
Continuous multi-query optimization for subgraph matching over dynamic graphs
Abstract
There is a growing need to perform real-time analytics on dynamic graphs in order to deliver the values of big data to users. An important problem from such applications is continuously identifying and monitoring critical patterns when fine-grained updates at a high velocity occur on the graphs. A lot of efforts have been made to develop practical solutions for these problems. Despite the efforts, existing algorithms showed limited running time and scalability in dealing with large and/or many graphs. In this paper, we study the problem of continuous multi-query optimization for subgraph matching over dynamic graph data. (1) We propose annotated query graph, which is obtained by merging the multi-queries into one. (2) Based on the annotated query, we employ a concise auxiliary data structure to represent partial solutions in a compact form. (3) In addition, we propose an efficient maintenance strategy to detect the affected queries for each update and report corresponding matches in one pass. (4) Extensive experiments over real-life and synthetic datasets verify the effectiveness and efficiency of our approach and confirm a two orders of magnitude improvement of the proposed solution.
1.Introduction
Dynamic graphs emerge in different domains, such as financial transaction network, mobile communication network, data center network [20–22], uncertain network [2], etc. These graphs usually contain a very large number of vertices with different attributes, and have complex relationships among vertices. In addition, these graphs are highly dynamic with frequent updates of edge insertions and deletions.
Identifying and monitoring critical patterns in a dynamic graph is important in various application domains [8] such as fraud detection, cyber security, and emergency response, etc. For example, cyber security applications should detect cyber intrusions and attacks in computer network traffic as soon as they appear in the data graph [3]. In order to identify and monitor such patterns, existing work [3,13,15] studies the continuous subgraph matching problem that focuses on a-query-at-a-time. Given an initial graph G, a graph update stream
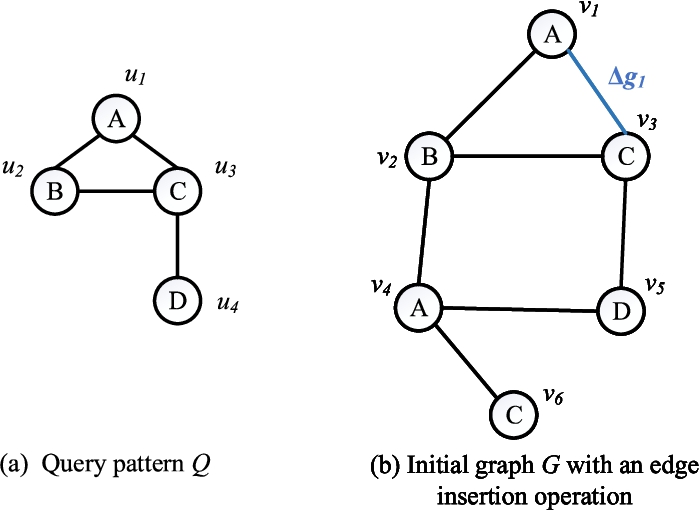
Example 1.
Figure 1 shows an example of continuous subgraph matching. Given a query pattern Q as show in Fig. 1(a), and an initial graph G with an edge insertion operation
Fig. 1.
An example of continuous subgraph matching.
However, these applications deal with dynamic graphs in such a setup that is often essential to be able to support hundreds or thousands of continuous queries simultaneously. Optimizing and answering each query separately over the dynamic graph is not always the most efficient. Zervakis et al. [30] first propose a continuous multi-query process engine, namely, TRIC, on the dynamic graph. It decomposes the query graphs into minimum covering paths and constructs an index. Whenever an update occurs, it continuously evaluates queries by leveraging on the shared restrictions present in query sets. Although TRIC can achieve a better performance than a-query-at-a-time approaches, it still has some serious performance problems. (1) TRIC needs to maintain a large number of materialized views, leading to worse performance in storage cost. (2) Since TRIC decomposes each query graph Q in the queries set into a set of path conjuncts, and it will cause inevitably expensive join and exploration cost for the large sets of query paths; and (3) TRIC has an expensive maintenance cost of materialized results when updates occur on the graph.
These problems of existing methods motivated us to develop a novel concept of annotated query graph (AQG), which is obtained by merging all the queries into one. Similar to prior multi-query optimization approaches, our technique relies on sharing computation to speed up query processing. Each edge e in the AQG is annotated by the queries that contain e. In order to avoid executing subgraph pattern matching repeatedly whenever some edges expire or some new edges arrive, we need to construct an auxiliary data structure to record some intermediate query results. Note that data-centric representation of intermediate results is claimed to have the best performance in storage cost [15]. It maintains candidate query vertices for each data vertex using a graph structure such that a data vertex can appear at most once. In this paper, we also adopt this solution and construct a newly data-centric auxiliary data structure, namely, MDCG, based on the equivalent query tree of AQG. The purpose is to take advantage of the pruning power of all edges in AQG, and execute fast query evaluation by leveraging tree structure.
In summary, our contributions are:
– We propose an efficient continuous multi-query matching system, IncMQO, to resolve the problems of existing methods.
– We define annotated query graph, in which corresponding matching results can be obtained in one pass instead of multiple.
– We construct a newly data-centric auxiliary data structure based on the equivalent query tree of the annotated query graph to represent the partial solution in a compact form.
– We propose an incremental maintenance strategy to efficiently maintain the intermediate results in MDCG for each update and quickly detect the affected queries. Then we propose an efficient matching order for the annotated query to conduct subgraph pattern matching.
We experimentally evaluate the proposed solution using three different datasets, and compare the performance against the three baselines. The experiment results show that our solution can achieve up to two orders of magnitude improvement in query processing time against the sequential processing strategy.
2.Preliminaries and framework
In this section, we first introduce several essential notions and formalize the continuous multi-query processing over dynamic graphs problem. Then, we overview the proposed solution.
2.1.Preliminaries
We focus on a labeled undirected graph
Definition 1
Definition 1(Graph Update Stream).
A graph update stream
A dynamic graph abstracts an initial graph G and an update stream
Definition 2
Definition 2(Subgraph homomorphism).
Given a query graph
Since subgraph isomorphism can be obtained by just checking the injective constraint [15], we use the subgraph homomorphism as our default matching semantics. Note that we omit edge labels for ease of explanation, while the actual implementation of our solution and our experiments support edge labels.
Based on the above definitions, let us now define the problem of multi-query processing over dynamic graphs.
Problem statement Given a set of query graphs
2.2.Overview of solution
In this subsection, we overview the proposed solution, which is referred to as IncMQO. Specially, we are to address two technical challenges:
– Representation of intermediate results should be compact and can be used to calculate the corresponding matches of affected queries in one pass.
– Update operation needs to be efficient such that the intermediate results can be maintained incrementally to quickly detect the affected queries.
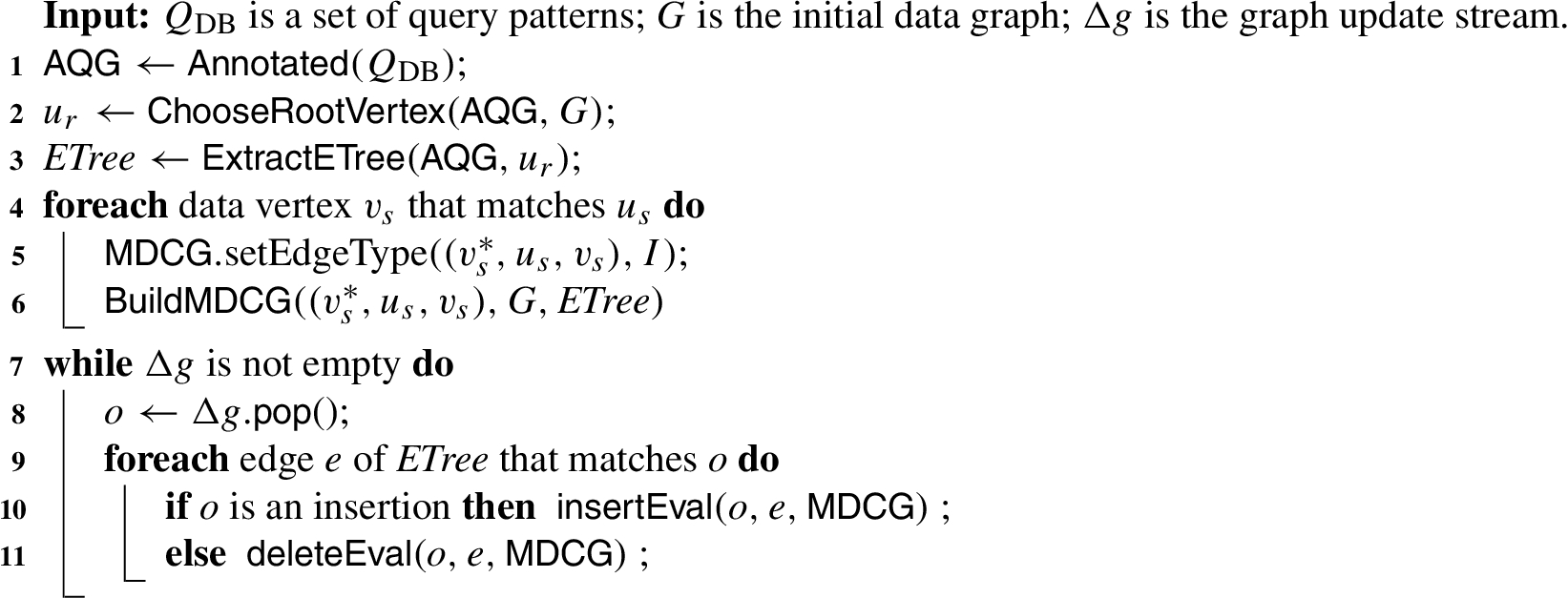
Algorithm 1 shows the outline of IncMQO, which takes an initial data graph G, a graph update stream
Algorithm 1:
IncMQO
3.Continuous multi-query processing model
When an edge update occurs, it is costly to conduct sequential query processing. The central idea of multi-query handling is to employ a delicate data structure, which can be used to compute matches of affected queries in one pass.
3.1.Annotated query graph
Different from the work proposed in [30] that decomposes queries into covering paths and handles updates by finding affected paths, we provide a novel concept of annotated query graph, namely, AQG, which merges all queries in
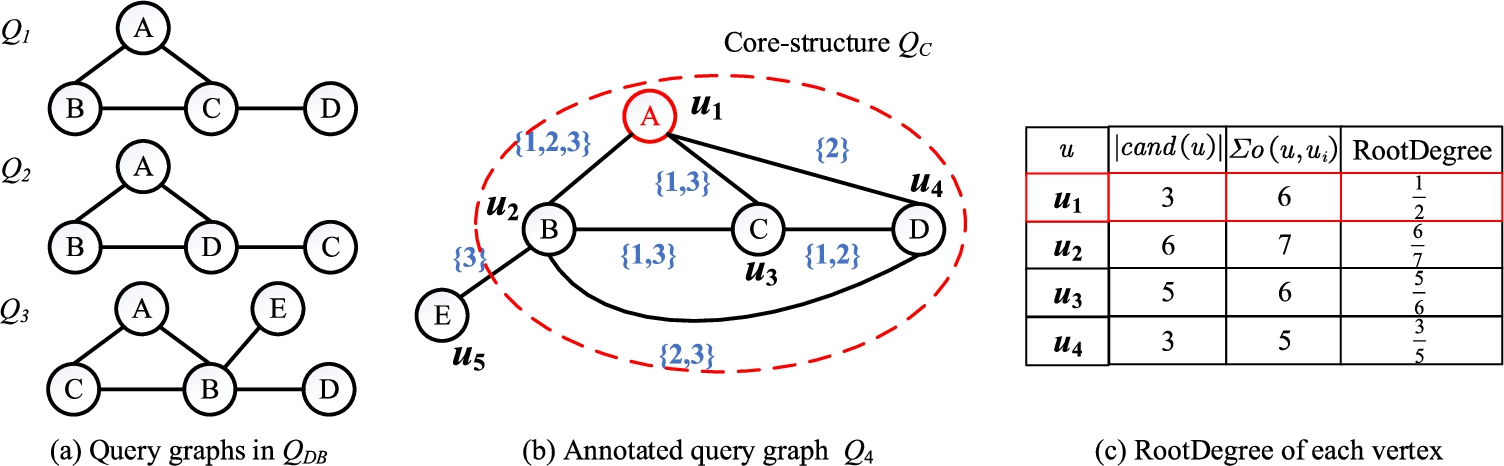
Example 2.
The queries in Fig. 2(a) are overlaped and can be merged into an annotated AQG
Remark.
Note that, there exists a case that the queries in the
Fig. 2.
Annotated query graph.
3.2.Auxiliary data structure
Since continuous multi-query processing is triggered by each update operation on the data graph, it is more useful to maintain some intermediate results for each vertex in the data graph as TurboFlux [15] did rather than in the query graph. To this end, we propose a newly data-centric auxiliary data structure based on the equivalent query tree of AQG.
Definition 3.
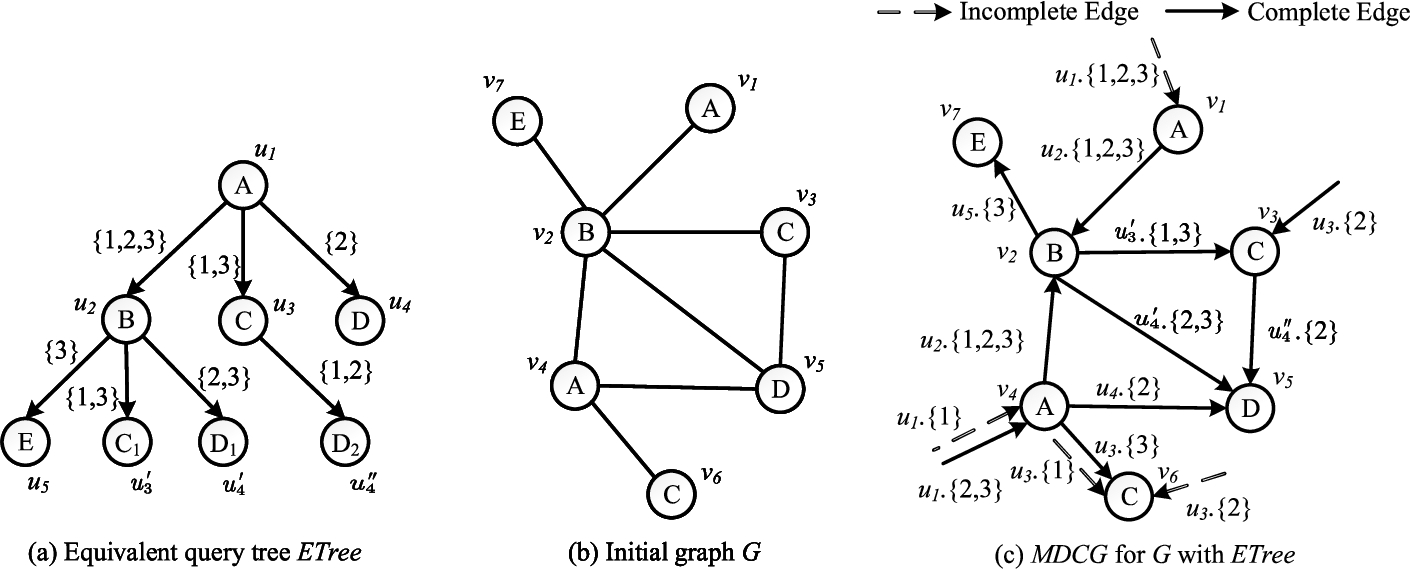
The equivalent query tree of a rooted AQG is defined as the tree ETree such that each edge in AQG corresponds to a tree edge in ETree. (e.g., Fig. 3(a) is the equivalent query tree of AQG
Note that since we will transform all edges of
Example 3.
For each vertex
Fig. 3.
Example of constructing MDCG.
Observation 1.
Let
Example 4.
Consider the edge
Based on
– Null edge: For each query
– Incomplete edge:
– Complete edge:
Note that we do not store Null edges in the MDCG since they are hypothetical edges in order to explain the incremental maintenance strategy (see Section 4). Furthermore, to reduce the storage cost, we use a bitmap for each vertex v in the MDCG where the i-th bit indicates whether v has any incoming Incomplete edges whose label is
4.Continuous multi-query evaluation phase
We rely on an incremental maintain strategy to efficiently maintain MDCG for each edge update operation, and then propose an effective matching order to conduct subgraph pattern matching for affected queries in single pass of enumeration directly.
4.1.Incremental maintenance of intermediate results
We propose an edge state transition model to efficiently identify which update operation can affect the current intermediate results and/or contribute to positive/negative matches for each affected query. The edge state transition model consists of three states and six transition rules, which demonstrates how one state is transited to another.
Fig. 4.
Maintenance strategy.
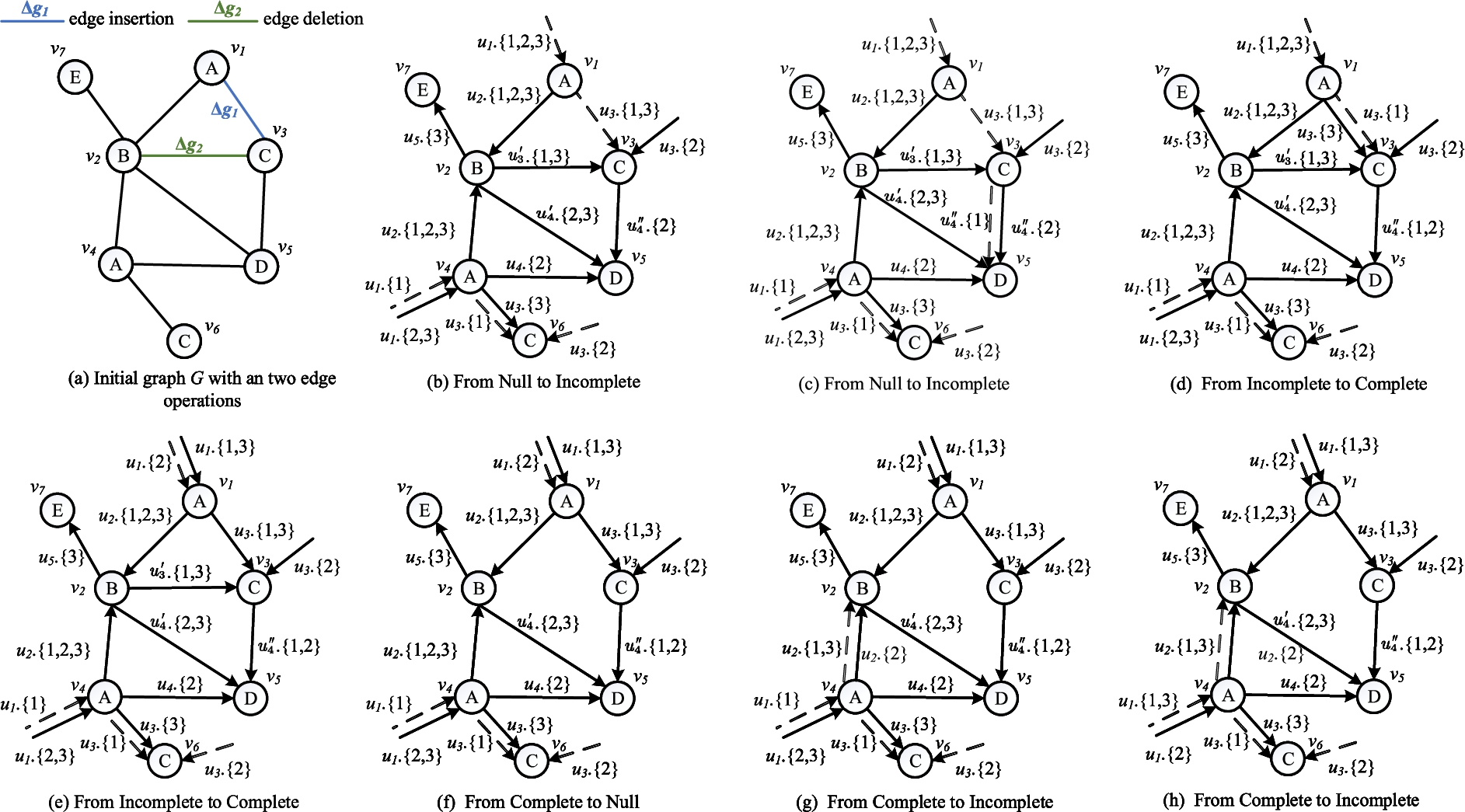
Handing edge insertion When an edge insertion
From Null to Null. (1) Suppose that edge
From Null to Incomplete. (1) Suppose that edge
Example 6.
Figure 4(b)–(c) give the example of edge transition rule from Null to Incomplete. In Fig. 4(a), when the edge insertion operation
From Incomplete to Complete. (1) Suppose that the state of
Example 7.
Figure 4(d)–(e) give the example of edge transition rule from Incomplete to Complete. In Fig. 4(d), since
Handing edge deletion When an edge deletion
From Complete to Null. (1) For each edge
Example 8.
Figure 4(f) gives the example of edge transition rule from Complete to Null. In Fig. 4(a), when the edge deletion operation
From Complete to Incomplete. Suppose that the state of
Example 9.
Figure 4(g)–(h) give the example of edge transition rule from Complete to Incomplete. In Fig. 4(g), since the state of edge
From Incomplete to Null. (1) If v in the MDCG has an incoming Incomplete or Complete edge whose edge label is u, and the state of
4.2.Subgraph search phase
If the state of an edge
In order to calculate the matching order,
Remark.
Intuitively,
In the next stage,
Algorithm 2:
BuildMDCG
Example 10.
As show in Fig. 3(d), the state of edge insertion
5.IncMQO algorithms
In this section, we present detailed algorithms for IncMQO. In order to efficiently handle the continuous multi-query, we first construct the auxiliary data structure MDCG, and then present two major functions insertEval and deleteEval to apply necessary transition rules to efficiently maintain the intermediate results for each update. Finally, we investigate the matching algorithm
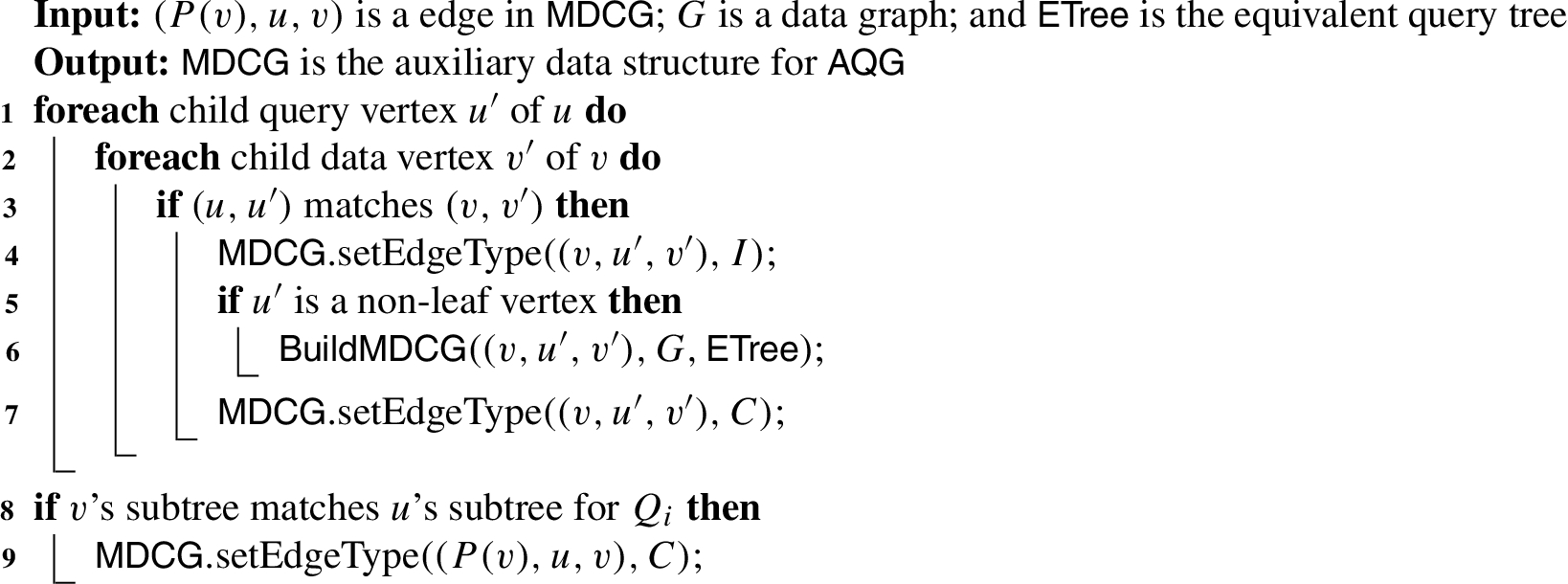
5.1.MDCG construction
In this subsection, we explain BuildMDCG (Line 6 of Algorithm 1) which is designed for every v with an Incomplete incoming edge. It uses a depth-first travel strategy to extend each v in MDCG. First, we check whether there exists an edge
Lemma 1.
The time complexity of BuildMDCG is
Proof.
In the worst case, BuildMDCG is called for every vertex u and every data vertex v. Thus, given u and v the time complexity for Lines 1–2 of Algorithm 2 is
5.2.Edge insertion
insertEval (Algorithm 3) is invoked for each new arrival edge
Algorithm 3:
insertEval
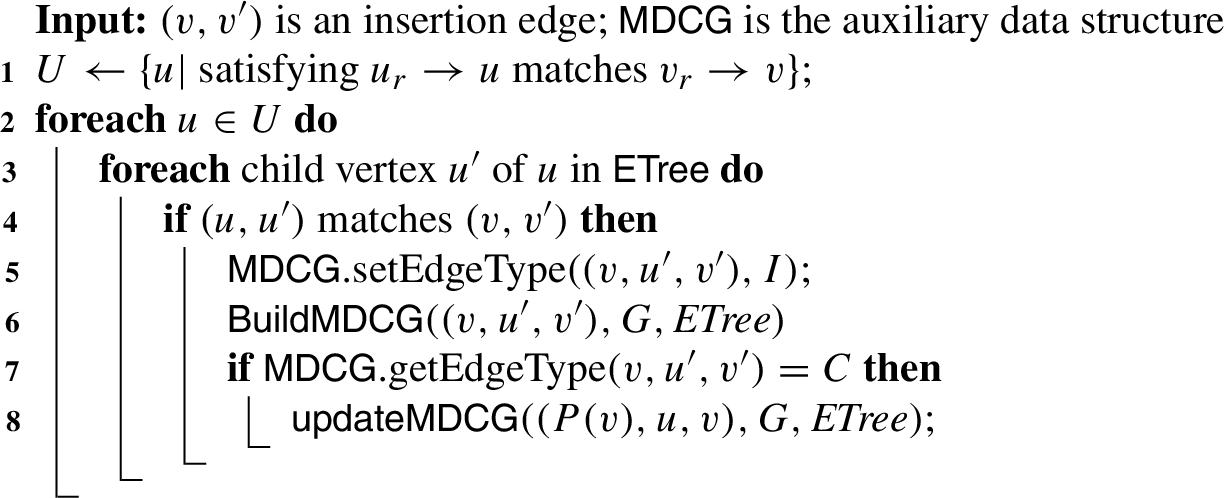
Note that not all the insertion edge
Algorithm 4:
updateMDCG
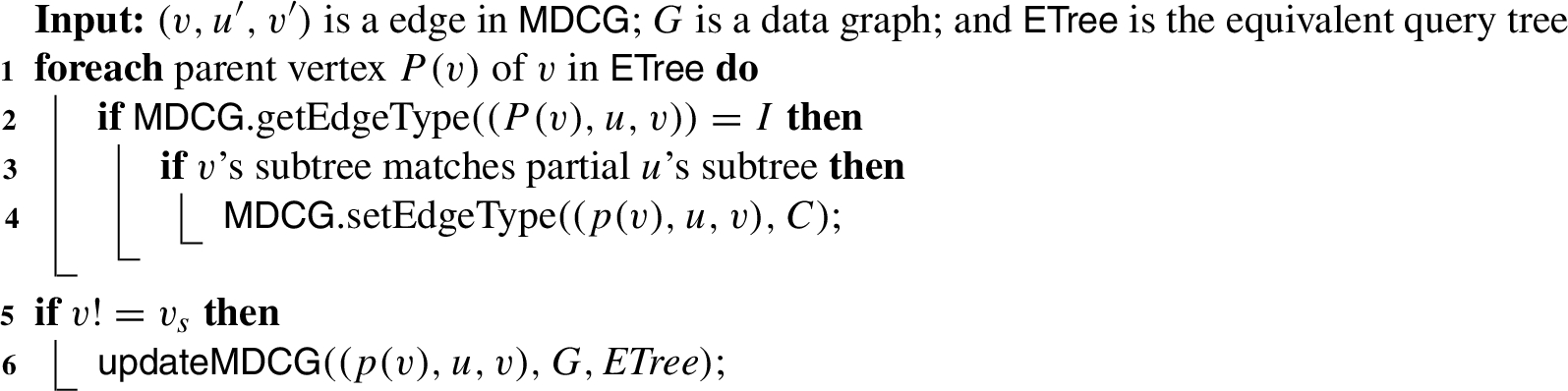
Here, updateMDCG (Algorithm 4) traverses the MDCG upwards and performs the transition rules if necessary. It is only called when v has an incoming edge with Incomplete type (Line 2). Then, when v’s subtree matches u’s subtree for
Remark.
deleteEval algorithms for edge deletion are very similar to those for edge insertion except that they use different transition rules. Thus, we do not describe here.
6.Experiments
In this section, we perform extensive experiments on both real and synthetic datasets to show the performance of IncMQO algorithm for continuous multi-query matching over dynamic graphs. The performance of IncMQO was evaluated using various parameters such as the overlapped rate of query set, average query size, query database size, edge update size, and graph size. The proposed algorithms were implemented using C++, running on a Linux machine with two Core Intel Xeon CPU 2.2 Ghz and 32 GB main memory.
6.1.Datasets and query generation
The SNB dataset. SNB [5] is a synthetic benchmark designed to accurately simulate the evolution of a social network through time. This evolution is modeled using activities that occur inside a social network. Based on the SNB generator, we derived 3 datasets: (1) SNB0.1M with a graph size of
The NYC dataset. NYC22 is a real world set of taxi rides performed in New York City (TAXI) in 2013. TAXI contains more that 160M entries of taxi rides with information about the license, pickup and drop-off location, the trip distance, the date and duration of the trip, and the fare. We utilized the available data to generate a data graph with
The BioGRID dataset. BioGRID [27] is a real world dataset that represents protein to protein interactions. We used BioGRID to generate a stream of updates that result in a graph with
In order to construct the set of query graph patterns
6.2.Comparative evaluation
Our method, denoted as IncMQO, is compared with a number of related works. TRIC is the state-of-the-art continuous multi-query processing method over dynamic graph [30]. It utilizes the common parts of minimum covering paths to amortize the costs of processing and answering them. TurboFlux [15] and GraphFlow [13] are the state-of-the-art continuous subgraph matching methods for single query. Both of them can be utilized for multi-query processing scenarios. That is, we adopt the sequential query processing strategy on them.
We measure and evaluate (1) the elapsed time and the size of intermediate results for IncMQO and its competitors by varying the percentage of overlap between the queries in the query set; (2) the elapsed time and the size of intermediate results for IncMQO and its competitors by varying the average query size and query database size; (3) the elapsed time and the size of intermediate results for IncMQO and its competitors by varying the edge insertion size; (4) the elapsed time and the size of intermediate results for IncMQO and its competitors by varying the edge deletion size; and (5) the scalability of IncMQO.
6.3.Evaluating the efficiency of IncMQO
In this subsection, we evaluated the performance of IncMQO against its competitors from the aspect of processing time and storage cost on three datasets: SNB1M, NYC and BioGRID with a default updates stream
Time efficiency comparison Fig. 5(1) shows the total processing time of IncMQO and its competitors over different datasets. We can see that IncMQO is better than its competitors over all datasets. Notably, IncMQO outperforms TRIC, TurboFlux and GraphFlow by up to 8.43 times, 28.93 times, and 385.21 times, respectively. The reason is that TRIC needs to maintain a large number of indexes to track the matching results; TurboFlux and GraphFlow need to process the multiple queries sequentially, which costs a lot of time overhead. In specific, GraphFlow has the worst performance, since it does not store any intermediate results and use the re-computing method for each update.
Space efficiency comparison Fig. 5(2) shows the size of intermediate results on each dataset. We only evaluate the IncMQO, TRIC, and TurboFlux, since GraphFlow does not maintain any intermediate results. IncMQO outperforms TRIC, and TurboFlux by up to 9.03 times, 29.07 times, respectively. This is because TRIC maintains a large number of materialized views and TurboFlux needs to construct auxiliary data structure for each query in the query set, as a result, leading to worse performance in storage cost.
Fig. 5.
Performance on SNB1M, NYC and BioGRID.
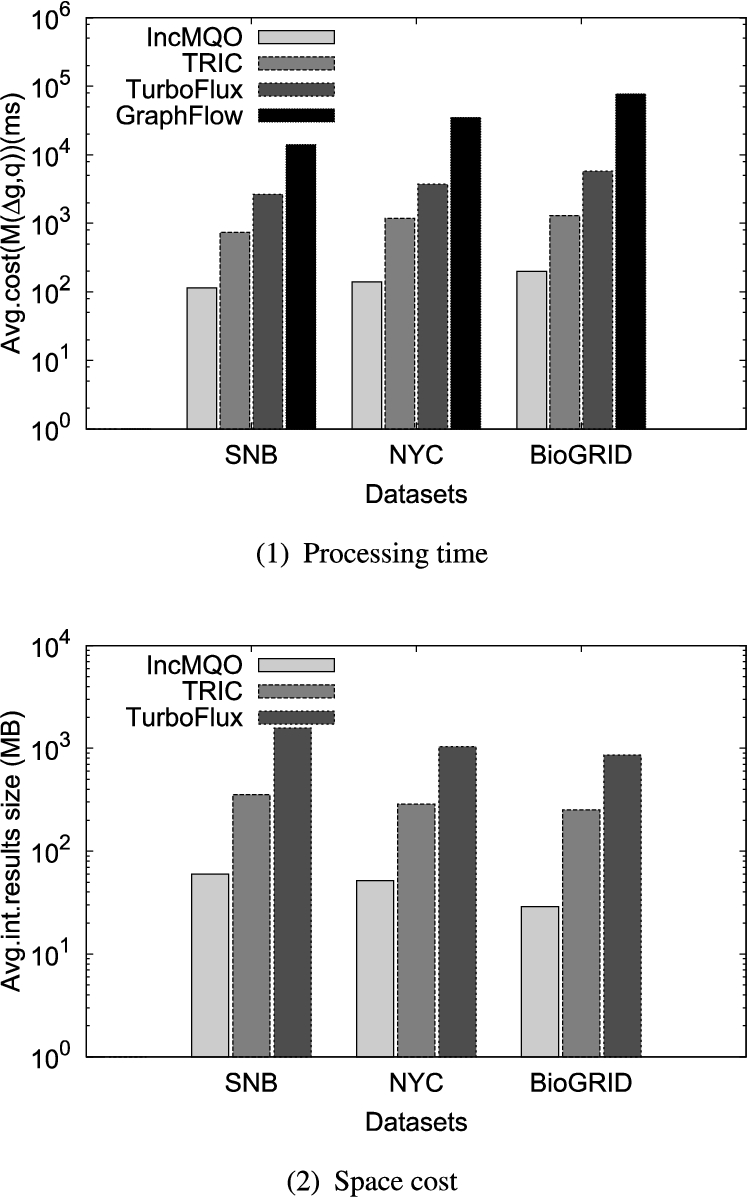
Fig. 6.
Performance of varying the percentage of query overlap.
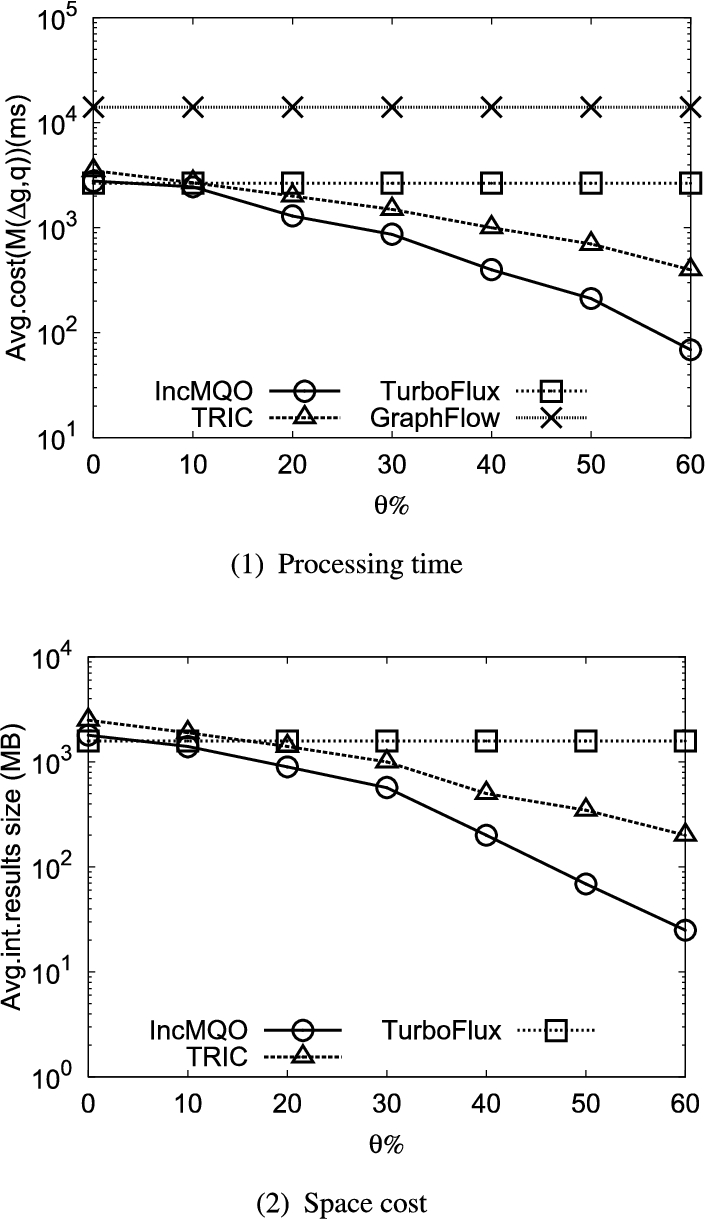
6.4.Varying percentage of query overlap
In Fig. 6(1) we give the results of the time efficiency evaluation when varying the parameter θ, for
Fig. 7.
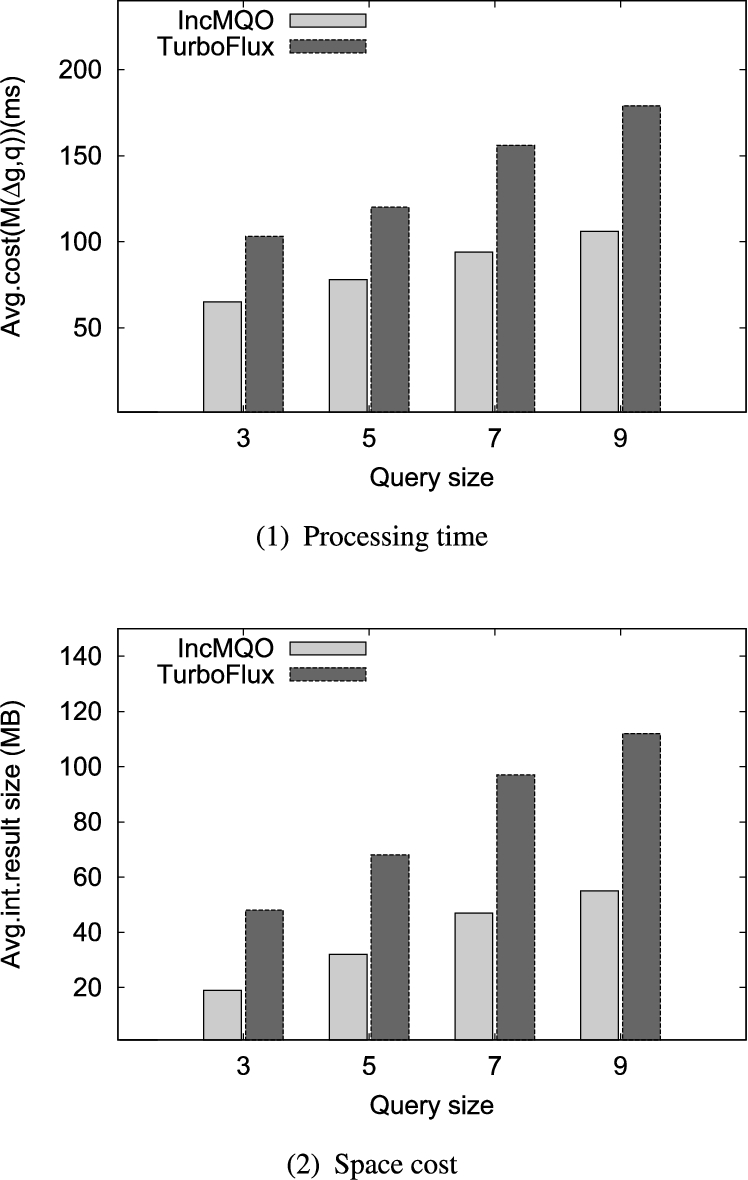
Performance of varying the average query size.
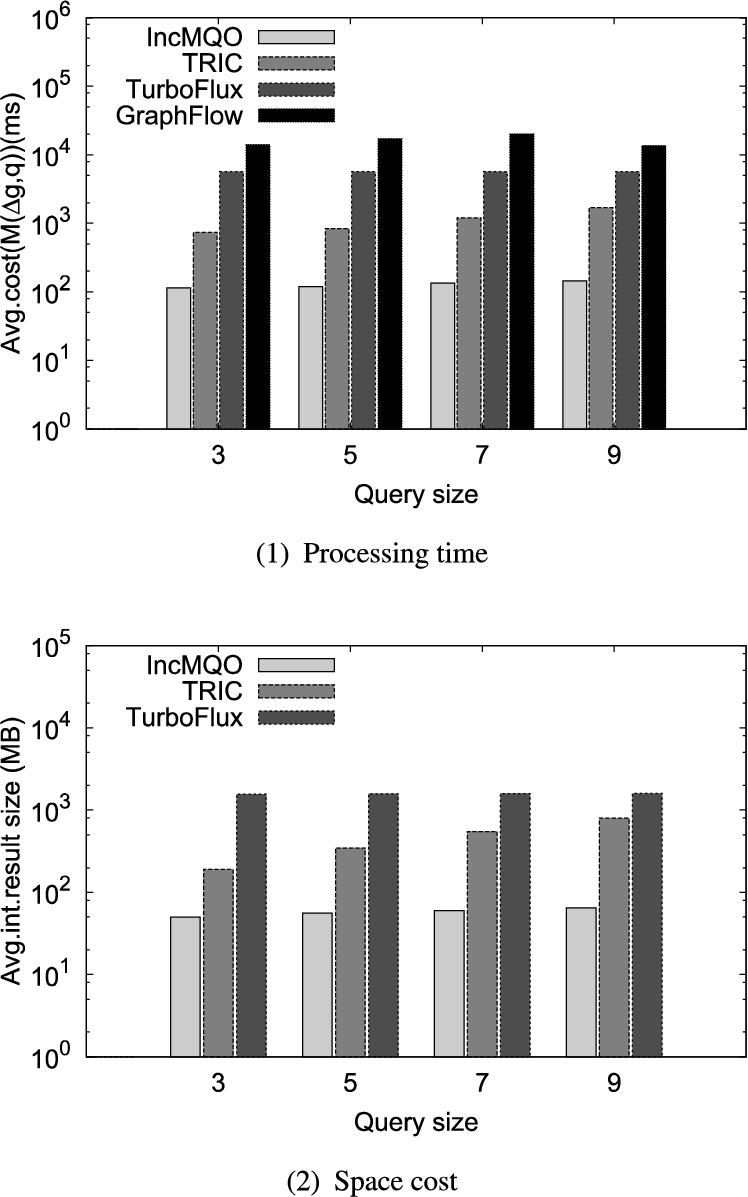
6.5.Varying the average query size
In this subsection, we evaluate the impact of the average query size in
Fig. 8.
Performance of varying query database size.
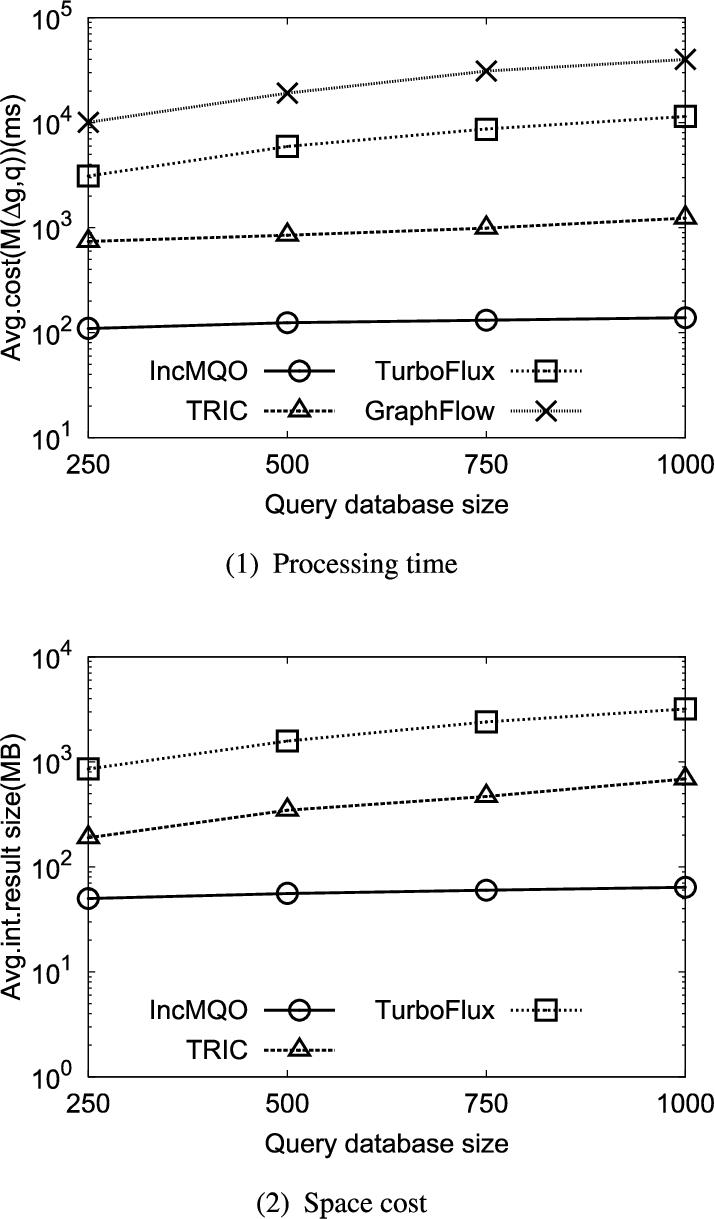
6.6.Varying query database size
In this subsection, we evaluate the impact of the size of query database on the performance of IncMQO and its competitors. Figure 8(1)–(2) show the performance results using SNB for varying the size of the query database
Fig. 9.
Performance of varying the edge insertion size.
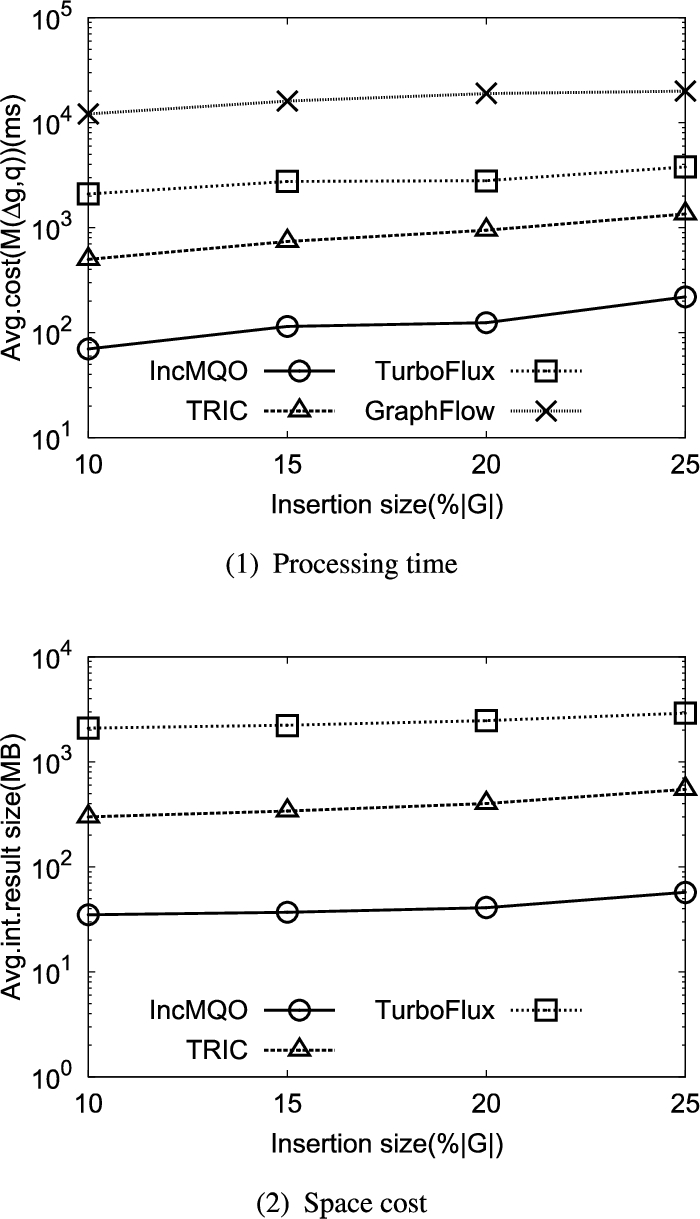
6.7.Varying the edge insertion size
Figure 9(1)–(2) show the performance results using SNB1M for varying edge insertion size. Here, we vary the number of newly-inserted edges from
Fig. 10.
Performance of varying the edge deletion size.
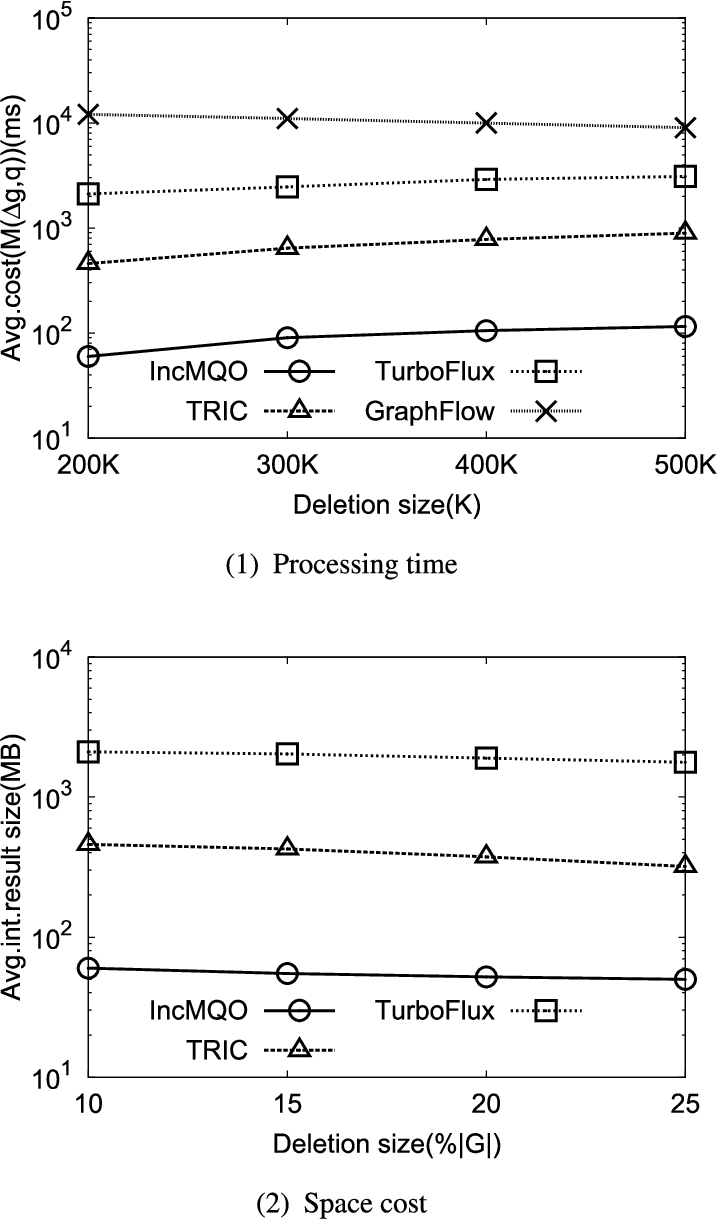
6.8.Varying the edge deletion size
Figure 10(1)–(2) show the performance results using SNB1M for varying edge deletion size. Here, we vary the number of expired edges from
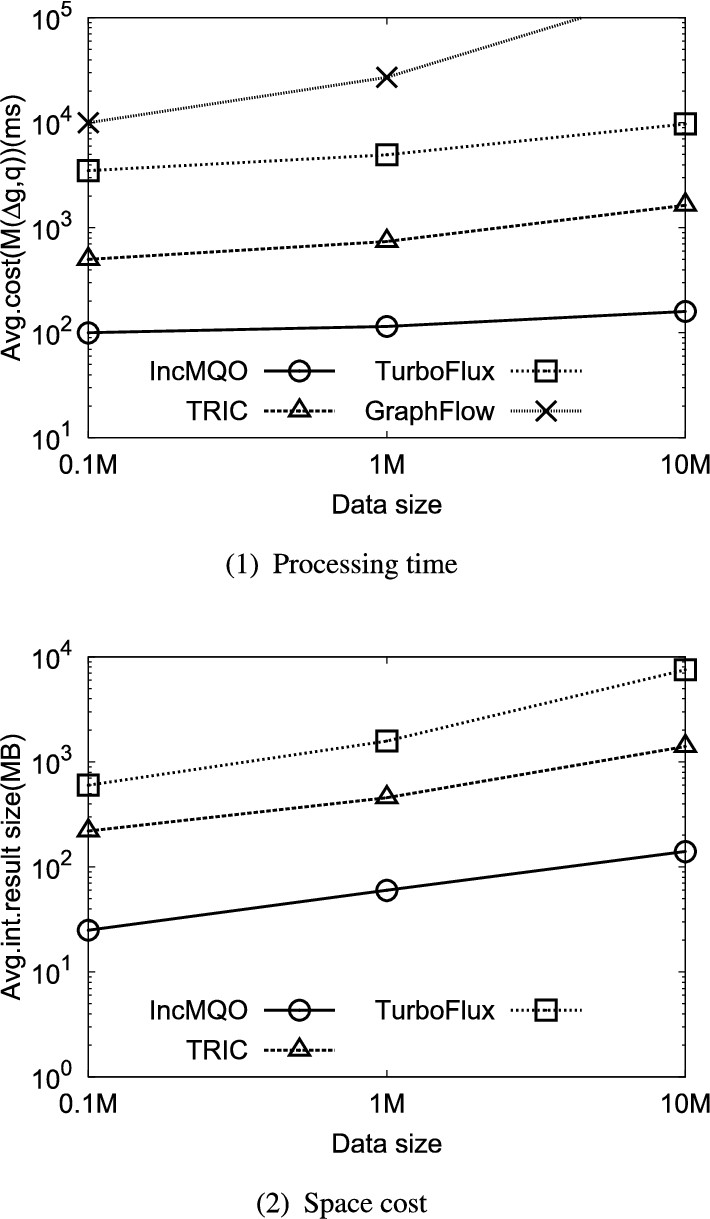
6.9.Varying dataset size
Figure 11(1)–(2) show the performance results using SNB for varying dataset size. Here, we fixed
Fig. 11.
Performance of varying dataset size.
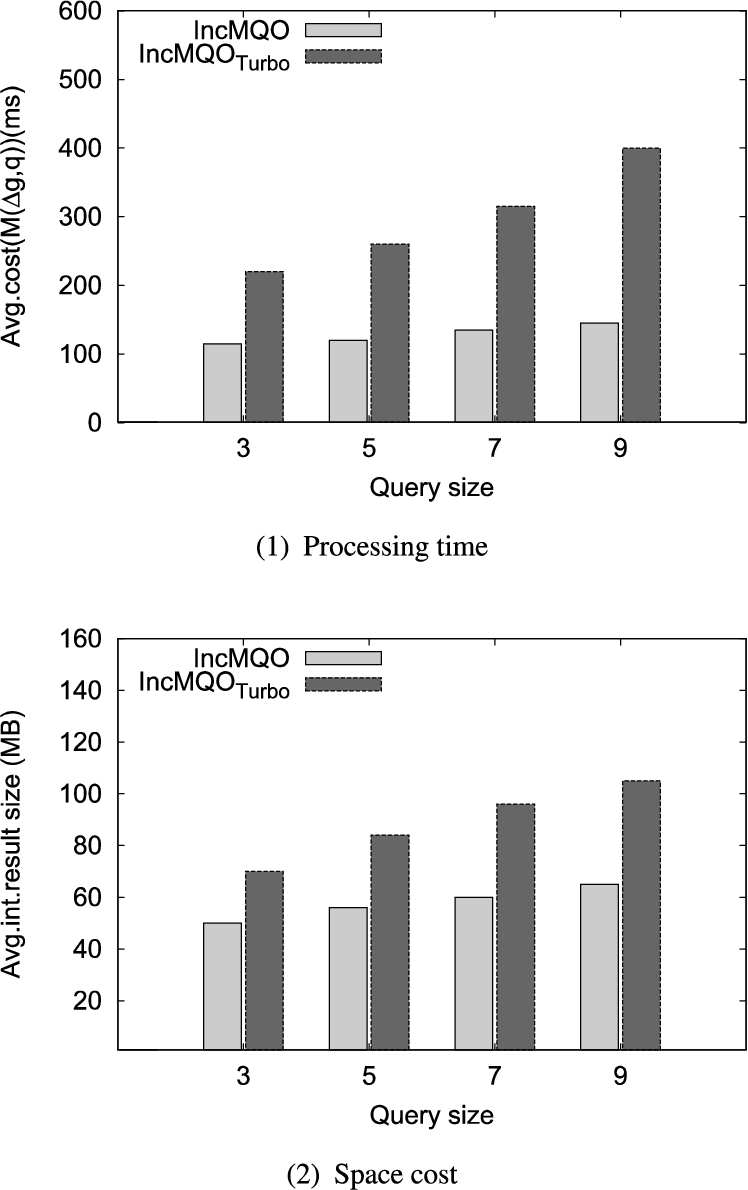
6.10.Comparison of different matching orders
In this set of experiments, we evaluate the performance of different matching orderings on SNB1M dataset. We compare our proposed matching order with that proposed in
Fig. 12.
Comparison of different matching orders.
6.11.Performance evaluation of single query
In this set of experiments, we evaluate the performance of single query to text the efficiency when there is no common components in the query set
Fig. 13.
Performance evaluation of single query.
6.12.Comparison of incremental matching and recomputing algorithm
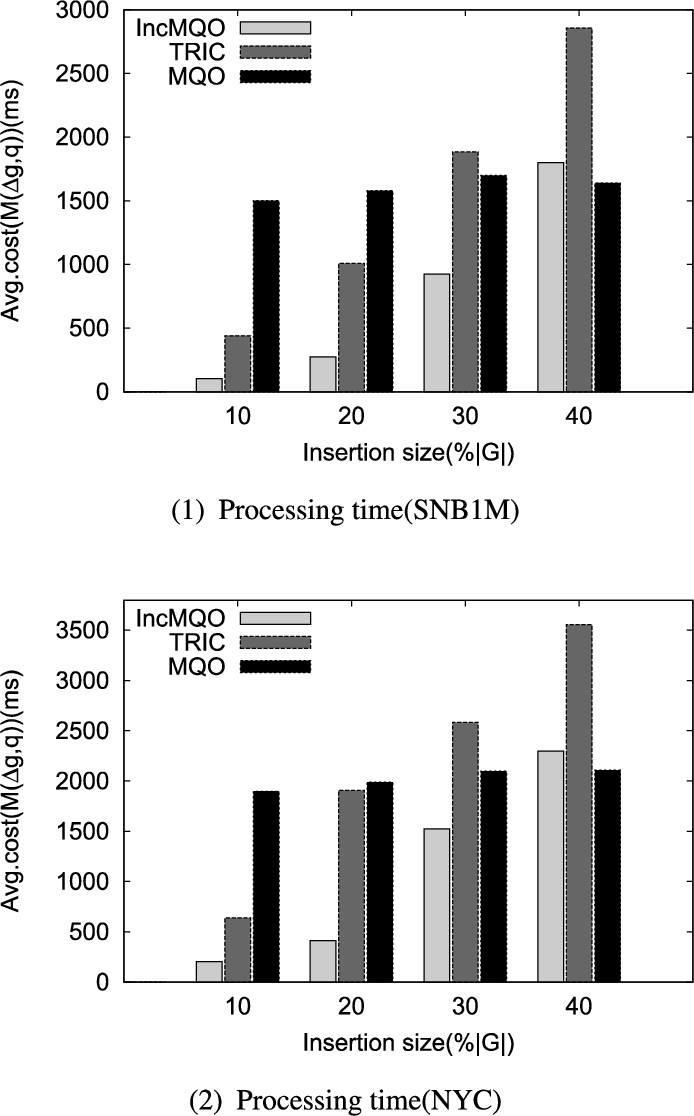
In this subsection, we further compare the incremental algorithm (IncMQO and TRIC) and the recomputing algorithm (MQO [23]) to detect the limitations that the number of updates brings to our algorithm. Recomputing algorithm means that conducts subgraph matching for pattern graph over updated data graph with batch mode. We conduct experiments on the two synthetic and real-life data graphs by varying the newly-inserted edges from
Fig. 14.
Results of the comparison.
7.Related work
We categorize the related work as follows.
Subgraph isomorphism research Subgraph isomorphism research is a fundamental requirement for graph databases and has been widely used in many fields. While this problem is NP-hard, in recent years, many algorithm have been proposed to solve it in a reasonable time for real datasets, such as VF2 [4], GraphQL [11], TurBOiSO [10], QuickSI [26]. Most all these algorithms follow the framework of Ullmann [28], with some pruning strategies, heuristic matching order algorithm and auxiliary neighborhood information to improve the performance of subgraph matching search. Lee et al. [17] compared these subgraph isomorphism algorithms in a common code base and gave in-depth analysis. However, these techniques are designed for static graphs and are not suitable for processing continuous graph queries on evolving graphs.
Multiple query optimization for relational database Multiple query optimization (MQO) has been well studied in relational databases [24,25]. Most work on relational database extend existing cost model based on statistics, and search for a global optimal access plan among all possible access plan combinations for each single query. Meanwhile, some intermediate access plan can be shared to accelerate multi-query evaluation. However, these relational MQO methods cannot be directly used for subgraph homomorphism search of MQO, because we do not assume that statistics or indexes exist on the data graph, and some relational optimization strategies (such as push selection and projection) are not suitable for subgraph homomorphism search. In addition, the methods of identifying common relation subexpression [7] are also difficult or inefficient for graph-based multi-query evaluation since it is inefficient to evaluate graph pattern queries by converting them into relational queries [11].
One-time multiple query evaluation Le et al. [16] studied the problem of evaluating SPARQL one-time multiple queries (SPARQL-MQO) over RDF graphs. Given a batch of graph queries, it clustered the graph queries into disjoint finer groups and then rewrote the patterns into a single query common pattern graph for each group. However, its clustering technique (and selectivity information) becomes degenerate and the construction of query sets ignores the cyclic structures in queries. Subsequently, Ren et al. [23] extended one-time multiple queries for an undirected labeled graph. It organized the useful common subgraphs and the original queries in a data structure called pattern containment map (PCM), and then it further cached the intermediate results based on PCM to balance memory usage and the execution time. Note that, PCM was designed for static graph. When using it in dynamic graph, we need reconstruct PCM for each update operation, which is practically infeasible. In contrast, our proposed MDCG stored intermediate results in the data graph for each data vertex which can reduce maintenance operations associated with data graph updates.
Continuous query process Continuous query process has first been considered in [29] which means continuously monitoring a set of graph streams and reporting the appearances of a set of pattern graphs in a set of graph streams at each timestamp [3,14]. But it offered an approximate answer instead of using subgraph isomorphism verification to find the exact query answers. In the latter study, Fan et al. [6] proposed the concept of incremental subgraph matching to handle continuous query problem. It only executed subgraph matching over the updated part, avoiding recomputing from scratch. In addition, Gillani et al. [9] proposed continuous graph pattern matching over knowledge graph streams and used two different executional models with an automata-based model to guide the searching process. Kim et al. [15] proposed a novel data-centric presentation to process continuous subgraph matching. However, all of the above algorithms evaluate each query separately and cannot be directly used for multi-query problem.
Continuous multiple query evaluation In addition, there are some researches on the topic of continuous multiple queries evaluation. Pugliese et al. [19] studied maintaining multiple subgraph query views under single-edge insertion workloads. It took advantage of common substructures and used an optimal merge strategy. However, it only focused on insertion. But in the real world, deletions also occur. Kankanamge et al. [12] studied the problem of optimizing and evaluating multiple subgraph queries continuously in a changing graph. It decomposed all the queries into multiple delta queries, which were then evaluated one query vertex at a time, without requiring any auxiliary data structures. Mhedhbi et al. [18] optimized both one-time and continuous subgraph queries using worst-case optimal joins. Since the methods in literatures [12] and [18] did not store any intermediate results, they needed to evaluate subgraph matching for each update, even if the update did not generate any positive/negative match. In recently, Zervakis et al. [30] handled the continuous multi-query problem over graph streams via decomposing the query into covering paths, and then it constructed a tree-based data structure to indexing and clustering continuous graph queries. However, this data structure is not concise enough, leading to many expensive join operations. Compared to covering paths, our proposed MDCG uses the data-centric representation of intermediate results, which is more concise. As a result, MDCG needs less memory consumption and has smaller maintenance costs for each update.
8.Conclusion and further work
In this paper, we proposed an efficient continuous multi-query processing engine, namely, IncMQO, in dynamic graphs. We showed that IncMQO can resolve the problems of existing methods and process continuous multiple subgraph matching for each update operation efficiently. We first developed a novel concept of annotated query graph that merges multi-query into one. Then we constructed a data-centric auxiliary data structure based on the equivalent query tree of the annotated query graph to represent partial solutions in a concise form. For each update, we proposed an edge transition strategy to maintain the intermediate results incrementally and detect the affected queries quickly. What’s more, we proposed an efficient matching order to calculate the positive or negative matching results for each affected query in one pass. Finally, comprehensive experiments performed on real and benchmark datasets demonstrate that our proposed algorithm outperforms alternatives.
A couple of issues need further study. We only simply consider the scenario that all the queries have been given at the start. However, the queries set will actually be updated due to users’ demands. To this end, we are going to consider this scenario in the future work and design an efficient algorithm to deal with the updates of queries set in multiple queries processing over dynamic graph.
Acknowledgement
This work is partially supported by National key research and development program under Grant Nos. 2018YFB1800203, Tianjin Science and Technology Foundation under Grant No. 18ZXJMTG00290, National Natural Science Foundation of China under Grant No. 61872446, and National Natural Science Foundation of Hunan Province under grant No. 2019JJ20024.
References
[1] | F. Bi, L. Chang, X. Lin, L. Qin and W. Zhang, Efficient subgraph matching by postponing Cartesian products, in: Proceedings of the 2016 International Conference on Management of Data, ACM, San Francisco, CA, (2016) . doi:10.1145/2882903.2915236. |
[2] | Y. Chen, X. Zhao, X. Lin, Y. Wang, D. Guo, B. Ren, G. Cheng and D. Guo, Efficient mining of frequent patterns on uncertain graphs, IEEE Trans. Knowl. Data Eng. 31: (2) ((2019) ), 287–300. doi:10.1109/TKDE.2018.2830336. |
[3] | S. Choudhury, L.B. Holder, G. Chin, K. Agarwal and J. Feo, A selectivity based approach to continuous pattern detection in streaming graphs, in: Proceedings of the 18th International Conference on Extending Database Technology, OpenProceedings.org, Brussels, Belgium, (2015) , pp. 157–168. doi:10.5441/002/edbt.2015.15. |
[4] | L.P. Cordella, P. Foggia, C. Sansone and M. Vento, A (sub)graph isomorphism algorithm for matching large graphs, IEEE Trans. Pattern Anal. Mach. Intell. 26: (10) ((2004) ), 1367–1372. doi:10.1109/TPAMI.2004.75. |
[5] | O. Erling, A. Averbuch, J. Larriba-Pey, H. Chafi, A. Gubichev, A. Prat-Pérez, M. Pham and P.A. Boncz, The LDBC social network benchmark: Interactive workload, in: Proceedings of the 2015 International Conference on Management of Data, ACM, Melbourne, Victoria, Australia, (2015) , pp. 619–630. doi:10.1145/2723372.2742786. |
[6] | W. Fan, J. Li, J. Luo, Z. Tan, X. Wang and Y. Wu, Incremental graph pattern matching, in: Proceedings of the 2011 International Conference on Management of Data, ACM, Athens, Greece, (2011) , pp. 925–936. doi:10.1145/1989323.1989420. |
[7] | S.J. Finkelstein, Common subexpression analysis in database applications, in: Proceedings of the 1982 International Conference on Management of Data, ACM Press, Orlando, Florida, (1982) , pp. 235–245. doi:10.1145/582353.582400. |
[8] | J. Gao, C. Zhou and J.X. Yu, Toward continuous pattern detection over evolving large graph with snapshot isolation, VLDB J. 25: (2) ((2016) ), 269–290. doi:10.1007/s00778-015-0416-z. |
[9] | S. Gillani, G. Picard and F. Laforest, Continuous graph pattern matching over knowledge graph streams, in: Proceedings of the 10th International Conference on Distributed and Event-Based Systems, ACM, Irvine, CA, (2016) , pp. 214–225. doi:10.1145/2933267.2933306. |
[10] | W. Han, J. Lee and J. Lee, Turboiso: Towards ultrafast and robust subgraph isomorphism search in large graph databases, in: Proceedings of the 2013 International Conference on Management of Data, ACM, New York, NY, (2013) , pp. 337–348. doi:10.1145/2463676.2465300. |
[11] | H. He and A.K. Singh, Query language and access methods for graph databases, in: Managing and Mining Graph Data, Advances in Database Systems, Vol. 40: , Springer, (2010) , pp. 125–160. doi:10.1007/978-1-4419-6045-0_4. |
[12] | C. Kankanamge, Multiple continuous subgraph query optimization using delta subgraph queries, Thesis, 2018. |
[13] | C. Kankanamge, S. Sahu, A. Mhedbhi, J. Chen and S. Salihoglu, Graphflow: An active graph database, in: Proceedings of the 2017 International Conference on Management of Data, ACM, Chicago, IL, (2017) , pp. 1695–1698. doi:10.1145/3035918.3056445. |
[14] | U. Khurana and A. Deshpande, Efficient snapshot retrieval over historical graph data, in: Proceedings of the 29th International Conference on Data Engineering, IEEE Computer Society, Brisbane, Australia, (2013) , pp. 997–1008. doi:10.1109/ICDE.2013.6544892. |
[15] | K. Kim, I. Seo, W. Han, J. Lee, S. Hong, H. Chafi, H. Shin and G. Jeong, TurboFlux: A fast continuous subgraph matching system for streaming graph data, in: Proceedings of the 2018 International Conference on Management of Data, ACM, Houston, TX, (2018) , pp. 411–426. doi:10.1145/3183713.3196917. |
[16] | W. Le, A. Kementsietsidis, S. Duan and F. Li, Scalable multi-query optimization for SPARQL, in: Proceedings of the 28th International Conference on Data Engineering, IEEE Computer Society, Washington, DC, (2012) , pp. 666–677. doi:10.1109/ICDE.2012.37. |
[17] | J. Lee, W. Han, R. Kasperovics and J. Lee, An in-depth comparison of subgraph isomorphism algorithms in graph databases, Proc. VLDB Endow. 6: (2) ((2012) ), 133–144. doi:10.14778/2535568.2448946. |
[18] | A. Mhedhbi, C. Kankanamge and S. Salihoglu, Optimizing one-time and continuous subgraph queries using worst-case optimal joins, ACM Trans. Database Syst. 46: (2) ((2021) ), 6:1–6:45. doi:10.1145/3446980. |
[19] | A. Pugliese, M. Bröcheler, V.S. Subrahmanian and M. Ovelgönne, Efficient multiview maintenance under insertion in huge social networks, ACM Trans. Web 8: (2) ((2014) ), 10:1–10:32. doi:10.1145/2541290. |
[20] | Y. Qin, D. Guo, X. Lin and G. Cheng, Design and optimization of VLC enabled data center network, Tsinghua Science and Technology 25: (1) ((2020) ), 82–92. doi:10.26599/TST.2018.9010105. |
[21] | Y. Qin, D. Guo, X. Lin, G. Tang and B. Ren, TIO: A VLC-enabled hybrid data center network architecture, Tsinghua Science and Technology ((2019) ). doi:10.26599/TST.2018.9010093. |
[22] | B. Ren, G. Cheng and D. Guo, Minimum-cost forest for uncertain multicast with delay constraints, Tsinghua Science and Technology 24: (2) ((2019) ), 13. doi:10.26599/TST.2018.9010072. |
[23] | X. Ren and J. Wang, Multi-query optimization for subgraph isomorphism search, Proc. VLDB Endow. 10: (3) ((2016) ), 121–132. doi:10.14778/3021924.3021929. |
[24] | T.K. Sellis, Multiple-query optimization, ACM Trans. Database Syst. 13: (1) ((1988) ), 23–52. doi:10.1145/42201.42203. |
[25] | T.K. Sellis and S. Ghosh, On the multiple-query optimization problem, IEEE Trans. Knowl. Data Eng. 2: (2) ((1990) ), 262–266. doi:10.1109/69.54724. |
[26] | H. Shang, Y. Zhang, X. Lin and J.X. Yu, Taming verification hardness: An efficient algorithm for testing subgraph isomorphism, Proc. VLDB Endow. 1: (1) ((2008) ), 364–375. doi:10.14778/1453856.1453899. |
[27] | C. Stark, B. Breitkreutz, T. Reguly, L. Boucher, A. Breitkreutz and M. Tyers, BioGRID: A general repository for interaction datasets, Nucleic Acids Res. 34: (Database–Issue) ((2006) ), 535–539. doi:10.1093/nar/gkj109. |
[28] | J.R. Ullmann, An algorithm for subgraph isomorphism, J. ACM 23: (1) ((1976) ), 31–42. doi:10.1145/321921.321925. |
[29] | C. Wang and L. Chen, Continuous subgraph pattern search over graph streams, in: Proceedings of the 25th International Conference on Data Engineering, IEEE Computer Society, Shanghai, China, (2009) , pp. 393–404. doi:10.1109/ICDE.2009.132. |
[30] | L. Zervakis, V. Setty, C. Tryfonopoulos and K. Hose, Efficient continuous multi-query processing over graph streams, in: Proceedings of the 23rd International Conference on Extending Database Technology, OpenProceedings.org, Copenhagen, Denmark, (2020) , pp. 13–24. doi:10.5441/002/edbt.2020.03. |


