
Loving robots changing love: Towards a practical deficiency-love
Abstract
Robots are today made not only to assist us in menial tasks and routine labour but also provide companionship and love. This has generated much academic and public interest, and people have asked whether robots can love, whether human–robot relationships are possible, and whether humans can develop loving affection for robots. These are all important questions, but I approach the issues from another perspective: can robots made for love change our very understanding of love? By treating love as a cultural and malleable phenomenon, I explore the possibility of it being changed a) to accommodate robots, and b) as a consequence of how robots love us. The first regards the quest to understand what love is and our current tendency to understand phenomena in light of the computer or computational metaphor of human beings. The second involves an examination of how robots are produced to love, and what this form of love might lead to in the wild. Rather than asking if robots can live up to human ideals, I ask if humans will live down – or it might be up – to robot ideals. Using Abraham Maslow’s distinction between being love and deficiency love as an example, I argue that love robots might take us to a place where deficiency love and a growing expectancy of one-sided worship changes the content of love as a cultural phenomenon.
1.Introduction
Artificial beings occupy a special place in human imagination, and both ancient and modern lore attest to our fascination with the nature of our relationships with what we create. Prometheus provided a magical and mythical ancient account, Frankenstein provides a pseudoscientific modern promethean story, and androids like Data in Star Trek portray possible future versions of human made artificial life (Raggio, 1958; Shelley, 2012; Wilcox, 1993). Today, robots are far more than hypothetical flights of the imagination, and our very real artificial beings today assist us with more than just menial tasks and routine labour, as their creators aspire to provide companionship and love robots.
David Levy (2009) provided a ground-breaking account of Love and Sex with Robots, and in the years following, robotics and artificial intelligence (AI) has continued to evolve, and much academic interest has been paid to various aspects of human–robot relations. Some have asked whether robots can love, whether human–robot relationships are possible, what the nature of human–robot relationships are, and whether humans can develop loving affections for robots (de Graaf, 2016; Levy, 2009; Nyholm, 2020; Viik, 2020). Relatedly, many have examined whether robots can be sexual partners, friends, colleagues, and social partners in general (Danaher, 2019; Danaher and McArthur, 2017; Devlin, 2018; Levy, 2009; Marti, 2010; Nyholm and Smids, 2020; Sætra, 2020b; Wilks, 2010).
These are all important questions, but I approach the issues from another perspective: can robots made for love change our very understanding of love? The article is thus a contribution to the development of the research agenda on the long term social and cultural implications of robots designed as romantic partners, with a particular emphasis on how love as a concept is affected (Borenstein and Arkin, 2019; Wilks, 2010).
Sullins (2012) provided some early forays into a more comprehensive understanding of love. I support his call for a more interdisciplinary approach to love and adopt a cultural psychological perspective of love as a cultural concept, which implies that the relationship between a person (as culture bearer) and their environment (social-cultural systems) is seen as dynamic, where culture is analysed as something occurring between the two (Valsiner, 2014). Culture is dynamic; it has no agency, and it does not cause anything – rather it is “human beings … who make culture, maintain it, and who destroy it” (Valsiner, 2014, p. 35). Culture is a product of the mind, consisting of meanings, tools, symbols, and also norms, values, and attitudes (Triandis et al., 2001; Valsiner, 2014). Part of what I examine is how we are currently changing the cultural concept of love through our attempts to understand love and make robots capable of loving.
Culture can also be understood as a mechanism promoting cooperation and group success. It arises from the need to adapt to changing social conditions more quickly than what is possible through biological evolution (Churchland, 2011; Tomasello, 2009). With this perspective I acknowledge the biological and instinctual foundations of love, while arguing that human culture mediates and shapes these foundations in important ways and is not entirely disconnected from biology (Greenfield, 1999). Cultural psychology enables us both to examine the nature of love as a concept and see how culture shapes behaviour (Valsiner, 2014).
By treating love as a cultural and malleable phenomenon, I explore two possible mechanisms of cultural change related to love robots. The first regards the quest to understand what love is and our current tendency to understand phenomena in light of the computer or computational metaphor of human beings and human existence (Hayles, 2006; Ibáñez and Cosmelli, 2008). By examining claims and choices of roboticists and the academic discourse on love as related to robots, I position this discourse in relation to various established conceptualisations of love. As love is a cultural concept, the discursive practices related to understanding love are argued to have potential effects on how love itself is understood. Humans collaboratively establish culture, and an important mechanism involved in establishing, maintaining and destroying social constructs is discourse (Valsiner, 2014). As Hayles (2006) notes, the computational metaphor leads us to disregard important aspects of cultural dynamics, particularly those related the interaction between culture, metaphor and technology.
The second involves an examination of how robots are produced to love, and what this form of love might lead to in the wild. Computers can undoubtedly provide some form of love, and this might influence human expectations and preferences for loving companions. Some argue that robots will be effective enough to make us prefer them to human partners because they outperform humans in love, and others emphasise the convenience and efficiency they provide, despite robots being far from perfect (Danaher, 2019; Levy, 2009; Nyholm and Frank, 2019; Sætra, 2019b, 2020a; Turkle, 2017).
These two mechanisms may together contribute to changing love as a concept, and the concluding section consists of an examination of what type of love it changes into. Again drawing on established typologies of love, I emphasise Abraham Maslow’s (1973) distinction between being-love and deficiency-love and argue that robots may be leading us towards an impoverished and arguably pathological form of love. Rather than asking if robots can live up to human ideals, I ask if humans will live down to robot ideals.
By establishing this potential trajectory, I also highlight likely societal implications of such a change, as these become crucial subjects for further research on love and robots. In this context robots are conceived of as culturally disruptive, potentially leading to cultural change and moral revolutions (Danaher, 2020a; Sætra, 2021).
Firstly, love as a concept is examined and the theoretical approach is further developed, as a typology of love based on non-robotic and robotic academic literature is established. Secondly, love robots are defined and described, and the two mechanisms of cultural change are introduced and discussed. Finally, I discuss the likely trajectory for love as a concept and some suggestions for further research based on the potential implications of a changed conceptualisation of love.
2.A thing called love
Few concepts are as central to human existence as love. It permeates individuals’ lives and histories; the great historical novels and less than great but yet highly popular novels; fairy tales; movies; advertising; toys; and just about any other aspect related to human affairs. Love is intimately connected to life itself, and in our modern western societies, one of the greatest imaginable tragedies is at times portrayed to be a life without love.
However, when pondering what love is, as both Shakespeare and Haddaway have done, most would struggle to provide a straight forward and useful definition of the concept. However, to discover what a love robot is, and how love might be susceptible to change, we first need a proper understanding of the concept. First of all, there are many types of love. People might love the city they live in, or their friends and family, and they might even love a good night out (Pettman, 2009; Phillips, 2007; Viik, 2020). People might also say that they “love” their new iPhones, cars, vacuum cleaners, or their new TV (Levy, 2009). This broad notion of love is not what I refer to here. Love, in what follows, relates to the kind of love that is historically associated with the love between human beings who decide to live together in partnership.
Love might be characterised as a human need, and Maslow (1987) considers it a higher need in the sense that it will most likely not be experienced as a pressing concern for a person dominated by basic physiological needs or safety needs. Sex is considered a basic physiological need, while love is grouped with the need for belonging and connection. I follow Maslow in separating the two, and thus consider it beneficial to consider sex with robots and love with robots as two distinct, but clearly related, phenomena.
Belonging to a group or flock and having a loving partner are, however, two different phenomena. To make sense of what “robot love” really entails, a basic choice must be made regarding our basic approach to love as a concept. One option is to attempt to uncover a universal concept called love and then examine to what extent robots are able to love, be loved, and take part in loving relationships. With this approach, love is treated as something akin to a platonic idea – something timeless and enduring that is applicable to all historical and cultural contexts of human existence. Love is thus defined as philosophical universal – a phenomenon accessible by philosophical examination and rationality.
This form of rationalism or philosophical idealism is exemplified by de Graaf (2016), with her use of Aristotle and Eudamonia, and Danaher (2019), with his examination of robot friendship through the ideal of Aristotle’s virtue friendship. Nyholm (2020) provides an example of this approach as it relates to human–robot friendship. He asks whether a robot can be a good friend, and the idea of friendship provided by Cicero is used as a key component of the analysis, providing a sort of platonic idea of a relationship type discoverable in the age of the Roman empire, and equally applicable to our age and various communities and cultures.11 Sullins (2012) uses Cicero in an attempt to uncover the nature of love.
The problem with this approach is that love is assumed to be a universal concept, and thus it will inevitably also be construed as a static and enduring concept. While different people in different contexts may be more or less successful in uncovering, understanding, and achieving this ideal, there is this assumption of one ideal, applicable to all.
2.1.Love as a cultural phenomenon
My approach to love is radically different, as love is understood as a social construct – a cultural phenomenon amenable to change and thus highly dependent on context (Illouz, 1997). While acknowledging that there are, for example, biological, chemical, and evolutionary accounts of what love is and its material basis, love is a social construct and cultural phenomenon.
The material foundation of the human desire for love leads many to consider love a universal phenomenon. Philosophers have long argued that certain basic needs, such as lust, are needs we share with animals (Hobbes, 1946). However, love is not the same as lust, and Maslow (1987) argues that the higher the needs, the more exclusively human it is. Love, he argues, is not a universal phenomenon exhibited in animal communities, apart, perhaps from in the communities of higher apes (Maslow, 1987).
Even if love is considered to be a universal human phenomenon, a slight effort to examine how it is manifested in real life reveals that it varies considerably between historical and cultural contexts (Coontz, 2006; Karandashev, 2015, 2016). Love does not occur in a vacuum, and our cultural and social backgrounds heavily influence how we perceive love and what we expect of love (Viik, 2020). Hobbes and Maslow, for example, clearly referred to two different things when they described love and marriage (Sætra, 2020c). In Hobbes’s age, love, marriage, and conjugal affection largely related to a social arrangement important for satisfying basic needs such as the physiological and safety needs. Maslow, however, wrote in a period in which marriage was clearly linked to achieving higher needs (Finkel et al., 2014).
In cultural psychology, love is considered one of the “central meaning complexes of our lives”, and Valsiner (2014, pp. 58, 260) refers to it as “hyper-generalized signs of field-like kind”, among other generic notions such as self, justice and patriotism. While generalisation typically allow us to use signs to refer to some particular and distant phenomenon, a hyper-generalised sign refers to the results of sign use and how this “positions him/herself by way of relating a present experience to that of the past – and the past is brought into the present” (Valsiner, 2014, pp. 56–58). These “field type” meaning complexes can also be described as social constructs. Love in this sense has no objective ontological existence, but it has a clear functional existence as it regulates our lives and influences our behaviour (Illouz, 1997; Valsiner, 2014).
Human beings create culture, and culture is a constitutive element in the creation of ourselves (Valsiner, 2014). This notion of the dynamic nature of the relationship between individuals and culture is also reflected in Hayles’s (2010, p. 216) idea that ‘What we make and what (we think) we are co-evolve together.’ She refers to the interaction between cultural presuppositions and technology, means and metaphors, and this fundamentally dynamic relationship is the basis of one of the mechanisms of change in cultural concepts developed below (Hayles, 2006).
In plainer words, love is a social construct that we jointly develop through our interactions with each other. While we may think that we have individual conceptions of what love is, it is inextricably linked to our history and the culture we know and have been brought up in. Furthermore, this clearly distinguishes love from the universal platonic ideas discoverable by human rationality and not subject to human influence. Love is established, maintained, and changed by human beings and our interactions, and it is thus a fundamentally malleable and dynamic concept. For each generation, Pettman (2009) argues, we both reconfigure and maintain love as a cultural concept.
Love is amenable to change, and cultural psychology is used as the basis for understanding such change. Furthermore, as love is here considered to be a social construct, something established, maintained and changed by human interaction, it must necessarily be analysed by examining human experiences phenomenologically. What a robot ontologically is matters not, as it is humans’ experience of relations with them that matters. Technological artefacts constitute both objects of experience and modify how we experience things (Viik, 2020). From a phenomenological perspective, many questions regarding the ontological nature of robots, and the (lack of) mind in robots, etc., are set aside, while the human experience of love, combined with the idea that love is a cultural concept, is examined.
This approach to love takes us quite far away from the behaviourist focus on human actions. Radical behaviourism involves an insistence “that the meanings people attach to their actions and to other objects play no part in determining what they do” (Sayer, 1992). This position is just about the anti-thesis to the cultural psychological approach in which humans as “compulsive meaning-makers” both make culture and are affected by it (Valsiner, 2014, p. 1). The difference between behaviourism and alternative approaches will be developed further in a later section, as I argue that approaches like the functionalism of Levy (2009) and ethical behaviourism of Danaher (2020b) can entail a change in our understanding of love itself. This is not to argue that a behaviourist perspective is wrong. I merely state that our ontological and moral assumptions, when made part of the discourse on the nature of robots and love, will influence how people conceptualise and understand love as a concept.
Furthermore, seeing love as a cultural concept entails a rejection of the view that love is fully explained by, for example, referring to chemical processes, the release of oxytocin, etc. (Earp and Savulescu, 2018). What is at times referred to as neuroreductionism or biological reductionism describes the idea that all human and social phenomena can in principle be explained by a proper understanding of the functioning of the brain or basic biological processes (Savulescu and Earp, 2014). In discussing romantic love, Fisher (2005) abstains from any mention of romance, describing it as “one of three primordial brain networks that evolved to direct mating and reproduction” and claiming lust emerged to prod us into seeking “sexual union with almost any partner”.
While I do not reject the possibility that, for example, humans’ experiential worlds, consciousness, etc., could theoretically be fully explained by neurology, I analyse the current state of neurology as nowhere close to providing sufficiently deep insight into the phenomena. A workable and useful understanding of human meaning-making and how we navigate the world is at present fully beyond the reach of the various disciplines prefixed by “neuro-”, and as such, a pluralist theoretical and methodological approach to human robot relations is necessary (Sætra, 2019a).
2.2.The various types of love
Having established the theoretical basis for seeing love as a concept susceptible to change, it is necessary to establish a workable typology for evaluating and analysing different varieties of love. As noted by Sullins (2012), such a framework is notably absent from most of the literature on robots and love, as few authors who address the topic of love (or other love related concepts for that matter) and robots connect their discussions to explicit and established typologies of love.
The absence of proper definitions is unfortunate, as proper conceptual analyses allow us to identify when we ourselves, or others, rely on dubious or unclear concepts (Heil, 1999). Furthermore, proper conceptualisations have two other major advantages. Firstly, it enables us to avoid unnecessary “skin-deep disagreements” that arise from using the same words with different but unannounced content (Næss, 2016). Secondly, a lack of conceptualisation makes it difficult to use existing research as shoulders to stand on – whether these be the shoulders of giants or not.
My main goal is not to chart or trace the various empirical versions of love found in specific historical epochs or cultures but to make clear what terms can meaningfully be used to describe the kind of relationship that robots may be – or become – capable of participating in. At the outset I mentioned the definition of love as that love that occurs between human beings who decide to live together in partnership. This, however, is not specific enough, as such relationships can be referred to as, for example, conjugal, intimate, romantic, mutual or passionate.
From the literature on cultural perspectives on love, it is often assumed that love is a universal emotion that manifests itself in a wide variety of ways, “because culture has been found to have an impact on people’s conceptions of love and the way the feel, think, and behave in romantic relationships” (Karandashev, 2015, p. 3). Levine, Sato, Hashimoto, and Verma (1995, p. 555) pointed out that, at the time of writing, “virtually all” empirical studies of romantic love were unicultural, with most being theoretical accounts that emphasised an American perspective of love. This perhaps led to the perception that love is more universal than it really is.22
Romantic love is at times used to describe a form of courtly love, which is characterised by an elevation of the female, suffering related to separation, and an intense and almost transcendental experience by the lovers (Karandashev, 2015).33 Singer (2009), however, describes a move from courtly to romantic love and distinguishes between the two terms. Key aspects of romantic love are as follows: “emotional highs, exhilaration, passion, and elation” (Karandashev, 2015, p. 4). Romantic love is thus clearly distinguished from platonic love, which is spiritual in nature, characterised by less emotional closeness and not associated with exclusivity (Karandashev, 2015).
Branden (2008) and Viik (2020) argue that “romantic love” is the same as erotic and passionate love – a view that diverges from my approach, as it is important to separate romantic love from passionate love and sexual attraction. Sex is often an important part of romantic love, but it is not a necessary component of it (Karandashev, 2015). While some have argued that romantic love is a western phenomenon, Karandashev (2015) argues that at least passionate love is universal. Culture is argued to be key in the transformation of passionate love into romantic love; passion and lust are biological, while romantic love is cultural (Karandashev, 2015; Maslow, 1987).
Different cultures vary considerably with regard to the importance individuals attach to falling and being in love and how important passionate love is for decisions related to marriage and long term partnership (Karandashev, 2015; Levine et al., 1995). Cultures also vary as to whether love is considered a precondition for marriage (Levine et al., 1995). A high appreciation of love is also positively correlated with high economic standards of living, high marriage and divorce rates, and low fertility rates (Levine et al., 1995). Furthermore, culture imposes a form of control on romantic love, and this affects how people experience love, what they expect from love, and how often and quickly they fall in love (Karandashev, 2015).
Most authors discussing robot love refer to some variety of love resembling the romantic love discussed above, but important nuances are lost in the slightly different ways in which the term is used, and how various authors include and omit different aspects of romantic love. This implies that a clearer typology would be beneficial, and I here apply Lee’s (1973) typology of love, consisting of six types of love with three primary types and three secondary – or compound – types. The typology is shown in Fig. 1.
This model has been used as the basis for many examinations of cultural variations of love, and Hendrick and Hendrick (1986) used it as the basis for the Love Attitude Scale instrument (Neto et al., 2000). This model shows that the robot love discussed in this article might in fact be one of three secondary types, which are the types that best describe the kinds of lasting and exclusive partnerships I discuss. Mania is love based on a combination of eros and ludus and agape combines eros and storge, while pragma is the practical love stemming from the combination and ludus and storge. It also allows for an explicit connection between the debate on robot friendship and robot love (Danaher, 2019). For example, if one believes that a robot can be a friend, and that it can also provide passionate love, agape might in fact be achievable.
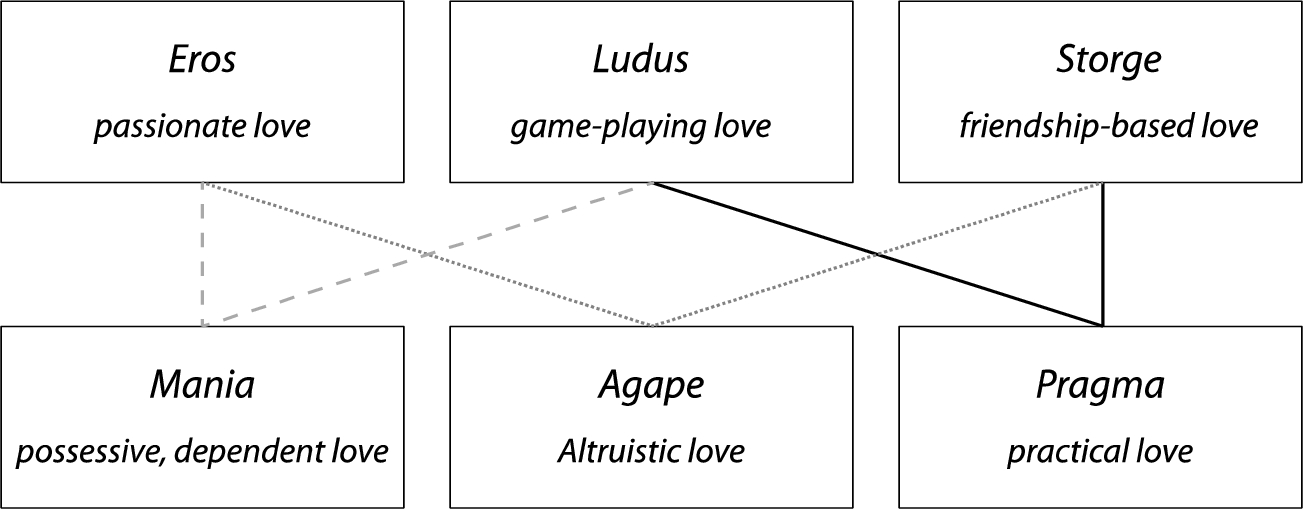
Another advantage with this model is that it allows for the distinction between types that are mostly biologically determined and factors that are more susceptible to cultural influence. The types most clearly related to strong personal feelings (eros, mania, and agape) are not as susceptible to variation by culture as the ones involving stricter social rules (pragma, storge, and ludus) (Neto et al., 2000).
3.Love robots and two mechanisms of change
Having established love as a cultural and malleable phenomenon, it is time to examine how love robots relate to this phenomenon. While the effects of love robots on the very concept of love has not previously been examined in detail, it is mentioned in passing by several authors. Nyholm and Frank (2019) state that robot interaction might change our expectations of love and thus change “the very conception” of human relationships. de Graaf (2016) also refers to Verbeek’s (2008) technological mediation and how our use of new technologies lead to shifts in beliefs and practices. The process of using and understanding a theory is fundamentally intertwined with “the evolving prevailing social norms” (de Graaf, 2016, p. 591). Finally, Viik (2020, p. 52) notes that as robot partners proliferate, “the experience of love will mutate”, and we might develop new “love-like feelings” towards these non-humans.
This section begins with an introduction of the types of robots discussed. I then turn to two mechanisms of change that allows us understand why loving robots might in fact change the very concept of love.
3.1.Robots that love
A love robot is here used to describe robots intentionally built to be capable of sustaining a relationship with a human partner. As numerous authors have shown, humans may feel an attachment to any kind of robot and even much simpler technical artefacts such Tamagotchis, sex dolls, or simple computers and cars (Levy, 2009; Pettman, 2009; Turkle, 2017). Nevertheless, as I examine the potential for relationships characterised by a certain degree of interaction and mutuality, I disregard this broader phenomenon of anthropomorphisation and one-sided attachment.
The technical details of the robots in question will not be discussed in detail, since love as a concept and its potential change is the focus of the article. Moreover, I refer to Devlin (2018) and Nyholm and Frank (2019) for a brief discussion of the “love” (sex) robots currently available, such as Roxxxy, Samantha, and Harmony. The current discussion regards near future love robots based on currently existing technology. I do not discuss advanced hypothetical androids, such as Data in Star Trek or Adam from Machines Like Me (McEwan, 2019; Wilcox, 1993). Imagine instead that I refer to love robots that are physically like today’s most sophisticated robots and sex dolls, combined with the capacities of conversation and language generation seen in, for example, GPT-3. While impressive, there are clear and quite important limitations to what GTP-3 and current AI can do (Floridi and Chiriatti, 2020; Marcus and Davis, 2019).
Love robots are thus conceived of as a combination of sophisticated robotics coupled with cutting edge AI. Such robots will not be assumed to be conscious, have feelings, a proper understanding of human phenomena, etc. However, they will be physically appealing, physically functional, cognitively impressive in narrow domains, and also able to carry out conversations and please people by their imitation of human social skills.
3.2.Robotomorphy and social change
One way to change love as a concept is to redefine it and convince others that your definition is in fact a true description of the phenomenon. Descriptions of robots capable of love, based on new or adjusted conceptualisations of love, could thus potentially become self-fulfilling prophecies (Pettman, 2009). For example, love might change as a consequence of seeing it as only consisting of particular actions and nothing more. This relates both to how love is expressed and how it is “proven”, measured, or understood.
The key question is whether love is something humans experience and feel, or simply a set of actions or performances. Several actors point to Goffman (1978) and his account of performances when discussing human–robot relationships of various kinds. de Graaf (2016, p. 594) blatantly states that criticism based on the idea that robots simply go through the motions is deceptive and ineffective, since “the currency of all human social relationships is performance”. Many also point to Levy (2009) and his insistence that if a robot says it loves someone, and acts as if it does, this should be taken at face [sic] value. This is the functional definition of love. The ethical behaviourism of Danaher (2020b) is another manifestation of a similar idea. He rejects the notion that what occurs inside a being matters from an ethical perspective and emphasises performances and the outside. It is on the outside, he argues, that robots can be roughly equal to human beings, and if this is what matters, a robot might very well be said to love.
Sullins (2012, p. 408), however, states that love is more than behaviour, as “it is a powerful emotion”. While performance might be important to human relationships, it is quite a leap to state that performance is all there is in human relationships. A robot that merely performs love would, some argue, be akin to hiring an actor to be your lover, or even to be in a relationship with a lover that feels nothing for you but pretends that they do (Nyholm and Frank, 2017).
The earlier discussion of love as a concept shows that love can indeed be more than performing the right actions and saying the right things. Sullins (2012) argues that many roboticists have ignored the deep and nuanced understandings of love from various disciplines, and he emphasises cognitive science and philosophy. Human beings are “at home in the world”, and important aspects of human existence might in fact only be achievable and understandable by socially situated beings (Hayles, 2006). A loving relationship may be described by a behaviourist in terms of the various actions the parties perform, but it might just as well be described as the experiences of those involved. Neither is wrong, and neither approach is complete.
Hauskeller (2017) argues that we love our partners not only because of what they do but why they do what they do. However, a common justification for the behaviourist approach is that there is “no way of getting inside” other people’s heads, which means that their inner lives are as inaccessible to us as the hypothetical “inner lives” of robots (Danaher, 2019). Thus, or so it goes, we might as well treat them as equals and disregard whatever may or may not be happening on the inside.
This takes us to the mechanism of change that Sætra (2019b, 2020b) labels robotomorphy. This is inspired by the term ratomorphy, which describes the tendency of animal researchers to reduce human beings into something compatible with the traits of rats (Koestler, 1967). Roboticists and robot ethicists may similarly lead us to a situation in which all human phenomena are understood according to a computational, mechanistic, and behaviourist logic, as this easily allows for the inclusion of robots in such phenomena. By doing so, however, they are changing the concepts. In what follows, our understanding of the concept and ourselves changes accordingly. The process is, of course, not that straight forward, and the contribution from the robot literature is merely a part of the larger discourse that shapes love as a cultural concept. However, as robots and new technologies become increasingly prominent in modern societies, the language and metaphors of technology increasingly permeate other domains of human existence. Many attempts have been made to challenge the metaphor of computational humans, but it is powerful (Hayles, 2006; Ibáñez and Cosmelli, 2008; Pettman, 2009).
3.3.Learning by loving differently
A key hypothesis of Levy (2009) is that robots will be functional to such a degree that people will prefer them to human companions. Others also argue that people are in fact starting to prefer robots to humans in certain contexts (Nyholm and Frank, 2019; Pettman, 2009; Sullins, 2012; Turkle, 2017; Yamaguchi, 2020).
The reason for this is that robots will be able to provide a considerable amount of what human beings desire. Robots, it is argued, can become some type of “super partner”, intimating what Sullins (2012) calls perfect love. A robot can be programmed to adapt to its user’s desires and preferences and aim for nothing more than optimising the pleasing effect it has on its user. Unlimited affection, patience, magnanimity, forgiveness, forbearance, adaptability or stability as desired; self-sufficiency or dependences as decided; and a personalised balance of servility and oppositional attitude. With such possibilities, it is easy to see that robots have great pleasing potential (Viik, 2020). They can also be aesthetically ideal and will not age.
This implies that there are both negative and positive reasons for adopting robots as partners. On the one hand, robots are embodied with novel capabilities that many will find attractive regardless of their overall situations or historical relationships with human beings. On the other hand, others highlight the negative reasons in the form of disappointments resulting from direct negative experiences with other humans or the lack of access to human partners (Levy, 2009). As noted in Section 2, love is a human need, and being deprived of it might lead to a form of loneliness that can be experienced rather dramatically (Devlin, 2018; Levy, 2009). The negative reasons are, however, not illegitimate, and they are discussed further in Section 4.2.
Others, however, have noted that robots lack certain aspects, such as true mental states or “authenticity” (Turkle, 2017). Human vulnerability, for example, is seen as an important aspect of human relationships, and robots do not have this, some say (Coeckelbergh, 2011). Nevertheless, they might a) fake it, and b) have robot vulnerabilities and shortcomings that may in fact prove to be effective (Viik, 2020). Data in Star Trek, for example, is a lovable character with super-human capabilities combined with various vulnerabilities (mainly based on “feelings” related to not being a true human). Mutuality, equality, and “authenticity” are often considered important for friendship, and robots are routinely criticised for being capable of none of these things (Danaher, 2019).
Despite their shortcomings, Nyholm and Frank (2019) argue that robots can “block off” human relationships, and Danaher (2019) discusses how robot relationships may lead to the “corrosion” of the value of human relationships. These authors describe a process in which robot relationships are convenient and pleasurable, which in this sense blocks off other relationships described as potentially more valuable.
Robots might also replace humans for efficiency and convenience reasons, as described by Sparrow and Sparrow (2006) in the context of aged care and Danaher (2019) in his discussion of robot friendship. Love robots are different from care robots in the sense that no one apart from the employers of escorts, sex workers, etc., has an obvious financial incentive to replace human workers with love robots. We shall assume that love robots cannot be placed on a factory assemble line. With love robots, replacement that is not based on outperforming humans in love will thus be based on the human trade-off between quality of love and general convenience. If human beings have limited time and attention for social relationships, we might quite simply crowd out humans whenever we introduce social robots capable of forming relationships with us (Bryson, 2010).
The key point is that replacement, blocking off, and corrosion of human relationships may have consequences beyond a mere shift in the balance between robots and humans in our social lives. As we increasingly foster love relationships with robots, our very notion of what a loving relationship is will change. Our expectations of the relationship and what beings do in a relationship changes, and this will plausibly influence the very concept of love. As demonstrated in the cultural and historical studies of love described in this article, the concept has repeatedly changed throughout history. This occurs as a response to economic, societal, and cultural changes and our interactions with each other and these very phenomena. Love robots constitute a potential catalyst for such change (Yamaguchi, 2020).
4.With robots towards deficiency love
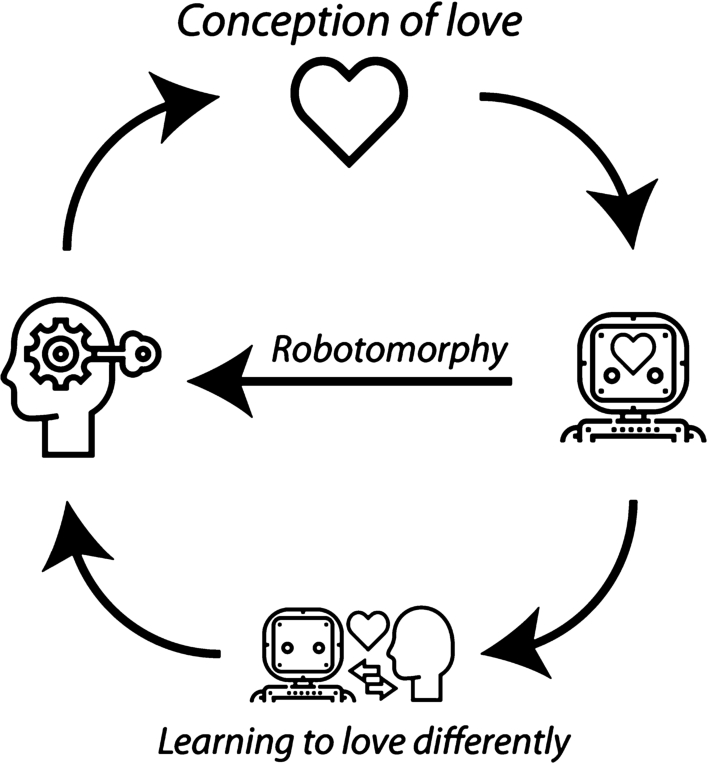
If what we make and what we are co-evolve, the machines we make, and how we understand them and the things they do will lead to changes in what we are. This co-evolution includes “cultural beliefs and practices” (Hayles, 2006). Our cultural concept of love will influence how we make machines, and these machines, and how they are used, received, and understood will then influence the very concept of love involved in their inception. The two mechanisms of change are shown in Fig. 2. It is also worth noting that the process of change is circular and not a one-off occurrence; as the conception of love and ourselves as human being changes, this once again changes how we design robots and the kinds of loving relationships we enable them to enact.
Moving towards new forms of love, we might see slight shifts based on the introduction of robots, or we might see more fundamental aspects of love, such as monogamy and commitment, challenged (Pettman, 2009). While some might be wary of such change, it is also necessary to consider the potential benefits of moving toward “more complex and subtle forms of intimacy than the anthropocentric, heteronormative versions that continue to dominate the mainstream market” (Pettman, 2009).
Fig. 2.
The two mechanisms of change.
4.1.Towards a pathological and practical deficiency love
With the two mechanisms in place, it remains for us to examine what sort of love these robots move us towards. Lee’s (1973) typology presented in Fig. 1 allows us to examine which forms of love robots may be conducive to promote. Of the three primary types (eros, ludus, and storge), I argue that ludus is the type of love that robots can most easily aspire to. It is based on game-playing and is characterised by a lack of deep commitment and an absence of deeply passionate feelings. I develop this argument below. As will become obvious, these types are also susceptible to the mechanism of change described in this article, as we have seen attempts to define human relationships as something merely behavioural that robots may aspire to (Danaher, 2019). Storge is a love based on friendship, and if we accept a slightly behaviourist account of friendship, robots can also aspire to storge.
Eros involves intense emotions. It is the passionate love, and I argue that eros is the type most unlikely to be attainable in relationships with robots. This may seem counterintuitive, as current sex robots are demonstrably capable of sex – and arguably not much else. Eros is, however, often associated with deep passion and a sort of madness inspired by a fascination with one’s partner. Sex is part of eros, but sex alone is not sufficient. The current literature shows very few accounts of these kinds of emotions for robots. While love robots provide both love and sex, the two phenomena do not combine to form eros. Instead, they are more akin to playful and friendly partners that also provide sex.
Levy (2009) and Devlin (2018) narrate various grounds for affection for robots, and many of them describe attachment based on safety, convenience, entertainment, and a sort of continuation of the processes that make infants “love” their blankets, children their teddy bears, and adults their computers, cars, and other objects. Safety and comfort are most descriptive of storge, and convenience and entertainment of ludus.
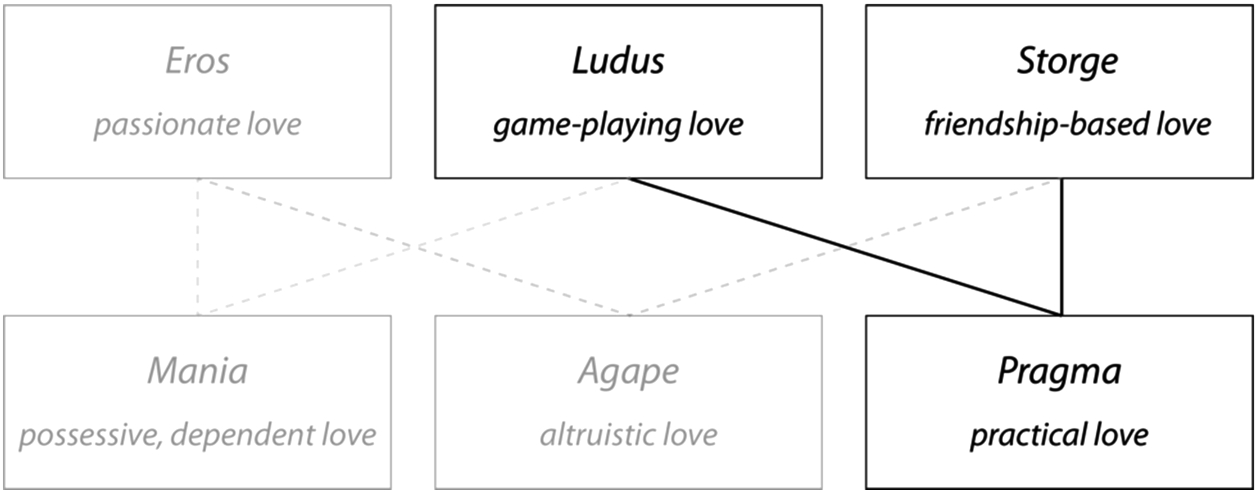
Of the secondary types (mania, agape, and pragma), a consequence of eliminating eros is that pragma becomes the kind of love most likely to characterise a human–robot relationship, as shown in Fig. 3. When a human loves a robot, the robot can be a supporting “friend” in the sense that it provides positive attention and a form of care and affection. It will listen to its user, comfort its user, provide uplifting feedback and general companionship in whatever daily activities the user desires. It will, in this sense, provide storge. Furthermore, it will be playful and fun – flirting, dancing and providing the non-committal and superficial form of courtship and ludic love.
Fig. 3.
The six kinds of love and the consequence of removing Eros.
It must be noted that sex can be a part of a pragmatic – or practical – relationship. Considering the near future of robots outlined above, pragma with sex is arguably achievable. It will also be what is maximally attainable by near future robotics, as true eros seems to be beyond the reach of robots as we know them. The sexual component of robot relationships is thus understood as something more akin to advanced mutual masturbation between friends than the passionate sex between humans in love. The preceding considerations are speculative and based on the anecdotal evidence provided in the literature on human–robot relationships. Until more empirical data is available on the possibility of attaining eros between humans and robots, I ask the reader to imagine for a second if they believe a sexual relationship with a robot can be imagined as containing the kind of passion I have excluded. I accept the argument that such thought experiments are in themselves not sufficient to prove this point, as people are not fully aware of or willing to accept the kinds of emotions they have for robots (Levy, 2009). However, knowing this I have somewhat reluctantly accepted the possibility of storge and ludus (also clearly debatable) but consider eros as highly unlikely.
While most authors on robot relationships write about romantic love, this is not the most appropriate term as this is usually tightly linked to eros. The kind of love roboticists and robot ethicists actually describe, I argue, is pragmatic love with sex. This involves a depreciation of romance and a rather instrumental view of sex as a potential, but not integral, part of relationships.
In addition to Lee’s types, Maslow (1973) provides a distinction between being-love (B-love) and deficiency-love (D-love), which describes a potentially problematic aspect of the proliferation of love robots and its corresponding discourse. B-love is a form of self-less love – a love “so great and so pure (unambivalent) for the object itself that its good is what we want, not what it can do for us” (Maslow, 1973, pp. 147–148). D-love, on the other hand, is described as a more practical and self-oriented kind of love.
It seems blatantly obvious that robot love is an extreme form of D-love – a form oriented exclusively towards the self and the interests of the human partner, one I have already argued to be practical. It is non-controversial to argue that a robot has no “self” and even no conception of good or true interests akin to human interests. The phenomenological approach surely allows us to argue that humans will anthropomorphise love robots, attribute both minds and interests to them, and thus conceivably at times act so as to help the robot realise some imagined good. In a pedestrian sense, it has a need for power, so charging it will objectively do it good. It may, however, also require more, as the robot can say that it is sad and needs a hug, and the human might respond by providing this. Still, it seems highly unlikely that such phenomena constitute the pure and unambivalent love described by Maslow.
Furthermore, seeing all the benefits usually touted by robot ethicists – what is argued to make them attractive partners – it becomes immediately clear that need gratification to the extreme is all a robot can provide: unlimited attention, affection, proclamations of love, etc. With practical D-love as the basic model, and the addition of a servile and fully one-sided attitude, robot love becomes the polar opposite of B-love or the mutual and self-less love that is often portrayed as ideal love. Robot love is based on need-gratification and self-interest, and it appears to be a form of pathological love in which very few human beings would be interested in, or capable of, playing the robot’s role in the relationship as here described. As noted in the literature on the nature of political tyranny, there is a form of valuable beauty in equality. It consists of “knowing and being known by others”, and “[w]here there is inequality this human knowledge is destroyed by muteness or distorted by the illusions which the relations of superiors and inferiors breed” (Kateb, 1977). If practical and one-sided deficiency love becomes the ideal kind of love, then only robots will, in the end, be potential partners. For practical reasons this might be construed as a major cause for concern, most importantly because of the effects this may have on the humans in such relationships. These effects, on individuals and in turn our societies, are a key are for further research suggested by this article.
4.2.Further areas of further research
While the change of love as a concept just described is portrayed as problematic, it is also speculative. It indicates the need for further research on the topic – in particular empirical examinations of the hypotheses proposed and potential positive consequences of new types of robots (Devlin, 2018). In closing I propose some additional topics for further research, mainly related to the broader ethical consequences of robot love.
4.2.1.“Rather deficiency love than no love”
As mentioned in Section 3.3, there are many legitimate reasons why people might have a desire to seek robot love, such as not being able to find human love (Sullins, 2012). People’s physical or psychological constitution might drastically impair someone’s ability to find a human partner. Elderly people and the disabled are routinely used as examples in this context, which has a parallel to the debate about sex robots (Yamaguchi, 2020).
Relationships are one of the best predictors of good health and subjective well-being, and the lack of it is thus deeply problematic (Earp and Savulescu, 2018). Loneliness, Nyholm and Frank (2019) explain, is an aversive state, and if robots can alleviate this and provide some sort of love, we might have a moral imperative to allow this (Sullins, 2012). As Fromm (1994, p. 17) has noted, the need to belong and relate to others is very strong, and to “feel completely alone and isolated leads to mental disintegration just as physical starvation leads to death”.
In our times this is also connected to more structural phenomena, such as the evolution of online dating and the inability of many young men to find a partner and have a family. This is connected to what is referred to as an incel (an involuntarily celibate individual) – a term that has become known due to the controversial online communities in which such individuals gather and several related violent events. In a market for love, some individuals will unfortunately have quite low value, and as technology enables the market to clear more efficiently on a much grander scale than before, those of “low value” will lose the ability to form human relationships. Some 20 percent of the population may in fact be “unmatchable” on online dating platforms, thus the question is how should their love needs be addressed (Pettman, 2009). Robots can help, as even practical D-love will often be better than no love.
4.2.2.Social control of love
Love is a social construct both in the philosophical sense and in the sense that society has a particular interest in how relationships are arranged. Different cultural modes of love will, for example, be associated with very different norms related to the display of public affection. China, for example, is often associated with a mode of love in which intimacy and love is not displayed in public (Karandashev, 2015). In Norway, on the other hand, it is common to see people showing their affection very publicly.
Several authors have noted that those in relationships with robots today constitute a form a sexual minority, and they emphasise the importance of having one’s relationships recognised by society. Yamaguchi (2020) connects robot relationships with the experiences of other sexual minorities. LGBT-individuals have long experienced a desire for relationships that have not been fully socially sanctioned. While there is a long way to go in many respects, there has clearly been some movement in many societies. The natural implication of the argument is that love for robots might be a new candidate for social recognition, and if the possibility of such love is accepted, then changing love as a concept into something that allows for such love is a good thing.
4.2.3.Gender, reproduction, and social issues
Opinions and experiences of love and marriage vary between genders. This relates to how individuals understand love, what they look for in partners, and how they relate love with sex (Coontz, 2006; Karandashev, 2015; McKenzie, 2015). The cultural mode of love is also strongly connected to social control and gender roles (Valsiner, 2014).
As the discipline of robotics and philosophy largely consist of males, it is important to ask whether or not the kind of love that is constructed in the discourse on love robots is in fact a biased version heavily skewed towards male patterns of love and male modes of reasoning and seeing the world in general. Neto et al. (2000), for example, show that men are more ludic than women, and women more agapic. As I have argued that eros, and thus agape, is excluded from the kind of love now constructed, this indicates a relevant concern for gender bias. It is thus important to ensure the inclusion of a broad set of people and perspectives in the attempt to define love and design robots.
Other obvious issues that must be researched during the normalisation of robot love relate to the implications this will have on human socialising and social structures, as well as the more practical issue of reproduction (Yamaguchi, 2020). We might, for example, see a development towards satisfying the need for sex and a couple-based relationship with robots, where this opens the possibility of more active socialising outside of the relationship. The relationship with robots might become something limited and private, and the freedom a person has in such a relationship might free up time to associate with others to a higher degree than would be possible in a traditional human romantic relationship. This is, of course, highly speculative, and there are countless plausible trajectories to examine. Common to all of them, however, is the need to come up with a solution for reproduction, as birth-rates will most likely be quite low in human–robot relationships.
5.Conclusion
Can robots become the catalysts for changing love as a concept? I have argued that it might, and this is in line with the notion that robots can be morally disruptive and cause moral revolutions (Danaher, 2020a). Sætra (2021) has similarly argued that deceptive social robots may lead to long term changes in human cooperation and cultures of trust. The current article is a contribution in the same vein, and the cultural and dynamic aspects of cultural phenomena are here elaborated as two potential mechanisms of change. I propose the hypothesis that robots influence how we define and understand love and that our actual experiences with them will also have consequences for this understanding.
Love as a cultural concept is continually changing, and change is by no means inherently bad. Change can be good, as it might lead to a situation in which previously excluded minorities might be included in socially sanctioned forms of love. Furthermore, love robots might provide love to the otherwise unlovable. However, change can also be for the worse. If love changes towards a pathological form of self-interested deficiency love, some might plausibly argue that we lose something very valuable, as the “purer” form of being-love, and forms of altruistic love, might be morally superior and valuable for human beings.
In addition, the form of love here described, a practical love where sex is separated from passion and romance is not necessarily gender neutral. The love robots being made, and the literature on robots, unveil important and at times stark differences between genders. Moving forward, it is imperative to include a more diverse perspective of love in the development and discourse on robot love, and this article points towards several frameworks and disciplines in which relevant research has been, and is being, done.
Notes
1 Platonic love and platonic idealism must be distinguished, and the former is discussed in the discussion of types of love below.
2 When it comes to the idealisation of love, on the other hand, Karandashev (2015) states that this is a western phenomenon, and that people from other cultures are more inclined to view everlasting passionate and romantic love as something of a “fairy tale”, characterising it as an initial phase in a relationship before “real” love sets in (Karandashev, 2015, p. 13).
3 While romantic love and romanticism are clearly related, I do not discuss romanticism in general. See Coeckelbergh (2017) for a general account of romanticism and technology.
References
1 | Borenstein, J. & Arkin, R. ((2019) ). Robots, ethics, and intimacy: The need for scientific research. In On the Cognitive, Ethical, and Scientific Dimensions of Artificial Intelligence (pp. 299–309). Springer. doi:10.1007/978-3-030-01800-9_16. |
2 | Branden, N. ((2008) ). The Psychology of Romantic Love: Romantic Love in an Anti-Romantic Age. Penguin. |
3 | Bryson, J.J. ((2010) ). Robots should be slaves. In Y. Wilks (Ed.), Close Engagements with Artificial Companions: Key Social, Psychological, Ethical and Design Issues (pp. 63–74). Amsterdam: John Benjamin. doi:10.1075/nlp.8.11bry. |
4 | Churchland, P.S. ((2011) ). Braintrust: What Neuroscience Tells Us About Morality. Princeton: Princeton University Press. |
5 | Coeckelbergh, M. ((2011) ). Artificial companions: Empathy and vulnerability mirroring in human–robot relations. Studies in Ethics, Law, and Technology, 4: (3). doi:10.2202/1941-6008.1126. |
6 | Coeckelbergh, M. ((2017) ). New Romantic Cyborgs: Romanticism, Information Technology, and the End of the Machine. Cambridge: MIT Press. |
7 | Coontz, S. ((2006) ). Marriage, a History: How Love Conquered Marriage. Penguin. |
8 | Danaher, J. ((2019) ). The philosophical case for robot friendship. Journal of Posthuman Studies, 3: (1), 5–24. doi:10.5325/jpoststud.3.1.0005. |
9 | Danaher, J. (2020a). Robots and moral revolutions. Unpublished manuscript. |
10 | Danaher, J. ((2020) b). Welcoming robots into the moral circle: A defence of ethical behaviourism. Science and Engineering Ethics, 26: (4), 2023–2049. doi:10.1007/s11948-019-00119-x. |
11 | Danaher, J. & McArthur, N. ((2017) ). Robot Sex: Social and Ethical Implications. MIT Press. |
12 | de Graaf, M.M. ((2016) ). An ethical evaluation of human–robot relationships. International Journal of Social Robotics, 8: (4), 589–598. doi:10.1007/s12369-016-0368-5. |
13 | Devlin, K. ((2018) ). Turned on: Science, Sex and Robots. London: Bloomsbury Sigma. doi:10.5040/9781472950888. |
14 | Earp, B.D. & Savulescu, J. ((2018) ). Love drugs: Why scientists should study the effects of pharmaceuticals on human romantic relationships. Technology in Society, 52: , 10–16. doi:10.1016/j.techsoc.2017.02.001. |
15 | Finkel, E.J., Hui, C.M., Carswell, K.L. & Larson, G.M. ((2014) ). The suffocation of marriage: Climbing Mount Maslow without enough oxygen. Psychological Inquiry, 25: (1), 1–41. doi:10.1080/1047840X.2014.863723. |
16 | Fisher, H. ((2005) ). Why We Love: The Nature and Chemistry of Romantic Love. New York: Henry Holt and Company. |
17 | Floridi, L. & Chiriatti, M. ((2020) ). GPT-3: Its nature, scope, limits, and consequences. Minds and Machines. doi:10.1007/s11023-020-09548-1. |
18 | Fromm, E. ((1994) ). Escape from Freedom. New York: Holt. |
19 | Goffman, E. ((1978) ). The Presentation of Self in Everyday Life. London: Harmondsworth. |
20 | Greenfield, P.M. ((1999) ). Cultural change and human development. New Directions for Child and Adolescent Development, 1999: (83), 37–59. doi:10.1002/cd.23219998305. |
21 | Hauskeller, M. ((2017) ). Automatic sweethearts for transhumanists. In J. Danaher and N. McArthur (Eds.), Robot Sex: Social and Ethical Implications (pp. 203–218). Cambridge: MIT Press. |
22 | Hayles, N.K. ((2006) ). Unfinished work: From cyborg to cognisphere. Theory, Culture & Society, 23: (7–8), 159–166. doi:10.1177/0263276406069229. |
23 | Hayles, N.K. ((2010) ). My Mother Was a Computer: Digital Subjects and Literary Texts. University of Chicago Press. |
24 | Heil, J. ((1999) ). Analytic philosophy. In R. Audi (Ed.), The Cambridge Dictionary of Philosophy, Cambridge: Cambridge University Press. |
25 | Hendrick, C. & Hendrick, S. ((1986) ). A theory and method of love. Journal of Personality and Social Psychology, 50: (2), 392. doi:10.1037/0022-3514.50.2.392. |
26 | Hobbes, T. ((1946) ). Leviathan. London: Basil Blackwell. |
27 | Ibáñez, A. & Cosmelli, D. ((2008) ). Moving Beyond Computational Cognitivism: Understanding Intentionality, Intersubjectivity and Ecology of Mind. Springer. |
28 | Illouz, E. ((1997) ). Consuming the Romantic Utopia: Love and the Cultural Contradictions of Capitalism. Univ. of California Press. |
29 | Karandashev, V. ((2015) ). A cultural perspective on romantic love. Online Readings in Psychology and Culture, 5: (4), 2. doi:10.9707/2307-0919.1135. |
30 | Karandashev, V. ((2016) ). Romantic Love in Cultural Contexts. Springer. |
31 | Kateb, G. ((1977) ). Freedom and worldliness in the thought of Hannah Arendt. Political Theory, 5: (2), 141–182. doi:10.1177/009059177700500202. |
32 | Koestler, A. ((1967) ). The Ghost in the Machine. New York: The Macmillan Company. |
33 | Lee, J.A. ((1973) ). Colours of Love: An Exploration of the Ways of Loving. Toronto: New Press. |
34 | Levine, R., Sato, S., Hashimoto, T. & Verma, J. ((1995) ). Love and marriage in eleven cultures. Journal of Cross Cultural Psychology, 26: , 554–571. doi:10.1177/0022022195265007. |
35 | Levy, D. ((2009) ). Love and Sex with Robots: The Evolution of Human–Robot Relationships. New York. |
36 | Marcus, G. & Davis, E. ((2019) ). Rebooting AI: Building Artificial Intelligence We Can Trust. Pantheon. |
37 | Marti, P. ((2010) ). Robot companions: Towards a new concept of friendship? Interaction Studies, 11: (2), 220–226. doi:10.1075/is.11.2.07mar. |
38 | Maslow, A.H. ((1973) ). The Farther Reaches of Human Nature. Middlesex: Penguin Books. |
39 | Maslow, A.H. ((1987) ). Motivation and Personality. Delhi: Pearson Education. |
40 | McEwan, I. ((2019) ). Machines Like Me. Canada: Knopf. |
41 | McKenzie, L. ((2015) ). Age-Dissimilar Couples and Romantic Relationships: Ageless Love? Springer. |
42 | Næss, A. ((2016) ). En del elementære logiske emner. Oslo: Universitetsforlaget. |
43 | Neto, F., Mullet, E., Deschamps, J.-C., Barros, J., Benvindo, R., Camino, L., … Machado, M. ((2000) ). Cross-cultural variations in attitudes toward love. Journal of Cross-Cultural Psychology, 31: (5), 626–635. doi:10.1177/0022022100031005005. |
44 | Nyholm, S. ((2020) ). Humans and Robots: Ethics, Agency, and Anthropomorphism, London: Rowman & Littlefield. |
45 | Nyholm, S. & Frank, L.E. ((2017) ). From sex robots to love robots: Is mutual love with a robot possible? In J. Danaher and N. McArthur (Eds.), Robot Sex: Social and Ethical Implications (pp. 219–244). Cambridge: MIT Press. |
46 | Nyholm, S. & Frank, L.E. ((2019) ). It loves me, it loves me not: Is it morally problematic to design sex robots that appear to love their owners? Techné: Research in Philosophy and Technology. |
47 | Nyholm, S. & Smids, J. ((2020) ). Can a robot be a good colleague? Science and Engineering Ethics, 26: (4), 2169–2188. doi:10.1007/s11948-019-00172-6. |
48 | Pettman, D. ((2009) ). Love in the time of tamagotchi. Theory, Culture & Society 26: , 189–208). |
49 | Phillips, C. ((2007) ). Socrates in Love: Philosophy for a Die-Hard Romantic. WW Norton & Company. |
50 | Raggio, O. ((1958) ). The myth of Prometheus: Its survival and metamorphoses up to the eighteenth century. Journal of the Warburg and Courtauld Institutes, 21: (1/2), 44–62. doi:10.2307/750486. |
51 | Sætra, H.S. ((2019) a). Explaining social phenomena: Emergence and levels of explanation. In Social Philosophy of Science for the Social Sciences (pp. 169–185). Springer. doi:10.1007/978-3-030-33099-6_10. |
52 | Sætra, H.S. ((2019) b). The ghost in the machine. Human Arenas, 2: (1), 60–78. doi:10.1007/s42087-018-0039-1. |
53 | Sætra, H.S. ((2020) a). First, they came for the old and demented. Human Arenas, 1–19. doi:10.1007/s42087-020-00125-7. |
54 | Sætra, H.S. ((2020) b). The parasitic nature of social AI: Sharing minds with the mindless. Integrative Psychological and Behavioral Science, 54: , 308–326. doi:10.1007/s12124-020-09523-6. |
55 | Sætra, H.S. ((2020) c). Toward a Hobbesian liberal democracy through a Maslowian hierarchy of needs. The Humanistic Psychologist. |
56 | Sætra, H.S. ((2021) ). Social robot deception and the culture of trust. Paladyn, Journal of Behavioral Robotics, 12: (1). doi:10.1515/pjbr-2021-0021. |
57 | Savulescu, J. & Earp, B.D. ((2014) ). Neuroreductionism about sex and love. Think, 13: (38), 7. doi:10.1017/S1477175614000128. |
58 | Sayer, A. ((1992) ). Method in Social Science: A Realist Approach. London: Routledge. |
59 | Shelley, M.W. ((2012) ). Frankenstein: Or, the Modern Prometheus. Toronto: Broadview Press. |
60 | Singer, I. ((2009) ). The Nature of Love: Courtly and Romantic (Vol. 2). Chicago: University of Chicago Press. |
61 | Sparrow, R. & Sparrow, L. ((2006) ). In the hands of machines? The future of aged care. Minds and Machines, 16: (2), 141–161. doi:10.1007/s11023-006-9030-6. |
62 | Sullins, J.P. ((2012) ). Robots, love, and sex: The ethics of building a love machine. IEEE Transactions on Affective Computing, 3: (4), 398–409. doi:10.1109/T-AFFC.2012.31. |
63 | Tomasello, M. ((2009) ). Why We Cooperate. Cambridge: MIT Press. |
64 | Triandis, H.C., Carnevale, P., Gelfand, M., Robert, C., Wasti, S.A., Probst, T., … Chen, X.P. ((2001) ). Culture and deception in business negotiations: A multilevel analysis. International Journal of Cross Cultural Management, 1: (1), 73–90. doi:10.1177/147059580111008. |
65 | Turkle, S. ((2017) ). Alone Together: Why We Expect More from Technology and Less from Each Other. Hachette UK. |
66 | Valsiner, J. ((2014) ). An Invitation to Cultural Psychology. Los Angeles: Sage. doi:10.4135/9781473905986. |
67 | Verbeek, P.-P. ((2008) ). Morality in design: Design ethics and the morality of technological artifacts. In Philosophy and Design (pp. 91–103). Springer. doi:10.1007/978-1-4020-6591-0_7. |
68 | Viik, T. ((2020) ). Falling in love with robots: A phenomenological study of experiencing technological alterities. Paladyn, Journal of Behavioral Robotics, 11: (1), 52–65. doi:10.1515/pjbr-2020-0005. |
69 | Wilcox, R.V. ((1993) ). Dating data: Miscegenation in “Star trek: The next generation”. Extrapolation, 34: (3), 265. doi:10.3828/extr.1993.34.3.265. |
70 | Wilks, Y. ((2010) ). Close Engagements with Artificial Companions: Key Social, Psychological, Ethical and Design Issues (Vol. 8). John Benjamins Publishing. |
71 | Yamaguchi, H. ((2020) ). “Intimate relationship” with “virtual humans” and the “socialification” of familyship. Paladyn, Journal of Behavioral Robotics, 11: (1), 357–369. doi:10.1515/pjbr-2020-0023. |


