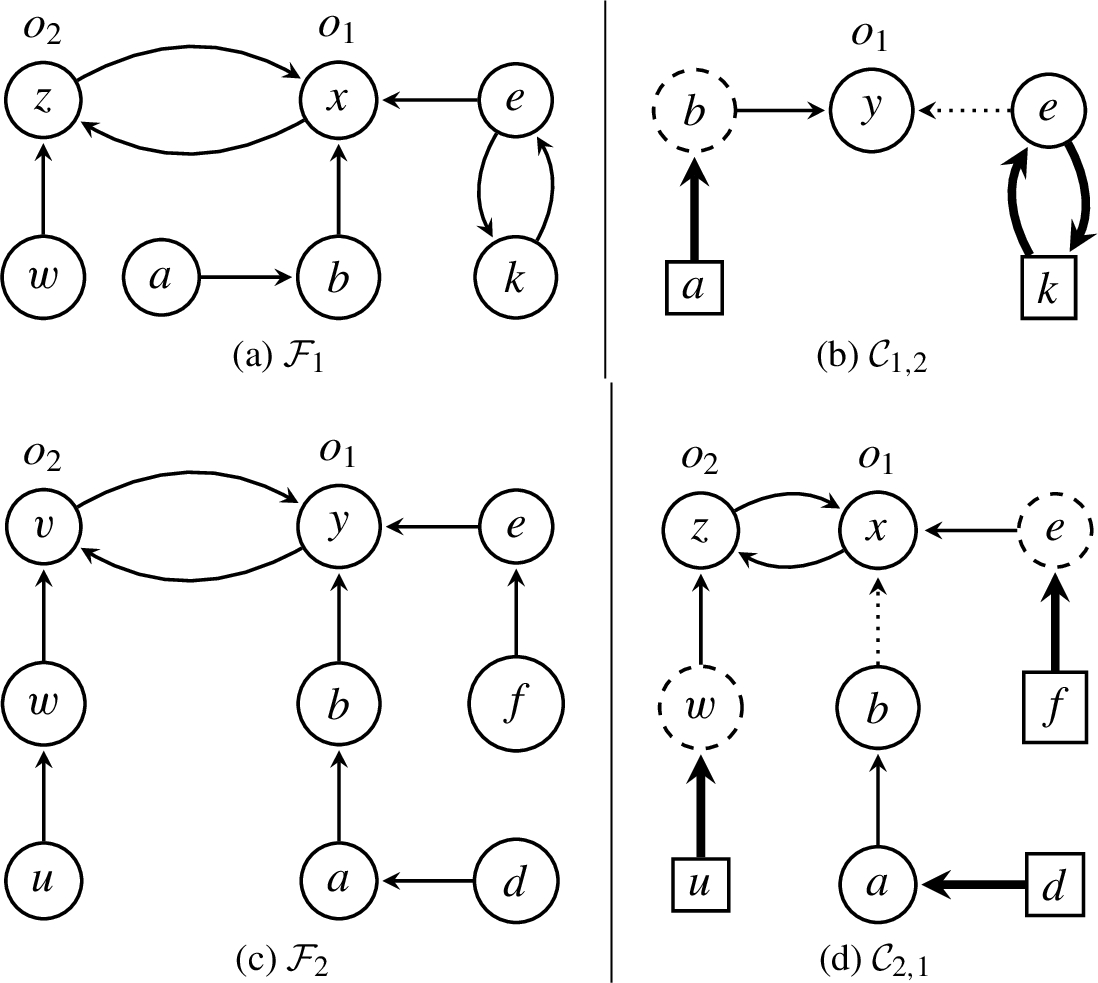
Example 16.
Figure 11 describes a CAF
The aim of an agent using a CAF is to control it with respect to some target set of arguments, i.e. make sure (by using some control arguments) that this target belongs to some (or each) extension in some (or each) completion. Let us show how the concept of completion is adapted to CAFs:
Fig. 11.
A CAF
Definition 18
Definition 18(Completion of a CAF).
Given a CAF
Finally, a configuration of the CAF is the choice of some control arguments (and the incident attacks).
Fig. 12.
A configured CAF
Definition 19
Definition 19(Control Configuration).
Given a CAF
4.2.Complexity of controllability
Controllability is the fact that an agent can configure the CAF in order to make its target set of arguments accepted. In a similar manner to arguments acceptance in IAFs, controllability has four variants: “possible” and “necessary” quantify over the set of completions, while “credulous” and “skeptical” quantify of the set of extensions. The necessary variants were first defined in [39], where it is simply called “controllability”. Then [64] defined the possible versions. Let us formally define the decision problems:
σ-PCC Given
σ-NCC Given
σ-PSC Given
σ-NSC Given
We observe that, for
Preliminary complexity results for the necessary variants were given in [39], and a more detailed analysis was given in [72]. Complexity results for the possible variants have been given in [64]. While there were no results for
Several computational approaches have been defined, based on Boolean satisfiability for the problems at the first level of the polynomial hierarchy, and quantified Boolean formulas (QBFs) [60] or CEGAR [31] for higher complexity problems. The intuition behind these approaches is similar to the one for IAFs, and again logical encodings are based on [21].
Finally, recent work [70] has adapted the work on non-emptiness from IAFs [77, 78] to CAFs:
σ-CNE Given
5.Application scenarios
Now we describe three scenarios where IAFs or CAFs are useful. First, the aggregation of several AFs into a single one is the context where IAFs (or more precisely PAFs) were first proposed. Then, we present stability, a concept initially introduced for structured argumentation. It has been proven that adapting this notion to abstract argumentation is strongly connected to reasoning with IAFs. Finally, CAFs have shown some interest in the context of automated negotiation.
5.1.AF merging
Partial AFs [33] were defined as a tool in a process of AF merging. The goal is to obtain a global view of the knowledge of a group of agents
Definition 20
Definition 20(Consensual Expansion of an AF).
Given
∗ If
∗ If
∗ Otherwise,
All the arguments that appear in one of the AFs also appear in agent
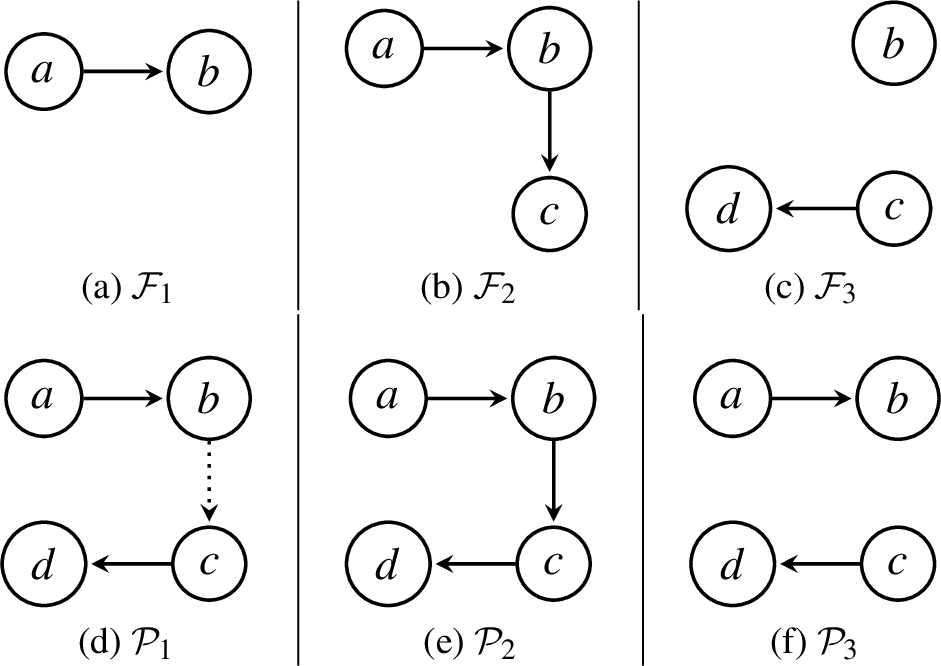
Example 18.
Figure 13 describes three AFs
The expansion of AFs into PAFs allows to compare each agent’s knowledge with the same set of arguments. The result of the merging is then a set of AFs, built on A, that minimize the (aggregated) distance with the set of PAFs that correspond to the expansions of
Fig. 13.
Three AFs
Definition 21
Definition 21(Merging Operator).
Given
The operator ⊕ can be any classical aggregation function, e.g. the sum, the max or the leximax. Here, for a matter of simplification we have only described the consensual expansion, but each agent can have her own expansion policy, which means that all the
Definition 22
Definition 22(Edit Distance).
Given two PAFs
The distance between two PAFs is defined as the sum of the scores of all the possible pairs of arguments, where the score of a pair is 0 if both PAFs agree on the nature of the pair (certain attack, uncertain attack, or absence of attack), 1 if they strongly disagree (certain attack for one PAF, absence of attack for the other one) and 0.5 otherwise (certain attack or absence of attack for one PAF, and uncertain attack for the other one). Since AFs are specific PAFs (with
Example 19.
Now we illustrate the result of the merging operator
Fig. 14.
Result of the merging.
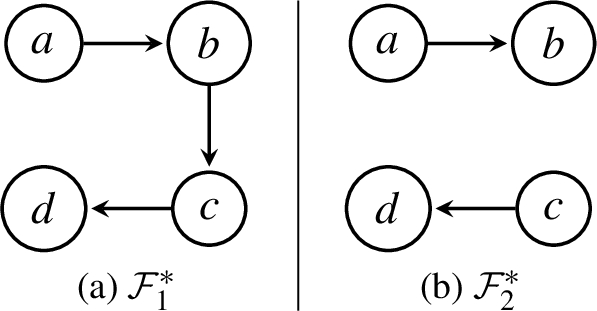
Table 8
Distances between AFs and PAFs
| ∑ | ||||
| 0.5 | 0 | 1 | 1.5 | |
| 0.5 | 1 | 0 | 1.5 |
We have
5.2.Stability
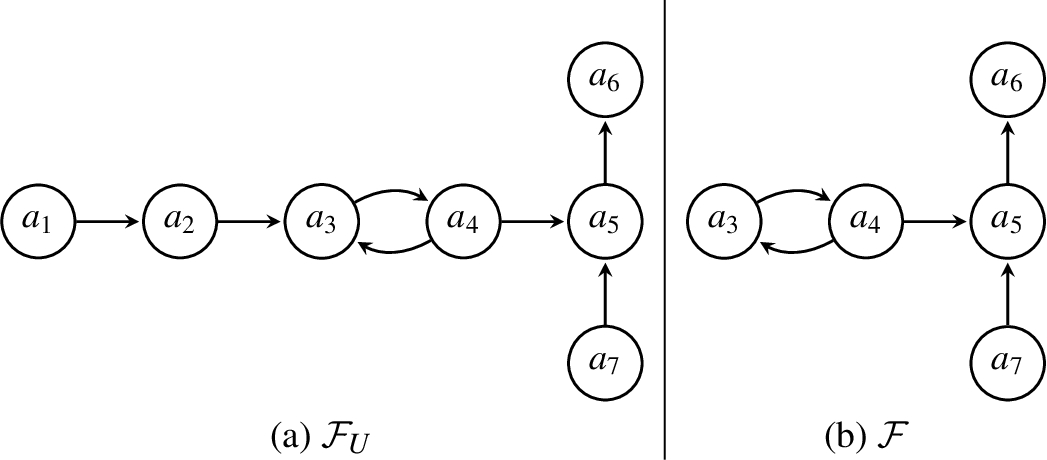
Stability was defined in a context of structured argumentation: it consists in determining whether a given literal will keep the same acceptance status with respect to the grounded semantics, whatever the argumentation setting evolutions [74, 81]. It has been applied in the design of an AI agent that helps the Dutch police in investigations about Internet trade frauds. The concept was then adapted to abstract argumentation (and generalized to other semantics) in [67], where the link with IAFs is made.
The hypothesis is made that there is an “argumentation universe”
Definition 23
Definition 23(Future Argumentation Framework).
Given an AF
Since it is assumed that any valid AF is a subgraph of
Definition 24
Definition 24(Stability).
An AF
either
or
Example 20.
Let us borrow the example from [67]. Consider the argumentation universe
Fig. 15.
The argumentation universe
It has been proven that deciding stability can be done through Arg-IAFs, i.e.
Definition 25
Definition 25(IAF Corresponding to an AF).
Given an AF
It means that all the arguments that appear in
Proposition 3.
Given an AF
either a is necessarily credulously (respectively skeptically) accepted in
or a is not possibly credulously (respectively skeptically) accepted in
Stability is still a recent research topic. As illustrated by [74, 81], it can be used to improve the communication between a software agent and a human being, stopping the dialogue when the argumentation system is stable with respect to the issue under discussion. More generally, the notion of stability is promising in argument-based dialogue systems, where it can be used either to stop the dialogue when there is no need to continue (thus saving communication resources), or for adapting an agent’s strategy. For instance, [67] presents an example of argument-based negotiation where an agent can revise her strategy when she detects that her (current) preferred argument will never be accepted. The correspondance between the notion of stability and IAF-based reasoning means that efficient computational techniques (e.g. those from [73] based on Boolean Satisfiability) can be used in all the scenarios where stability plays a role.
5.3.Automated negotiation
Let us present a last application of the frameworks described in this paper. In [40, 41], the authors use CAFs in a context of automated negotiation, where they are used to model the agent’s knowledge about her opponent. During a negotiation round, the agent uses her own personal theory (i.e. an AF) to choose her favorite offer. But then, in order to convince her opponent to accept this offer, the agent selects an argument supporting it in the CAF that models the opponent. In the case where this argument is not directly accepted by the opponent, the agent uses controllability to defend her argument with control arguments. The technical details of the approach are out of the scope of this paper, we choose to focus on an example of negotiation dialogue that allows to illustrate its main features.
Fig. 16.
Agents
Example 21.
Let
(1) Best offer selection. Agent
(2) Supporting argument selection. For convincing her opponent to accept
(3) Bidding strategy. Without using control arguments, it is impossible to convince agent
(4) Acceptance strategy. When receiving an offer, agent
(5) Update and new supporting argument selection. Agent
(6) Best offer selection. Now, agent
(7) Supporting argument selection. Using her CAF, she determines that (only) z supports the offer
(8) Bidding strategy. The agent first checks whether z can be accepted without control arguments. It is not the case, since there are completions in which w is present, and then z is not defended. Then, the control configuration
(9) Acceptance strategy. This time, receiving this offer (along with the defending argument u) makes z acceptable in
Experiments [40] have shown that using control arguments in negotiation increases the agreement rate, i.e. the percentage of negotiation that reach an agreement between both agents. Even in presence of a high level of uncertainty, the agreement rate is satisfactorily high when the opponent modeling is enough accurate and the number of control arguments is high [41].
6.Related work
The question of qualitative uncertainty has been handled in another way in [11]. In this work, the authors only consider classical AFs, but they introduce undecidedness in the arguments acceptance statuses. This is somehow a dual approach to IAFs, where uncertainty is present in the initial knowledge (presence or absence of arguments and attacks), but not in the outcome of reasoning (arguments acceptance). Several ideas are discussed. First, in some cases, it is not necessary for a particular application to give a precise status to each argument. A possible motivation for that is to avoid unnecessary computations regarding arguments that are not important, or will likely be revised in the future. For dealing with such situation, a labelling-based approach is used. Besides “traditional” labels
In this paper, we focus on qualitative uncertainty. However, there is a vast literature on quantitative uncertainty in abstract argumentation, namely on probabilistic argumentation. Two families of approaches exist. The epistemic approach (e.g. [56, 57, 82]) attaches to arguments a degree of belief, i.e. the probability (according to the agent) that the argument is acceptable. In that way, probabilistic argumentation can be seen as related to [11]. On the contrary, in the constellation approach (e.g. [52, 55, 61]), the probability is attached with the arguments and attacks; it is the probability of existence of arguments and attacks. While [55, 61] can be seen as quantitative counterparts of IAFs, [52] is the quantitative counterpart of CAFs. The correspondance between IAFs and Probabilistic Argumentation Frameworks (PrAFs) under the constellation approach has been illustrated by [15]. Each completion of a PrAFs is associated with a probability, it is thus possible (given a semantics) to determine the probability that a given set is an extension, or that a given argument is credulously (respectively skeptically) accepted. Then, it is noted that a set of arguments is a possible extension if its probability is strictly greater than 0, and a necessary extension if its probability is 1. Similarly, an argument is necessarily credulously (respectively skeptically) accepted if its probability of credulous (respectively skeptical) acceptability is 1, and it is possibly credulously (respectively skeptically) accepted if its probability of credulous (respectively skeptical) acceptability is strictly greater than 0.
Finally, let us discuss extension enforcement [12–14, 36, 84]. This operation consists in modifying an argumentation framework
7.Conclusion
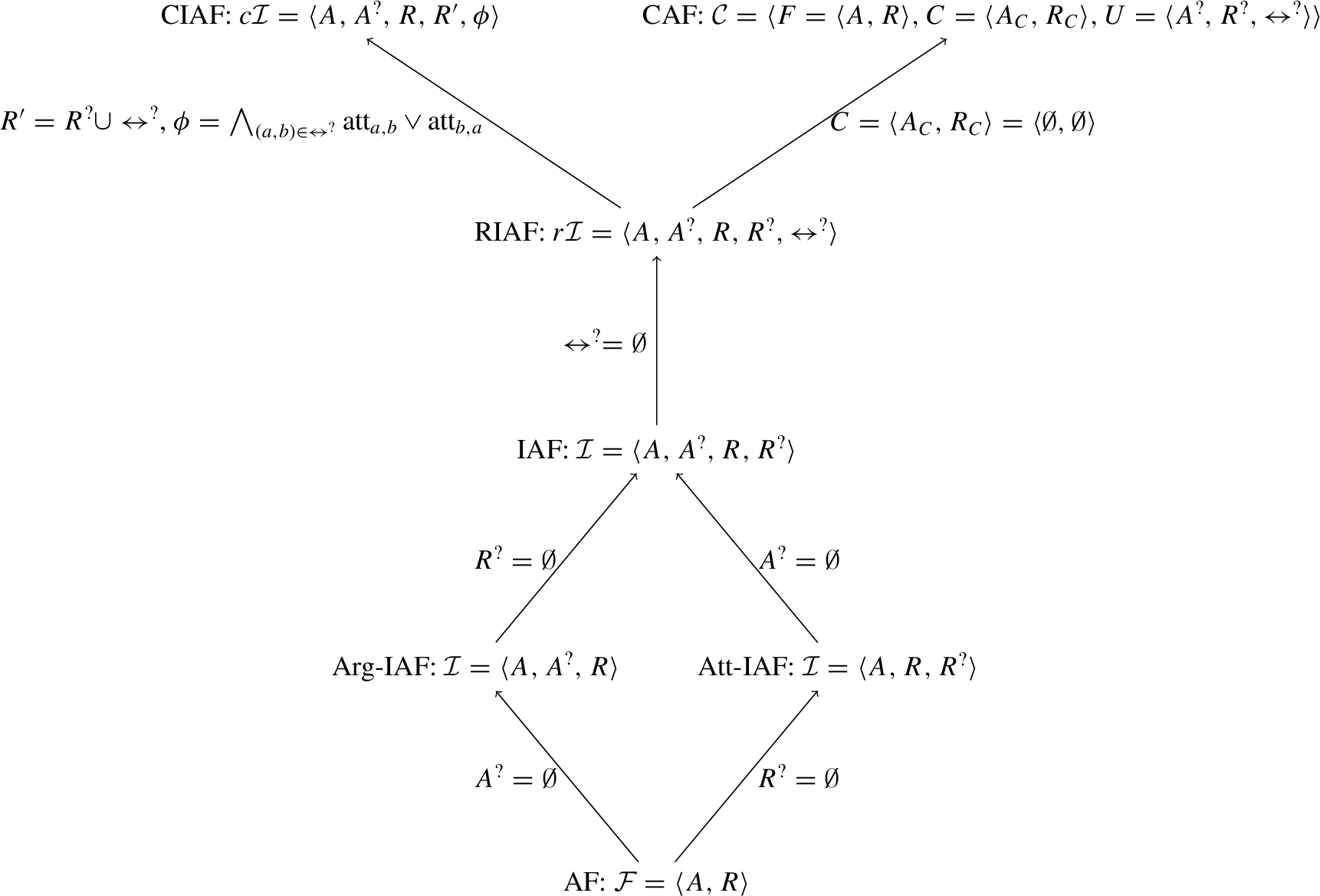
We have described the main approaches that incorporate qualitative uncertainty in abstract argumentation, namely Incomplete Argumentation Frameworks and Control Argumentation Frameworks and variants of these. Figure 17 shows the relation between these models. An arrow
Fig. 17.
Relations between Dung’s AFs and the frameworks studied in this paper.
Although these frameworks are still quite recent, they have already shown their interest in various scenarios, and it paves the way to many applications especially in multi-agent systems, where uncertain information is omnipresent, because e.g. the cost of communication forces agents to use enthymemes [25], because of trust issues between agents [80], or because of the impossibility to anticipate the environment evolution [59].
Using IAFs, as well as RIAFs, CIAFs and CAFs, in various application scenarios, seems to be a promising line of research. Besides AF merging, stability and negotiation mentioned here, potential applications include argumentation dynamics [43] (especially in logic-based argumentation with uncertain knowledge in the underlying knowledge base [62]), persuasion [27], or risk management [8]. We have identified several other promising research tracks, including the combinations of ideas discussed in this paper. For instance, controllability of CAFs could be studied in the context of the extension-based semantics introduced in [65], or with a constrained version of CAFs (using the same kinds of constraints as in [51, 53, 66]). Similarly, using IAFs instead of PAFs would provide new insights on AF merging [33]. From a more technical point of view, an interesting question consists in determining whether an instance of one of the frameworks presented here can be translated into an equivalent AF (maybe at the cost of additional arguments or attacks, like in the case of Extended AFs [68, 69] or Bipolar AFs [30]). This would allow to use existing algorithms dedicated to Dung’s AFs for reasoning with these more expressive frameworks. Naturally, the complexity gap for some of these problems means that such translation may not be polynomially doable in some cases. This question should be investigated in depth to identify subclasses of IAFs/CAFs with better computational properties than the general case.
Real world applications of formal argumentation may require a complex combination of different generalizations of Dung’s model. A natural question, for instance, is how to combine qualitative uncertainty and bipolar argumentation, i.e. how to add (uncertain) supports [3, 30] to IAFs. This may also lead to an interesting combination of IAFs (or CAFs) with various frameworks like Weighted AFs [46], Strength-based AFs [76], Value-based AFs [20] or AFs with collective attacks (SETAFs) [71]. The question would then be to determine which arguments are acceptable when the agent is not sure about the weight of some attacks, the strength or the value of some arguments, or the existence of some sub-attack in a collective attack.
Finally, while ranking-based (or gradual) methods for argument acceptability have been a hot topic in the last years (see e.g. [1, 5, 26, 37]), there is no such approach for IAFs yet. This would provide valuable methods for contexts where a more fine-grained reasoning mechanism than a binary acceptability degree is required.
Notes
1 Whether the opposite inclusions hold or not is still an open problem at the time of writing. See e.g. https://www.claymath.org/millennium-problems/p-vs-np-problem.
3 Equivalently,
4 It is also proven in [70] that
References
[1] | L. Amgoud and J. Ben-Naim, Ranking-based semantics for argumentation frameworks, in: Proceedings of the 7th International Conference on Scalable Uncertainty Management (SUM 2013), Vol. 8078: , Springer, (2013) , pp. 134–147. doi:10.1007/978-3-642-40381-1_11. |
[2] | L. Amgoud and C. Cayrol, A reasoning model based on the production of acceptable arguments, Ann. Math. Artif. Intell. 34: (1–3) ((2002) ), 197–215. doi:10.1023/A:1014490210693. |
[3] | L. Amgoud, C. Cayrol, M. Lagasquie-Schiex and P. Livet, On bipolarity in argumentation frameworks, Int. J. Intell. Syst. 23: (10) ((2008) ), 1062–1093. doi:10.1002/int.20307. |
[4] | L. Amgoud, Y. Dimopoulos and P. Moraitis, A unified and general framework for argumentation-based negotiation, in: 6th International Joint Conference on Autonomous Agents and Multiagent Systems (AAMAS 2007), IFAAMAS, (2007) , p. 158. |
[5] | L. Amgoud and D. Doder, Gradual semantics accounting for varied-strength attacks, in: Proceedings of the 18th International Conference on Autonomous Agents and MultiAgent Systems, AAMAS ’19, Montreal, QC, Canada, May 13–17, 2019, (2019) , pp. 1270–1278. |
[6] | L. Amgoud and H. Prade, Using arguments for making and explaining decisions, Artif. Intell. 173: (3–4) ((2009) ), 413–436. doi:10.1016/j.artint.2008.11.006. |
[7] | S. Arora and B. Barak, Computational Complexity – A Modern Approach, Cambridge University Press, (2009) , http://www.cambridge.org/catalogue/catalogue.asp?isbn=9780521424264. ISBN 978-0-521-42426-4. |
[8] | T. Aven and O. Renn, Risk management, in: Risk Management and Governance: Concepts, Guidelines and Applications, Springer, Berlin, Heidelberg, (2010) , pp. 121–158. ISBN 978-3-642-13926-0. doi:10.1007/978-3-642-13926-0_8. |
[9] | P. Baroni, M. Caminada and M. Giacomin, Abstract argumentation frameworks and their semantics, in: Handbook of Formal Argumentation, P. Baroni, D. Gabbay, M. Giacomin and L. van der Torre, eds, College Publications, (2018) , pp. 159–236. |
[10] | P. Baroni, M. Giacomin and B. Liao, Dealing with unknowability in formal argumentation, in: Proceedings of the 1st Workshop on Advances in Argumentation in Artificial Intelligence Co-Located with XVI International Conference of the Italian Association for Artificial Intelligence, AI3@AI*IA 2017, (2017) , pp. 73–78. |
[11] | P. Baroni, M. Giacomin and B.S. Liao, I don’t care, I don’t know … I know too much! On incompleteness and undecidedness in abstract argumentation, in: Advances in Knowledge Representation, Logic Programming, and Abstract Argumentation – Essays Dedicated to Gerhard Brewka on the Occasion of His 60th Birthday, (2015) , pp. 265–280. doi:10.1007/978-3-319-14726-0_18. |
[12] | R. Baumann, What does it take to enforce an argument? Minimal change in abstract argumentation, in: Proceedings of the 20th European Conference on Artificial Intelligence (ECAI 2012), (2012) , pp. 127–132. |
[13] | R. Baumann and G. Brewka, Expanding argumentation frameworks: Enforcing and monotonicity results, in: 3rd International Conference on Computational Models of Argument (COMMA 2010), (2010) , pp. 75–86. |
[14] | R. Baumann, S. Doutre, J.-G. Mailly and J.P. Wallner, Enforcement in formal argumentation, in: Handbook of Formal Argumentation, D. Gabbay, M. Giacomin, G. Simari and M. Thimm, eds, College Publications, (2021) , pp. 159–236. To appear in 2021. |
[15] | D. Baumeister, M. Järvisalo, D. Neugebauer, A. Niskanen and J. Rothe, Acceptance in incomplete argumentation frameworks, Artif. Intell. 295: ((2021) ), 103470. doi:10.1016/j.artint.2021.103470. |
[16] | D. Baumeister, D. Neugebauer and J. Rothe, Verification in attack-incomplete argumentation frameworks, in: 4th International Conference on Algorithmic Decision Theory (ADT 2015), (2015) , pp. 341–358. doi:10.1007/978-3-319-23114-3_21. |
[17] | D. Baumeister, D. Neugebauer and J. Rothe, Credulous and skeptical acceptance in incomplete argumentation frameworks, in: 7th International Conference on Computational Models of Argument (COMMA 2018), (2018) , pp. 181–192. |
[18] | D. Baumeister, D. Neugebauer, J. Rothe and H. Schadrack, Verification in incomplete argumentation frameworks, Artif. Intell. 264: ((2018) ), 1–26. doi:10.1016/j.artint.2018.08.001. |
[19] | D. Baumeister, J. Rothe and H. Schadrack, Verification in argument-incomplete argumentation frameworks, in: 4th International Conference on Algorithmic Decision Theory (ADT 2015), (2015) , pp. 359–376. doi:10.1007/978-3-319-23114-3_22. |
[20] | T.J.M. Bench-Capon, Value-based argumentation frameworks, in: 9th International Workshop on Non-monotonic Reasoning (NMR 2002), Toulouse, France, April 19–21, Proceedings, S. Benferhat and E. Giunchiglia, eds, (2002) , pp. 443–454. |
[21] | P. Besnard and S. Doutre, Checking the acceptability of a set of arguments, in: 10th International Workshop on Non-monotonic Reasoning (NMR 2004), (2004) , pp. 59–64. |
[22] | P. Besnard, A.J. García, A. Hunter, S. Modgil, H. Prakken, G.R. Simari and F. Toni, Introduction to structured argumentation, Argument Comput. 5: (1) ((2014) ), 1–4. doi:10.1080/19462166.2013.869764. |
[23] | P. Besnard and A. Hunter, Elements of Argumentation, MIT Press, (2008) . ISBN 978-0-262-02643-7. |
[24] | P. Besnard and A. Hunter, Argumentation based on classical logic, in: Argumentation in Artificial Intelligence, G.R. Simari and I. Rahwan, eds, (2009) , pp. 133–152. doi:10.1007/978-0-387-98197-0_7. |
[25] | E. Black and A. Hunter, A relevance-theoretic framework for constructing and deconstructing enthymemes, J. Log. Comput. 22: (1) ((2012) ), 55–78. doi:10.1093/logcom/exp064. |
[26] | E. Bonzon, J. Delobelle, S. Konieczny and N. Maudet, A comparative study of ranking-based semantics for abstract argumentation, in: Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence, Phoenix, Arizona, USA, February 12–17, 2016, D. Schuurmans and M.P. Wellman, eds, AAAI Press, (2016) , pp. 914–920. |
[27] | E. Bonzon, J. Delobelle, S. Konieczny and N. Maudet, A parametrized ranking-based semantics for persuasion, in: 11th International Conference on Scalable Uncertainty Management (SUM 2017), Springer, (2017) , pp. 237–251. doi:10.1007/978-3-319-67582-4_17. |
[28] | M. Caminada, On the issue of reinstatement in argumentation, in: 10th European Conference on Logics in Artificial Intelligence (JELIA 2006), Springer, (2006) , pp. 111–123. doi:10.1007/11853886_11. |
[29] | C. Cayrol, C. Devred and M. Lagasquie-Schiex, Handling ignorance in argumentation: Semantics of partial argumentation frameworks, in: 9th European Conference on Symbolic and Quantitative Approaches to Reasoning with Uncertainty (ECSQARU 2007), (2007) , pp. 259–270. doi:10.1007/978-3-540-75256-1_25. |
[30] | C. Cayrol and M. Lagasquie-Schiex, Coalitions of arguments: A tool for handling bipolar argumentation frameworks, Int. J. Intell. Syst. 25: (1) ((2010) ), 83–109. doi:10.1002/int.20389. |
[31] | E.M. Clarke, O. Grumberg, S. Jha, Y. Lu and H. Veith, Counterexample-guided abstraction refinement for symbolic model checking, J. ACM 50: (5) ((2003) ), 752–794. doi:10.1145/876638.876643. |
[32] | S.A. Cook, The complexity of theorem-proving procedures, in: Proceedings of the 3rd Annual ACM Symposium on Theory of Computing, Shaker Heights, Ohio, USA, May 3–5, 1971, (1971) , pp. 151–158. |
[33] | S. Coste-Marquis, C. Devred, S. Konieczny, M. Lagasquie-Schiex and P. Marquis, On the merging of Dung’s argumentation systems, Artif. Intell. 171: (10–15) ((2007) ), 730–753. doi:10.1016/j.artint.2007.04.012. |
[34] | S. Coste-Marquis, C. Devred and P. Marquis, Symmetric argumentation frameworks, in: Symbolic and Quantitative Approaches to Reasoning with Uncertainty, 8th European Conference, ECSQARU 2005, Barcelona, Spain, July 6–8, 2005, Proceedings, (2005) , pp. 317–328. |
[35] | S. Coste-Marquis, S. Konieczny, J.-G. Mailly and P. Marquis, On the revision of argumentation systems: Minimal change of arguments statuses, in: Principles of Knowledge Representation and Reasoning: Proceedings of the Fourteenth International Conference, KR 2014, Vienna, Austria, July 20–24, 2014, (2014) . |
[36] | S. Coste-Marquis, S. Konieczny, J.-G. Mailly and P. Marquis, Extension enforcement in abstract argumentation as an optimization problem, in: Proceedings of the Twenty-Fourth International Joint Conference on Artificial Intelligence (IJCAI 2015), (2015) , pp. 2876–2882. |
[37] | J. Delobelle, Ranking-based semantics for abstract argumentation (Sémantique à base de classement pour l’argumentation abstraite), PhD thesis, Artois University, Arras, France, 2017. https://tel.archives-ouvertes.fr/tel-01937279. |
[38] | J. Delobelle, A. Haret, S. Konieczny, J.-G. Mailly, J. Rossit and S. Woltran, Merging of abstract argumentation frameworks, in: Principles of Knowledge Representation and Reasoning: Proceedings of the Fifteenth International Conference, KR 2016, Cape Town, South Africa, April 25–29, 2016, (2016) , pp. 33–42. |
[39] | Y. Dimopoulos, J.-G. Mailly and P. Moraitis, Control argumentation frameworks, in: 32nd AAAI Conference on Artificial Intelligence (AAAI 2018), (2018) , pp. 4678–4685. |
[40] | Y. Dimopoulos, J.-G. Mailly and P. Moraitis, Argumentation-based negotiation with incomplete opponent profiles, in: 18th International Conference on Autonomous Agents and MultiAgent Systems (AAMAS 2019), (2019) , pp. 1252–1260. |
[41] | Y. Dimopoulos, J.-G. Mailly and P. Moraitis, Arguing and negotiating using incomplete negotiators profiles, Autonomous Agents and Multi-Agent Systems 35: (2) ((2021) ). |
[42] | Y. Dimopoulos and A. Torres, Graph theoretical structures in logic programs and default theories, Theor. Comput. Sci. 170: (1–2) ((1996) ), 209–244. doi:10.1016/S0304-3975(96)80707-9. |
[43] | S. Doutre and J.-G. Mailly, Constraints and changes: A survey of abstract argumentation dynamics, Argument Comput. 9: (3) ((2018) ), 223–248. doi:10.3233/AAC-180425. |
[44] | P.M. Dung, On the acceptability of arguments and its fundamental role in nonmonotonic reasoning, logic programming and n-person games, Artif. Intell. 77: (2) ((1995) ), 321–358. doi:10.1016/0004-3702(94)00041-X. |
[45] | P.E. Dunne and T.J.M. Bench-Capon, Coherence in finite argument systems, Artif. Intell. 141: (1/2) ((2002) ), 187–203. doi:10.1016/S0004-3702(02)00261-8. |
[46] | P.E. Dunne, A. Hunter, P. McBurney, S. Parsons and M.J. Wooldridge, Weighted argument systems: Basic definitions, algorithms, and complexity results, Artif. Intell. 175: (2) ((2011) ), 457–486. doi:10.1016/j.artint.2010.09.005. |
[47] | P.E. Dunne and M.J. Wooldridge, Complexity of abstract argumentation, in: Argumentation in Artificial Intelligence, (2009) , pp. 85–104. doi:10.1007/978-0-387-98197-0_5. |
[48] | W. Dvorák and P.E. Dunne, Computational problems in formal argumentation and their complexity, in: Handbook of Formal Argumentation, P. Baroni, D. Gabbay, M. Giacomin and L. van der Torre, eds, College Publications, (2018) , pp. 631–688. |
[49] | W. Dvorák and S. Woltran, On the intertranslatability of argumentation semantics, J. Artif. Intell. Res. 41: ((2011) ), 445–475. doi:10.1613/jair.3318. |
[50] | B. Fazzinga, S. Flesca and F. Furfaro, Revisiting the notion of extension over incomplete abstract argumentation frameworks, in: 29th International Joint Conference on Artificial Intelligence (IJCAI 2020), (2020) , pp. 1712–1718. |
[51] | B. Fazzinga, S. Flesca and F. Furfaro, Reasoning over argument-incomplete AAFs in the presence of correlations, in: Proceedings of the Thirtieth International Joint Conference on Artificial Intelligence, IJCAI 2021, Virtual Event, Montreal, Canada, 19–27 August 2021, Z. Zhou, ed., ijcai.org, (2021) , pp. 189–195. |
[52] | F. Gaignier, Y. Dimopoulos, J.-G. Mailly and P. Moraitis, Probabilistic control argumentation frameworks, in: Proceedings of the 20th International Conference on Autonomous Agents and MultiAgent Systems (AAMAS ’21), (2021) , pp. 519–527. |
[53] | A. Herzig and A. Yuste-Ginel, Abstract argumentation with qualitative uncertainty: An analysis in dynamic logic, in: Proceedings of the Fourth International Conference on Logic and Argumentation (CLAR ’21), (2021) . |
[54] | M.J.H. Heule, M. Järvisalo and M. Suda, SAT competition 2018, J. Satisf. Boolean Model. Comput. 11: (1) ((2019) ), 133–154. |
[55] | A. Hunter, Probabilistic qualification of attack in abstract argumentation, Int. J. Approx. Reasoning 55: (2) ((2014) ), 607–638. doi:10.1016/j.ijar.2013.09.002. |
[56] | A. Hunter and M. Thimm, On partial information and contradictions in probabilistic abstract argumentation, in: Proceedings of the Fifteenth International Conference on Principles of Knowledge Representation and Reasoning (KR ’16), (2016) , pp. 53–62. |
[57] | A. Hunter and M. Thimm, Probabilistic reasoning with abstract argumentation frameworks, J. Artif. Intell. Res. 59: ((2017) ), 565–611. doi:10.1613/jair.5393. |
[58] | H. Jakobovits and D. Vermeir, Robust semantics for argumentation frameworks, J. Log. Comput. 9: (2) ((1999) ), 215–261. doi:10.1093/logcom/9.2.215. |
[59] | H. Katsuno and A.O. Mendelzon, On the difference between updating a knowledge base and revising it, in: 2nd International Conference on Principles of Knowledge Representation and Reasoning (KR 1991), (1991) , pp. 387–394. |
[60] | H. Kleine Büning and U. Bubeck, Theory of quantified Boolean formulas, in: Handbook of Satisfiability, (2009) , pp. 735–760. |
[61] | H. Li, N. Oren and T.J. Norman, Probabilistic argumentation frameworks, in: Proceedings of the First International Workshop on Theory and Applications of Formal Argumentation (TAFA ’11), (2011) , pp. 1–16. |
[62] | J.-G. Mailly, Using enthymemes to fill the gap between logical argumentation and revision of abstract argumentation frameworks, CoRR abs/1603.08789 (2016), Accepted at NMR 2016. http://arxiv.org/abs/1603.08789. |
[63] | J.-G. Mailly, A note on rich incomplete argumentation frameworks, CoRR abs/2009.04869 (2020). https://arxiv.org/abs/2009.04869. |
[64] | J.-G. Mailly, Possible controllability of control argumentation frameworks, in: 8th International Conference on Computational Models of Argument (COMMA 2020), (2020) , pp. 283–294. |
[65] | J.-G. Mailly, Extension-based semantics for incomplete argumentation frameworks, in: Proceedings of the Fourth International Conference on Logic and Argumentation (CLAR ’21), (2021) . |
[66] | J.-G. Mailly, Constrained incomplete argumentation frameworks, in: Proceedings of the 16th European Conference on Symbolic and Quantitative Approaches to Reasoning with Uncertainty (ECSQARU ’21), J. Vejnarová and N. Wilson, eds, Lecture Notes in Computer Science, Vol. 12897: , Springer, (2021) , pp. 103–116. doi:10.1007/978-3-030-86772-0_8. |
[67] | J.-G. Mailly and J. Rossit, Stability in abstract argumentation, CoRR abs/2012.12588 (2020), Accepted at NMR 2020. https://arxiv.org/abs/2012.12588. |
[68] | S. Modgil, Reasoning about preferences in argumentation frameworks, Artif. Intell. 173: (9–10) ((2009) ), 901–934. doi:10.1016/j.artint.2009.02.001. |
[69] | S. Modgil and T.J.M. Bench-Capon, Metalevel argumentation, J. Log. Comput. 21: (6) ((2011) ), 959–1003. doi:10.1093/logcom/exq054. |
[70] | D. Neugebauer, J. Rothe and K. Skiba, Complexity of nonemptiness in control argumentation frameworks, in: Proceedings of the 16th European Conference on Symbolic and Quantitative Approaches to Reasoning with Uncertainty (ECSQARU ’21), J. Vejnarová and N. Wilson, eds, Lecture Notes in Computer Science, Vol. 12897: , Springer, (2021) , pp. 117–129. doi:10.1007/978-3-030-86772-0_9. |
[71] | S.H. Nielsen and S. Parsons, A generalization of Dung’s abstract framework for argumentation: Arguing with sets of attacking arguments, in: Proceedings of the Third International Workshop on Argumentation in Multi-Agent Systems (ArgMAS 2006), (2006) , pp. 54–73. |
[72] | A. Niskanen, D. Neugebauer and M. Järvisalo, Controllability of control argumentation frameworks, in: Proceedings of the Twenty-Ninth International Joint Conference on Artificial Intelligence, IJCAI 2020, (2020) , pp. 1855–1861. |
[73] | A. Niskanen, D. Neugebauer, M. Järvisalo and J. Rothe, Deciding acceptance in incomplete argumentation frameworks, in: 34th AAAI Conference on Artificial Intelligence (AAAI 2020), (2020) , pp. 2942–2949. |
[74] | D. Odekerken, A. Borg and F. Bex, Estimating stability for efficient argument-based inquiry, in: 8th International Conference on Computational Models of Argument (COMMA 2020), IOS Press, (2020) , pp. 307–318. |
[75] | C. Papadimitriou and M. Yannakakis, The complexity of facets (and some facets of complexity), Journal of Computer and System Sciences 28: ((1984) ), 244–259. doi:10.1016/0022-0000(84)90068-0. |
[76] | J. Rossit, J.-G. Mailly, Y. Dimopoulos and P. Moraitis, United we stand: Accruals in strength-based argumentation, Argument Comput. 12: (1) ((2021) ), 87–113. doi:10.3233/AAC-200904. |
[77] | K. Skiba, D. Neugebauer and J. Rothe, Complexity of possible and necessary existence problems in abstract argumentation, in: 24th European Conference on Artificial Intelligence (ECAI 2020), (2020) , pp. 897–904. |
[78] | K. Skiba, D. Neugebauer and J. Rothe, Complexity of nonempty existence problems in incomplete argumentation frameworks, IEEE Intell. Syst. 36: (2) ((2021) ), 13–24. doi:10.1109/MIS.2020.3046782. |
[79] | L. Stockmeyer, The polynomial-time hierarchy, Theoretical Computer Science 3: ((1976) ), 1–22. doi:10.1016/0304-3975(76)90061-X. |
[80] | Y. Tang, K. Cai, P. McBurney, E. Sklar and S. Parsons, Using argumentation to reason about trust and belief, J. Log. Comput. 22: (5) ((2012) ), 979–1018. doi:10.1093/logcom/exr038. |
[81] | B. Testerink, D. Odekerken and F. Bex, A method for efficient argument-based inquiry, in: 13th International Conference on Flexible Query Answering Systems (FQAS 2019), Springer, (2019) , pp. 114–125. doi:10.1007/978-3-030-27629-4_13. |
[82] | M. Thimm, A probabilistic semantics for abstract argumentation, in: Proceedings of the 20th European Conference on Artificial Intelligence (ECAI ’12), IOS Press, (2012) , pp. 750–755. |
[83] | J.P. Wallner, Structural constraints for dynamic operators in abstract argumentation, Argument Comput. 11: (1–2) ((2020) ), 151–190. doi:10.3233/AAC-190471. |
[84] | J.P. Wallner, A. Niskanen and M. Järvisalo, Complexity results and algorithms for extension enforcement in abstract argumentation, J. Artif. Intell. Res. 60: ((2017) ), 1–40. doi:10.1613/jair.5415. |


