
Electrical machine for remote kissing, and engineering measurement of its remote communication effects, including modified Turing test
Abstract
Various communication systems have been developed to integrate the haptic channel in digital communication. Future directions of such haptic technologies are moving towards realistic virtual reality applications and human–robot social interaction. With the digitisation of touch, robots equipped with touch sensors and actuators can communicate with humans on a more emotional and intimate level, such as sharing a hug or kiss just like humans do. This paper presents the design guideline, implementation and evaluations of a novel haptic kissing machine for smart phones – the Kissenger machine. The key novelties and contributions of the paper are: (i) A novel haptic kissing device for mobile phones, which uses dynamic perpendicular force stimulation to transmit realistic sensations of kissing in order to enhance intimacy and emotional connection of digital communication; (ii) extensive evaluations of the Kissenger machine, including a lab experiment that compares mediated kissing with Kissenger to real kissing, a unique haptic Turing test that involves the first academic study of human–machine kiss, and a field study of the effects of Kissenger on long distance relationships. The first experiment showed that mediated kissing with Kissenger elicited similar ratings for pleasure, arousal and user experience as real kissing. Experiment 2 confirmed our hypothesis that interrogators have a higher chance of winning the Imitation Game (Turing test) when Kissenger is used during the game. Results from experiment 3 showed that long relationship couples who used Kissenger for a week experienced increased relationship satisfaction and decreased perceived stress.
1.Introduction
Various haptic communication systems have been designed and developed by researchers over the years in order to integrate the touch channel in digital communication. These systems aim to enhance physical intimacy during remote interaction between people by stimulating the haptic sensations of hugging (Cheok, 2010; DiSalvo et al., 2003; Mueller et al., 2005; Kuwamura et al., 2013; Tsetserukou, 2010), handshaking (Park et al., 2014; Miyoshi et al., 2015; Avraham et al., 2012), hand holding (Gooch and Watts, 2012; O’Brien and Mueller, 2006; Chang et al., 2002), kissing (Hemmert et al., 2011; Takahashi et al., 2011b; Zhang et al., 2016) and other forms of interpersonal touch (Park et al., 2012; Wang and Quek, 2010; Singhal et al., 2017).
Our every day communication devices, such as mobile phones, present most information through the visual and audio channels. Haptic stimulation is used in the form of vibration that is only able to present somewhat binary information. This type of discriminative touch, which is used for information processing, engages different receptors and neural pathways from affective touch, which is used in social communication and emotional expression (McGlone et al., 2014; van Erp and Toet, 2015). There is an extensive amount of research revealing the important role of affective touch in increasing positive social behaviours (the Midas Touch effect) (Crusco and Wetzel, 1984), building bonds (Light et al., 2005; Hughes et al., 2007) and communicating emotions (Hertenstein et al., 2006) in human interaction. Affective touch also has effects on our physiological measures, indicating a more innate and universal link between haptic stimulation and physical wellbeing. More specifically, intimate contact like stroking, hugging, kissing and hand holding can decrease stress hormones and decrease blood pressure in both adults and infants (Light et al., 2000, 2005; Floyd et al., 2009; Grewen et al., 2003).
In the case where touch is mediated through digital systems where the interaction between partners is remote, similar effects as those of direct physical touch aforementioned can be observed. In a study of the Midas Touch effect in virtual touch condition, a higher percentage of participants displayed helpful behaviour when vibrations were given on their arms compared to no vibration (Haans and IJsselsteijn, 2009). Numerous quantitative and qualitative user studies conducted on telehaptic systems have found that mediated touch using various stimuli including vibration, pressure, friction and warmth can enhance the sense of physical presence and intimacy, elicit positive emotions, and express affections and emotions (Gooch and Watts, 2012; Cheok, 2010; Park et al., 2012; Saadatian et al., 2014; Salminen et al., 2008; Tsetserukou, 2010; Smith and MacLean, 2007; Takahashi et al., 2011a). On the physiological level, there is evidence showing that hugging a human-shaped telepresence medium reduces stress hormones and increases positive feelings for the conversational partner (Sumioka et al., 2013).
It is not hard to identify a gap between research and industrial applications in haptic technologies for communication. Although a plethora of research has provided convincing evidence of the benefits of using touch as a communication channel in remote interaction, and a wide range of design frameworks and prototypes, there are very few commercial solutions available on the market. Among those, the HugShirt11 and Tjacket,22 which was produced by the first author, are examples of commercial wearable garments that can send simulated hugs through the Internet. Other haptic devices aim to augment communication by adding an extra sensory dimension to the touch screen and vibrations of mobile phones. For example, Smartstones Touch33 is a pebble-shaped Bluetooth device that recognises simple touch and gestures, and send them as messages which the users assigned to the gestures. However, most of these devices still use vibration motors to generate tactile sensations on users’ skin, which can hardly reproduce the realistic feelings of a human touch. On the other hand, recent haptic technology implemented in mobile devices is moving towards precise force feedback to touch events rather than the traditional vibration output. Apple’s Taptic Engine found in devices such as Apple Watch and iPhone 7 likely uses Linear Resonant Actuators (LRA) instead of Eccentric Rotating Mass (ERM) vibration motors to give a more precise level of linear force feedback that matches the amount of pressure applied by the user.44
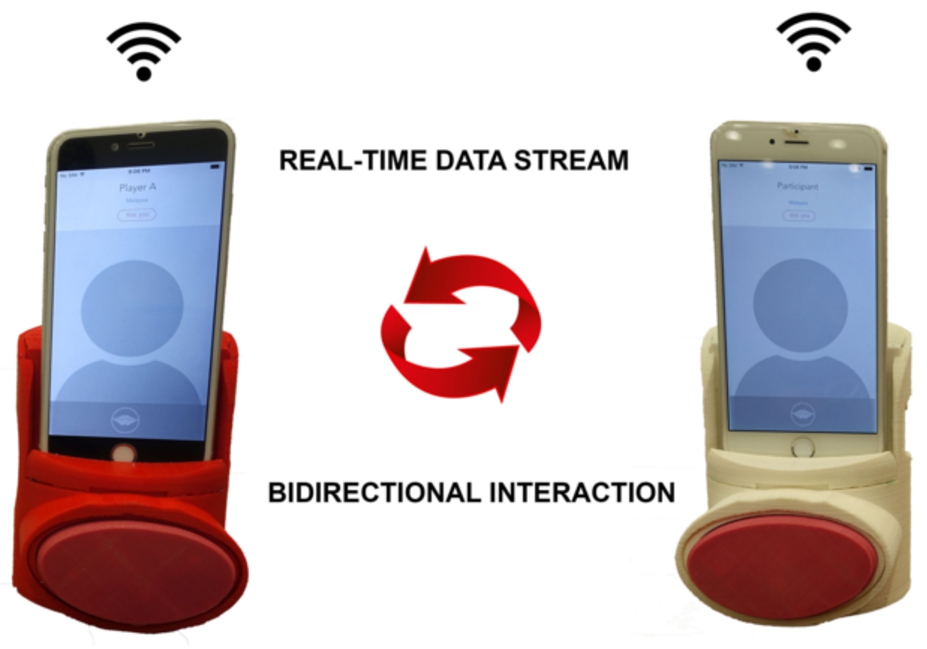
The goal of this paper is to provide a design guideline using off-the-shelf components, detailed implementation and a Turing test evaluation of a haptic kissing device for mobile phones. This Internet kiss messenger, nicknamed the Kissenger machine, can sense accurate lip pressure and transmit haptic sensations of kissing through linear force-feedback when attached to mobile phones. The touch interface consists of a flexible lip surface and an array of force sensors and linear actuators. Figure 1 shows a pair of the Kissenger machines. This research focuses on perpendicular force stimulation on the skin, as it is the most effective and preferable type of stimulation in conveying pressure sensations compared to tangential force and vibrotactile stimulation (Motamedi et al., 2017).
The kissing machine is designed to enhance intimacy and emotional connection in digital communication, allowing families and friends to physically interact with each other over the Internet. One such scenario is depicted in Fig. 2. This device is evolved from previous versions of Kissenger, which is a work conceived by the first author from the idea conceptualisation stage almost ten years ago (Samani et al., 2012). Figure 3 shows two earlier versions of Kissenger developed in our lab, both required to be connected to a computer for data transmission. The device presented in this paper is the first Internet kissing machine that works with mobile phones. Unlike many haptic communication systems that adopt a metaphorical approach of using vibration patterns or warmth to represent physical touch, this system measures the exact pressure applied by the user at various points over a surface area and uses dynamic normal force stimulation to transmit realistic sensations of kissing. We also consider the industrial aspects of force-feedback haptic technologies for communication. Many of the existing research prototypes are unsuitable to be made into consumer products due to their bulkiness, high production cost, and inability to be integrated with everyday communication devices. We recognise that the key to advancing into the “Multisensory Age” of Internet communication is to first integrate high fidelity haptics into all kinds of devices. Taking its size, power consumption and production cost into account, we aim to design and build a haptic device for mobile phones since they are the most commonly used communication tool.
Fig. 1.
The Kissenger machines are designed and developed for mobile phones, that are used in the study.
Lastly, we report the findings of three in-depth experiments of the Kissenger machine. Experiment 1 compared participants’ ratings of pleasure, arousal, and user experience for mediated kissing with those for real kissing in a lab setting. Experiment 2 is a unique embodied Turing test that investigates the effects of haptic kiss communication in an Imitation Game. In experiment 3, we compared the relationship satisfaction and perceived stress levels of long distance couples who used Kissenger for one week to those who did not use Kissenger.
Fig. 2.
Parents and children can share a kiss over the Internet using the kissing devices while having a video chat, even though they are not physically together.

Fig. 3.
Left: first version of Kissenger was a head-shaped device with a realistic pair of lips. Right: second version of Kissenger was designed to look like a cute animal character with soft silicone lips.

This paper presents groundbreaking studies and results that have never been published before in our papers (Zhang and Cheok, 2016; Zhang et al., 2016; Cheok and Kissenger, 2019). In Experiment 2 (the Haptic Imitation Game), we have an improved experimental design and a larger sample size of 100, as compared to 20 in our previous experiment (Zhang et al., 2017). Our new results show that interrogators have a higher chance of winning the Imitation Game when they use the kissing device, which suggests that haptic information transmitted through remote touch plays an important role in the Turing test.
The key novelties and contributions of the paper are highlighted as follows:
Design, implementation and evaluation of a novel haptic kissing device for mobile phones, which uses dynamic normal force stimulation to transmit realistic sensations of kissing in order to enhance intimacy and emotional connection of digital communication.
Analysis of the industrial aspects of force-feedback haptic technologies in communication. Presenting a design framework for building commercialisable high fidelity haptic devices using off-the-shelf components, and capable of integrating with everyday communication devices.
A unique academic study of remote haptic communication, which is an embodied Turing test in the form of the Imitation Game originally proposed by Alan Turing, modified to include the haptic kissing device to study the effects of remote haptic kissing on the winning rate of the players in the game. This is also believed to be the first mutual haptic kissing between humans and machines studied in literature.
Quantitative analysis of a laboratory experiment comparing mediated kissing vs real kissing, as well as a field study involving the use of Kissenger by long distance couples in real life.
2.System design
The haptic kissing communication system consists of three main parts: the hardware devices, the software application and data communication.
2.1.Hardware development
2.1.1.Actuator selection
Actuators are the central elements of a haptic system as they largely determine the power requirements, control principles, aesthetic design and most importantly the haptic quality of the system. The kissing device is required to generate a range of localised normal force stimulation, which simulates kissing sensations by creating palpable pressure and skin indentation on the human lips. The selection criteria that have been considered are the type of actuator, output force, stroke, size, driving voltage and power consumption of the actuators.
Most commercial haptic interfaces for mobile devices provide global or localised vibrotactile feedback. Eccentric Rotating Mass (ERM) vibration motors are typically used in mobile phones due to their low power consumption, compact size and low cost. More recently, Linear Resonant Actuators (LRA) replaced the ERM motors in some devices to produce better haptic effects. Compared to ERM motors, LRA has 50% less power consumption, twice the output force, and faster response and braking time. LRA is also able to produce an impression of linear force-feedback as it vibrates vertically in a single axis. Nevertheless, LRA does not give positional displacements and the output force is insufficient to convey realistic lip pressure.
Linear motions can be achieved by converting rotary electric motors using linear components such as toothed belts, pulleys, lead screws or ball screws or other mechanical converters. There are also self-contained linear actuators that provide direct linear motion, but they typically have a larger footprint and not suitable for applications in which size is a main issue. Linear stepper motors are good for precise positioning systems, and are available in captive, non-captive and external linear configurations (Kerk). A captive linear actuator is the most suitable for the kissing device as it has a compact form factor with a built in mechanism that prevents the rotation of the shaft, allowing it to extend and contract linearly without any external elements.
Several other types of actuators such as piezoelectric actuators, pneumatic actuators and shape memory alloy (SMA) actuators are also some popular choices for linear motion applications. Piezoelectric or ultrasonic actuators come in miniature packages, often used in tactile display systems or Braille devices (Kyung and Lee, 2009; Jang et al., 2016). They benefit from high precision, fast response, low power consumption and small footprint, but they typically have short strokes and low output force, and they require high driving voltage in the range of 50 V–200 V, hence they are not suitable for battery powered devices.
Pneumatic cylinders can generate linear motion with high speed and force with low initial costs. However, these actuators can only travel the full stroke lengths and it is difficult to control precise positions. They also require additional valves and air compressors to operate, making the whole system bulky and noisy overall.
SMA actuators have the advantages of being flexible, lightweight, noiseless and low power consumption. They are essentially a piece of wire with shape memory property, and are able to generate linear motions by changing the temperature of the shape memory element. This can be achieved by controlling the current that flows through the wire. An example of a commercial SMA actuator is the Flexinol wire,55 which expands and contracts like muscles with current. SMA actuators are used in haptic displays with pin arrays such as Lumen (Poupyrev et al., 2004). Users can touch and interact with the haptic display that consists of an array of finger-sized, cylindrical pins pushed up and down by SMA wires. Due to the properties of SMA, the wires can only generate two different positions, and have a slow de-actuation response as the material takes time for cooling. Another drawback is that SMA actuators are unable to generate enough output force, hence unsuitable for our system.
Table 1
A comparison chart of commercially available actuators for generating linear force feedback
| Actuator type | Stimulation | Advantages | Disadvantages | Off-the-shelf option |
| Linear Resonant Actuator (LRA) | Linear vibrotactile | ∙ Low cost and very low power ∙ Low drive voltage, typically 2 V (RMS) ∙ Small size, available in coin shape typically 8–10 mm diameters | ∙ Does not generate a wide range of linear force-feedback, no positional displacement ∙ Low output force but higher than ERM vibration motors | 8 mm Linear Resonant Actuator by Precision Microdrives, 1.8 V, 0.095 W, 9 USDa |
| Servo motor | Linear and rotary | ∙ Closed loop positioning ∙ Suitable for high speed and heavy loads | ∙ Typically more expensive than stepper motors | PQ12-R Micro Linear Servos for RC & Arduino by Actuonix Motion Devices, 21 mm × 36 mm, 15 g, 6 V, 3.3 W, stroke length 20 mm, max output force 50 N, 70 USDb |
| Stepper motor | Linear and rotary | ∙ Open-loop positioning, no encoder required ∙ Holds its position without overheating ∙ Suitable for low speed, light and dynamic loads | ∙ No positional feedback if load exceeds output torque | 15000 Series Can-stack Linear Actuator (Captive) by HaydonKerk, 15 mm × 40 mm, 28 g, 5 V, 1.6 W, stroke length 12.7 mm, max output force 32 N, 80 USDc |
| Piezoelectric | Linear and rotary | ∙ High precision ∙ Fast response time and high speed ∙ Very low power | ∙ High drive voltage, typically 50–200 V ∙ Short stroke and output force ∙ Expensive | N-412 Fast Linear Actuator with PIShift Piezomotor by PI, 15 mm × 58 mm, 25 g, 48 V, stroke length 13 mm, max output 10 Nd |
| Pneumatic | Linear | ∙ Low initial cost ∙ High force and speed ∙ Holds its position without additional power | ∙ No precise position control except at end of strokes ∙ Requires valve and air compressor – bulky, noisy setup ∙ Requires regular maintenance | Double Action Pneumatic Pin Cylinder by SMC, 16 mm × 48 mm, stroke 15 mm, 21 g, 35 USDe |
| Shape memory alloy | Linear | ∙ Flexible and very compact ∙ No complicated driving circuit required | ∙ Low output force ∙ Difficult to control precise position ∙ Slow response time | FLEXINOL Actuator Wiref |
a 8 mm Linear Resonant Actuator – 3 mm Type by Precision Microdrives. https://www.precisionmicrodrives.com/product/c08-001-8mm-linear-resonant-actuator-3mm-type.
b PQ12-R Micro Linear Servos for RC & Arduino by Actuonix Motion Devices. https://www.actuonix.com/Actuonix-PQ12-R-micro-linear-servos-for-RC-p/pq12-r.htm.
c Can-stack Stepper Motor Linear Actuators by HaydonKerk. http://www.haydonkerk.com/LinearActuatorProducts/StepperMotorLinearActuators/LinearActuatorsCanstack/tabid/85/Default.aspx.
d N-412 Fast Linear Actuator with PIShift Piezomotor by PI. http://www.pi-usa.us/products/PDF_Data/N412_Miniature_Piezo_Motor_Actuator.pdf.
e SMC Double Action Pneumatic Pin Cylinder, CDJP2B6-15D. http://uk.rs-online.com/web/p/pneumatic-pin-cylinders/0547556/.
f FLEXINOL Actuator Wire. http://www.dynalloy.com/flexinol.php.
Table 1 shows a comparison of the different types of linear actuators mentioned above. It lists the advantages and disadvantages of each actuator, and provides an off-the-shelf option which is suitable to be integrated in small size haptic communication systems that require linear force-feedback stimulation. For applications in general haptic systems, Haus et al. provides an aid for actuator selection based on the system dynamics, which includes a wider range of actuator principles (Haus et al., 2014).
2.1.2.Sensor selection
This system requires force sensors to measure the force applied by the users’ lips to the device. Load cells, strain gauges, piezoresistive force sensors and piezoelectric force sensors are some types of force sensors to choose from. The hardware design, accuracy, range and resolution need to be considered in choosing the type of sensors to use in the system. A strain gauge measures force by converting the deformation of a material caused by applied force to electrical output. It is highly accurate but requires complicated conditioning circuits and has to be mounted on some flexible mechanical structure that converts force to strain, usually a cantilever beam. A load cell is a readily available component that comprises a strain gauge mounted on a bending beam. However it is generally bulky and not suitable for OEM/design in applications (Tekscan).
A piezoelectric force sensor is made of a piezoelectric ceramic disk which generates a voltage when subjected to force or strain. Piezoelectric sensors are suitable for measuring highly dynamic forces like oscillations or vibrations due to their fast response. They are cost efficient and long lasting, but on the other hand they are also sensitive to noise, light and heat, making them difficult to control.
Piezoresistive force sensors, also known as force sensing resistors (FSR), have become increasingly common and are found in many applications. The resistance of a FSR varies linearly with the force applied to its sensing area. To be more precise, a FSR measures pressure as the output depends on the surface area to which the force is applied. These sensors are made from a special piezoresistive material sandwiched between two pieces of flexible plastic sheets with printed conductors on each inner half (Tekscan). The advantages of FSRs are that they are flexible, thin, light, inexpensive, require minimal driving circuitry and have higher resolution than strain gauges. They are very sensitive to human touch and have a customizable measuring force range by changing the value of the feedback resistor used in the driving circuit. FSRs come readily available in various lengths, sensing areas or custom designs that include multiple sensing elements, making them suitable for many types of haptic applications.
2.1.3.Control structure
Force-feedback control schemes can be classified into two types, admittance-control and impedance-control (Hatzfeld, 2014). Impedance-controlled systems take motion as input and produce force output. Admittance-controlled systems take force as input and output as motions, defined by kinematic measures such as position, velocity and acceleration. Admittance control is typically used in cooperative teleoperation systems and haptic displays such as the FEELEX system (Iwata et al., 2001), which uses pin arrays to simulate spatial tactile patterns and surface textures or shapes of virtual objects through force-feedback. In this system, surface deformation is generated by a 6 × 6 linear actuator array underneath a piece of rubber sponge. Palpable haptic sensations are produced by the up and down motions of the linear actuators. Two strain gauges are placed on top of each actuator to measure the force applied by the user’s hand.
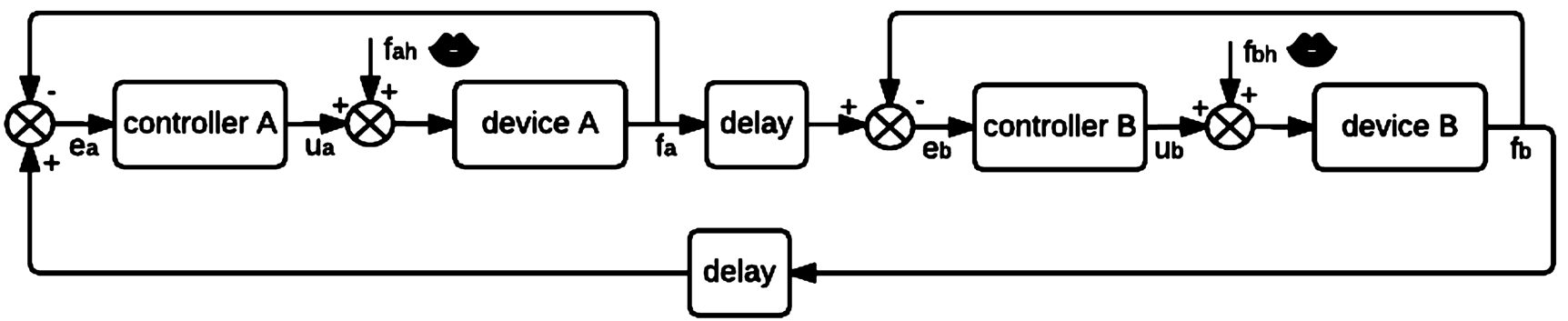
Kissenger is a bilateral telehaptic system based on admittance control, as it measures force from users’ lips and controls the actuator position. Different from conventional master-slave systems in which one side of the system is passive, this system is completely symmetrical as both sides are masters and slaves. The objective of the controller in each device is to synchronise the contact force between the user and the haptic device on both sides of the system at any given time. In a perfectly transparent bilateral control system, the law of action and reaction must be realized, hence the net force should be zero. The controller objective can be expressed as follows:
Each actuator changes its position to compensate the difference between
Figure 4 shows a block diagram of the bilateral force controller. The control system is symmetrical as both users are supplying active inputs to the system. The constants are tuned depending on the linear properties of the force sensor derived from calibration, the maximum stroke length of the linear actuator as well as the perceived stiffness of the haptic interface. Upper and lower limits of the actuator position are imposed by the stroke length of the actuator.
Fig. 4.
Control block diagram of the bilateral force feedback controller of the system.
2.2.Software application
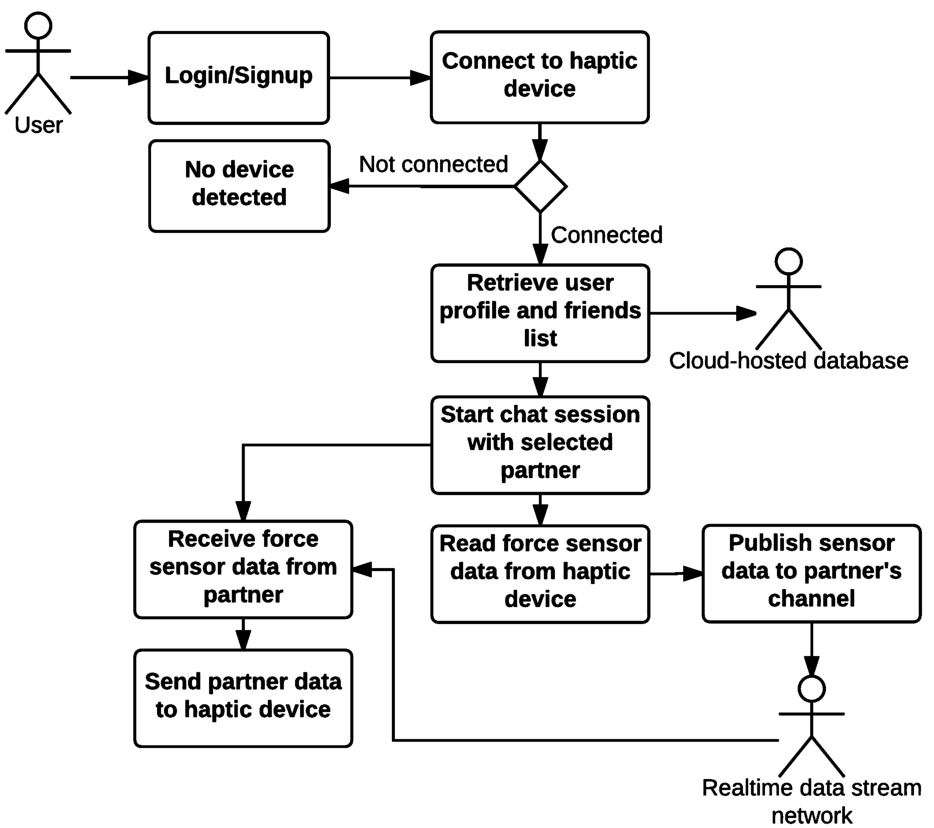
Fig. 5.
The activity diagram of a typical user session with the haptic kissing device for the mobile application.
Developing haptic devices for mobile phones not only expands the haptic channel for mobile communication, but also enables the devices to interface with other mobile applications, and access the hardware and software functions of the mobile phone. For example, the haptic device can transmit and receive real-time data through the Internet by connecting to the mobile phone, saving the need of an inbuilt Wi-Fi module. Users could also interact with each other through video or audio calls using their mobile phones while using the haptic device, making it a multisensory Internet communication experience. By interfacing with other social applications such as Skype, Facebook or Whatsapp, touch communication with the haptic device could be spread among a vast social network, not just between two individuals.
A mobile application is required for connecting the haptic device to a mobile phone, and transmitting data through the Internet in real-time. Communication between the device and mobile phone can be established wirelessly, using Bluetooth Low Energy (BLE) for example, or wired through USB or audio cable. BLE connection requires a BLE module embedded in the haptic device, increasing the production cost of the device and power consumption of the phone. With the wired option, the gadget can be designed as an attachment to the mobile phone just like the Kissenger device. Real-time sensor data is transmitted between the haptic device and mobile application, which then transmits it over the communication network to other users. Figure 5 shows the activity diagram of a typical user session with the haptic kissing device for the mobile application. Latency, bandwidth and packet losses should be considered in both stages of the data transmission process.
2.3.Network architecture
The two fundamental network architectures for remote haptic systems are the client-server architecture, and the distributed peer-to-peer architecture. Other hybrid models have also been proposed but not widely used (Marsh et al., 2006). The client-server model has the advantage of maintaining high consistency among all client devices, as all haptic simulations and force calculations are processed in a centralised server. However this approach lacks in responsiveness, increasing the latency and instabilities in haptic interactions between clients. On the other hand, the peer-to-peer architecture provides high responsiveness, as each client device has a local controller that renders the haptic stimulation, updates and processes data to/from other peers (El Saddik et al., 2011). This architecture is most commonly used in collaborative haptic systems due to its responsiveness and scalability.
3.System implementation
A pair of prototypes of the Kissenger device was designed and implemented for iPhone. The hardware device consists of three sets of captive linear stepper motors (Haydon Kerk 19000 series) and force sensor resistors (FSR400 5 mm) evenly distributed under a soft and flexible lip-like surface. A low voltage stepper motor driver (Texas Instrument DRV8834) is used to drive each motor in microstepping mode. An Arduino Pro Mini microcontroller is embedded in the device for force control. A RGB LED is also placed under the lip surface to give a visual feedback to the kiss interaction. Users can also change colours on their partner’s device to convey their emotions and feelings. The device was designed to attach to the mobile phone as a haptic telepresence device, such that users could see the face of their partner through the mobile application while kissing on the lip-like haptic interface in real-time. The picture on the left of Fig. 6 shows a pair of Kissenger devices connected to iPhone 6 Plus running the Kissenger mobile application, and the picture on the right shows the internal mechanism of the lip sensing area.
Fig. 6.
Left: a pair of prototypes of the Kissenger device was designed and implemented with iPhone 6 Plus. Right: the force sensors and linear actuators beneath the fleaxible lip cover.
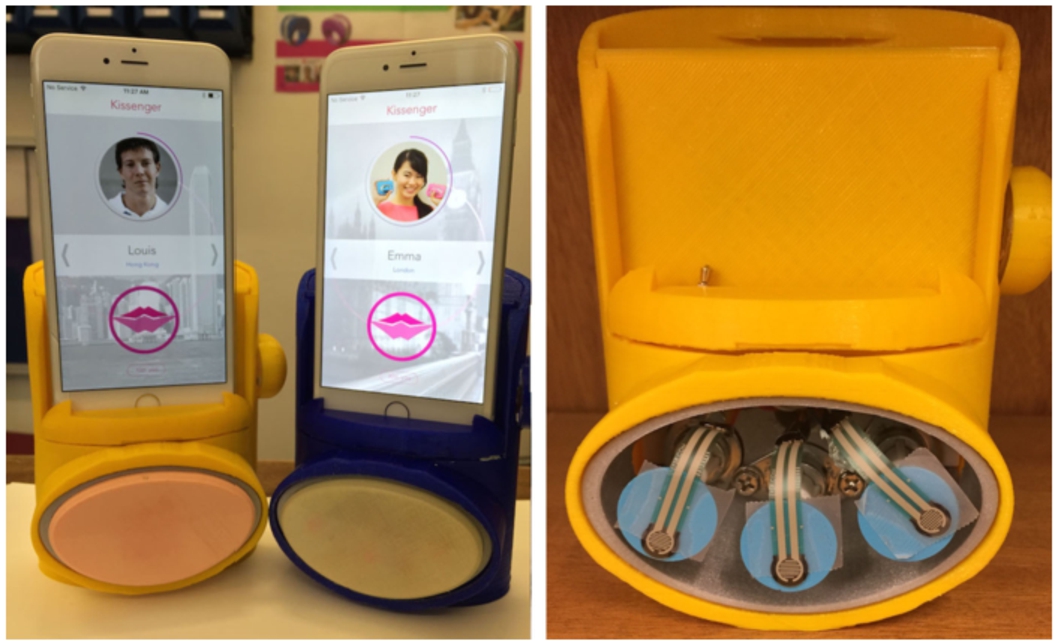
Proper mounting techniques ensure an accurate and repeatable measurement using force sensitive resistors. The sensing area should be mounted on a flat solid surface without bending, and the applied force should distribute evenly over the entire sensing area (Tekscan). A circular support is attached on top of the shaft of the linear stepper motor for the sensing area of the FSR to rest on. Additionally, a thin circular puck about the same size as the sensing area is placed on top of the sensing area so that the force exerted on the lip cover can be better registered by the sensor.
The microcontroller in the device reads the force data measured by the FSRs and sends it to iPhone via a FSK modem on a polling basis. The data is modulated to 4900 Hz for a low bit and 7350 Hz for a high bit and sent to the connected mobile phone through the microphone channel of the audio line. Similarly, force data received from the partner’s device is also transmitted from the iPhone to the microcontroller via a FSK modem for processing. The hardware device is powered by a 6 V DC power supply. This low input voltage easily allows the device to be battery powered.
A Kissenger mobile application for iOS was developed for users to connect and interact with the hardware device when plugged into the phone. The application implements real-time data transmission between users using the Pubnub data streaming service. A subscribe-publish model is used for real-time data streaming. Each client device has its own dedicated channel with a unique publish and subscribe key. A client always subscribes to its own channel to receive the messages sent to it. When two remote clients establish a connection through the application, they exchange the publish key of their designated channels and each client publishes real-time data to the partner’s channel. The subscribing client always listens to its channel and receives only the messages published onto the channel. Some key features of the mobile application include video chat, changing the LED colour of a partner’s device and connection to social networks. The application allows users to remotely kiss their loved ones over the Internet during a video chat, creating a more intense sense of telepresence.
4.Experiment one: Real kissing vs mediated kissing
An experiment was carried out to assess the effectiveness of the Kissenger machine by comparing mediated kissing to real kissing. The objective of the experiment was to qualitatively measure various aspects of human kissing and mediated kissing carried out through a questionnaire based on the semantic differential method. By comparing participants’ ratings for their kissing experience in the mediated and non-mediated conditions, we examined whether the Kissenger machine could effectively simulate physical kissing over a distance.
A semantic differential questionnaire was devised for assessing participants’ affective responses to the two different modes of kissing. The semantic differential (SD) scale is commonly used to measure affective responses and attitudes to events, objects or concepts. It is typically represented on a 7-point rating scale with bipolar adjectives, such as ‘unhappy/happy’ and ‘unpleasant/pleasant’, at each end of the scale. The word pairs used in the questionnaire administered in our experiment were extracted from two existing SD scales – the 18-item Semantic Differential Scale by Mehrabian and Russell (Mehrabian and Russell, 1974), which measures emotional responses on the dimensions of pleasure, arousal, and dominance, and Hassenzahl’s AttrakDiff questionnaire (Hassenzahl et al., 2003), which assesses the hedonic and pragmatic qualities of user experience. The questionnaire in this experiment contained 12 pairs of bipolar adjectives that measure the emotional dimensions of pleasure and arousal, and the self-evaluated experience of the kiss during the experiment. Items included ‘annoyed/pleased’, ‘unaroused/aroused’, ‘technical/human’, etc. Each item was rated on a 7-point scale (
4.1.Participants
50 consenting couples, ages ranged from 19 to 57, were recruited to participate in the study. 18 couples were married and 32 couples were in a romantic relationship. The couples were randomly assigned to two groups, experimental group and control group. Each group consisted of 25 couples.
4.2.Experimental procedures
The control group participated in the real-kiss (non-mediated) condition, where participants kissed their partners directly on the lips. After an initial briefing and signing the consent forms, each couple was led to a completely dark room with no light source. They were given one minute alone in the room to kiss each other by touching their lips with their mouths closed. Participants were brought out of the dark room at the end of one minute, and were asked to rate the emotional responses and experience of their kiss by completing the semantic differential questionnaire individually. The experiment took place in a dark room as we wanted participants to focus on touch sensations rather than visuals during their kiss. Participants were instructed to close their lips while kissing so that the real kiss and the mediated kiss were carried out through the transmission of lip pressure only.
Couples in the experimental group were assigned to participate in mediated kissing using the Kissenger device. A pair of Kissenger devices was configured to connect to each other before the experiment. During the initial briefing, the experimenters demonstrated to the participants how to use the kissing device to kiss someone remotely. Each participant was then given a kissing device to familiarise themselves with it and to try out with their partner with the help of the experimenters. After ensuring that the couple could correctly use the kissing device to kiss each other, each person was led to a separate dark room with the same conditions, and was asked to use the device to kiss their partner in the other room for one minute. At the end of the experiment, participants completed the same questionnaire to evaluate their kissing experience and emotional responses. Participants in both groups had complete privacy during their kiss, and they were not recorded or observed in any way by the experimenters.
4.3.Results and discussion
The means and standard deviations of ratings on the semantic differential questionnaire were calculated for each of the 12 attributes for both groups. Aggregated values were also obtained for the 3 dimensions assessed by the questionnaire – pleasure, arousal and user experience. A Mann–Whitney U test for independent random sampling (
Figure 7 demonstrates the mean values of each semantic differential descriptor calculated from the results of the questionnaire completed by participants in the experimental group and the control group. Statistical analysis did not reveal any significant difference between the real kiss and mediated kiss conditions for ratings of pleasure (
Fig. 7.
Calculated mean values of each semantic differential descriptor for real kissing and mediated kissing conditions.
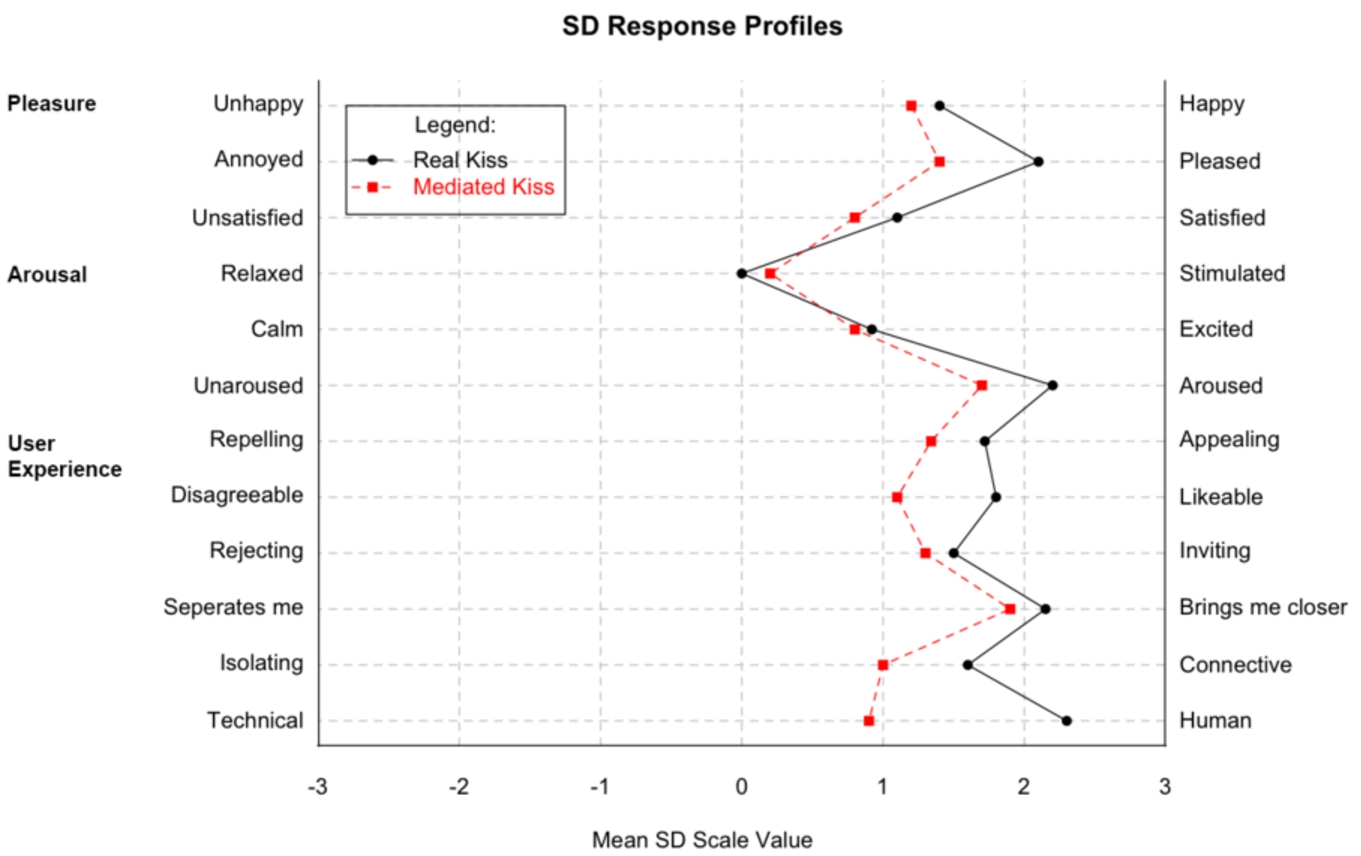
When comparing the mean values, the real kiss group gave higher ratings on all three dimensions than the mediated kiss group in general, although this difference is not statistically significant. For most bipolar descriptors, the differences of the mean values between two conditions are within 10%. This shows that the affect elicited by the Kissenger machine is very similar to that elicited by human kissing. On the ‘technical/human’ spectrum, the real-kiss group scored a relatively higher mean (
5.Experiment two: The haptic Imitation Game
The purpose of the study is to investigate whether the kissing device affects the odds of the interrogator winning the Imitation Game when both interlocutors are humans, and when one of them is a chatbot. Alan Turing depicted the Imitation Game in 1950 as a way to examine whether machines have the ability to think (Turing, 1950). The game led its way to the Turing test, which has been widely used as a standardised test for machine intelligence.
This game consists of three players: A is a male, B is a female, and C is the interrogator. Player C (the interrogator) asks questions from A and B (henceforth referred to as expert players) by typing on a computer in order to determine which of them is female, as C is unable to see or hear the expert players. Both expert players would attempt to convince Player C that they are female during the conversation. Player C wins the game if he/she can correctly identify the female player.
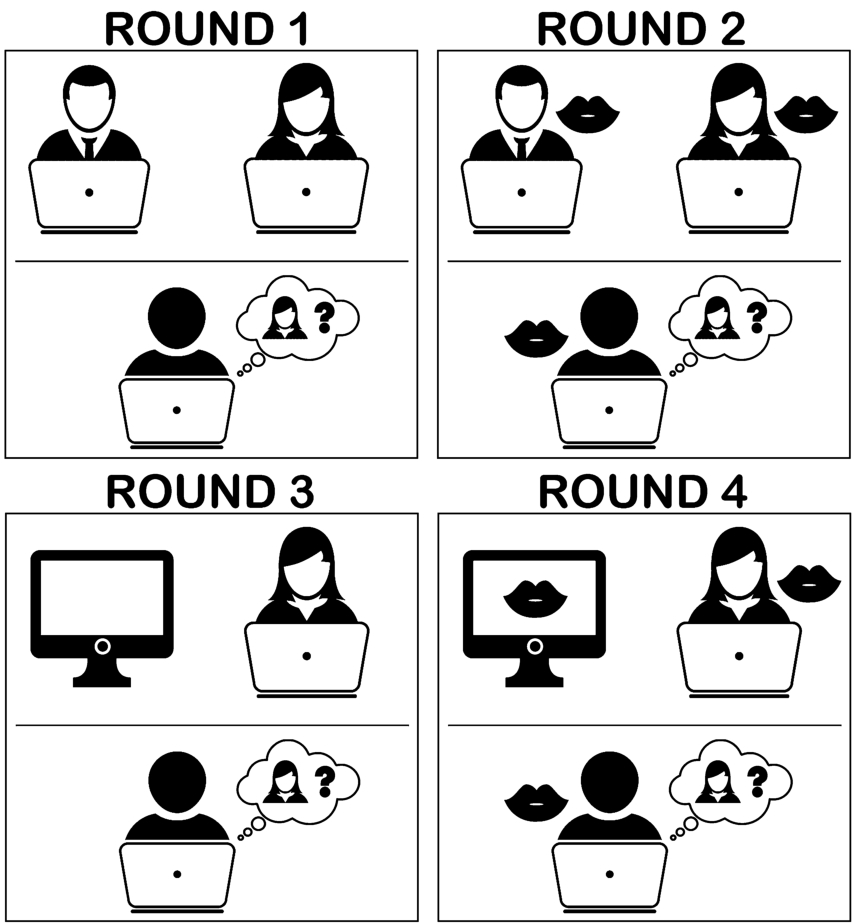
In this study, we followed the original Imitation Game described by Alan Turing in his paper (Turing, 1950) as closely as possible, with the exception of introducing a haptic element by using the Kissenger machine. Participants played the role of interrogators in the experiment, and their objective was to ask the expert players questions in order to identify the female player. The experiment consisted of four rounds of the game, and the duration of each round was 5 minutes. During each round, participants chatted with two trained expert players separately in two online chat rooms. In two of the four rounds, participants chatted with two humans with and without the kissing device. In the remaining two rounds, a chatbot replaced the male player as the expert player, and participants played the game with a chatbot and a human with and without kissing. Figure 8 illustrates the four different conditions of the study.
In this study, participants are considered to have won the game if they had correctly identified the female player. We hypothesized that participants would be more likely to win the Imitation Game when they use the kissing machine during the conversation than when no kiss interaction is involved. We expect similar effects of the kissing machine for both human and chatbot expert players.
Fig. 8.
The experiment setup of the modified Imitation Game with haptic kissing.
5.1.Participants
100 undergraduate students, aged 18–25, participated in the experiment after signing the informed consent form. 57 participants were male and 43 of them were female. As our experiment was conducted in a Muslim country and the majority of the participants were Muslims, we were required to be concerned about Muslim religious rules. No participants expressed religious concerns to using the kissing device to remotely kiss an unknown person of either gender.
5.2.Chatbot
The chatbot adopts the open AIML architecture and the knowledge base from the Artificial Intelligence Entity, or ALICE. It is built on an existing implementation through Program AB, and a Java programming language interpreter for AIML, an XML-compliant language for authoring chatbots. We modified and extended the categories in ALICE by making some of the responses more humanlike, and creating new categories targeted at the Imitation Game. For example, we added questions such as “What is your favourite fashion brand?”, and “Do you like shopping?”, to which the chatbot would answer “Simple and classy” and “Of course” etc. We aim to provide a natural open-domain conversation without limiting the topics that can be discussed.
Although the chatbot replaces the role of the male player in the game, its goal is to convince the interrogator that it is female. Two female personae are built by assigning gender-specific attributes, which include name: Eva, firstname: Eva, middlename: Tay, lastname: Lee, fullname: Eva Tay Lee, gender: female, boyfriend: Olando, job: Marketing executive, skills: cooking, writing and skiing etc. As the identities of the expert players should be different in each round, the attributes and preferences of the chatbot are different in round 3 and round 4. Furthermore, a time delay proportional to the length of the response is added before displaying each reply to the human participants in order to simulate the typing time required by humans.
The chatbot is deployed as a Representational State Transfer (RESTFUL) web service and through a web-based chat interface that we developed for the users to converse with it. The transcript below shows an example of a chat session between a participant and the chatbot.
| Human: | hey |
| Chatbot: | Hi! It’s delightful to chat with you. |
| Human: | how are you? |
| Chatbot: | Feeling really joyful today. |
| Human: | are you ready for a kiss?? |
| Chatbot: | Sure |
| Chatbot: | Say Ok when you are ready |
| Human: | ok |
| Chatbot: | Hmmmmmm…i feel the sensation |
| Human: | sure? |
| Chatbot: | Oh. |
| Human: | do you like shopping?? |
| Chatbot: | I like shopping of course |
| Human: | ok |
| Chatbot: | Hmm. |
5.3.Experimental procedure
The expert players and the chatbot were assigned the roles of Player A and Player B in every round. The assignments of Player A and Player B are as follows: round 1: Player A was the male and Player B was the female; round 2: Player A was the female and Player B was the male; round 3 and 4: Player A was the chatbot and Player B was the female. The kissing machine was used in round 2 and round 4 only. The role assignments for all 4 rounds are summarised in Table 2.
Participants were brought to a quiet lab room and asked to sit in front of a laptop, which showed two online chat rooms side by side. The names of the expert players displayed in the chat rooms were “Player A” and “Player B” respectively. The experimenter explained the experimental procedure to each participant before the beginning of the experiment, and asked the participant to fill in the demographic questions in the questionnaire. Participants were instructed to initiate the chats with both expert players and ask them questions to identify their gender. The conversations were open-domain, i.e. participants were not restricted to the type of questions or topics they could discuss. At the beginning of each round, the experimenter started a timer for 5 minutes and left the participant alone in the room. When the time was up, the experimenter informed the participant to stop the chat and write down the answer for who the female player is for that round in the questionnaire. No time limit was given for answering the questionnaire.
Table 2
A summary of the role assignments for the 4 rounds of Imitation Game
| Player A | Player B | |
| Round 1 | Male | Female |
| Round 2 | Female + Kissing device | Male + Kissing device |
| Round 3 | Chatbot | Female |
| Round 4 | Chatbot + Kissing device | Female + Kissing device |
Before the start of round 2 and round 4, participants were presented with a pair of kissing machines each connected to an iPhone 6 Plus. Each device was connected to one of the expert players’ kissing device through the mobile application developed. The mobile application displayed “Player A” or “Player B” depending on which player it was connected to. The experimenter explained the functions of the kissing device and demonstrated how to use it to remotely kiss the expert players. Participants were allowed to try out the device to ensure that they could use it themselves. The lip sensing surface of the kissing device was cleaned and disinfected with isopropyl alcohol before every use. Participants were told to initiate the kiss in the chat with each expert player in whatever way they felt comfortable, at least once during the round. Figure 9 shows a participant using the haptic kissing device during the game.
In order to minimize the learning and inference effects across conditions, we randomized the order of the rounds for each participant. Expert players were also instructed to adopt a different character and answering style in each round with the same participant. Similarly, the participants were also told that they were chatting with two different human players in each round. In round 3 and round 4, the involvement of a chatbot was not made known to the participants.
Fig. 9.
A participant giving a kiss to a player using the haptic kissing device during the Imitation Game experiment.

5.4.Results and discussions
Fig. 10.
Number of participants who made the correct guess in each round of the game.
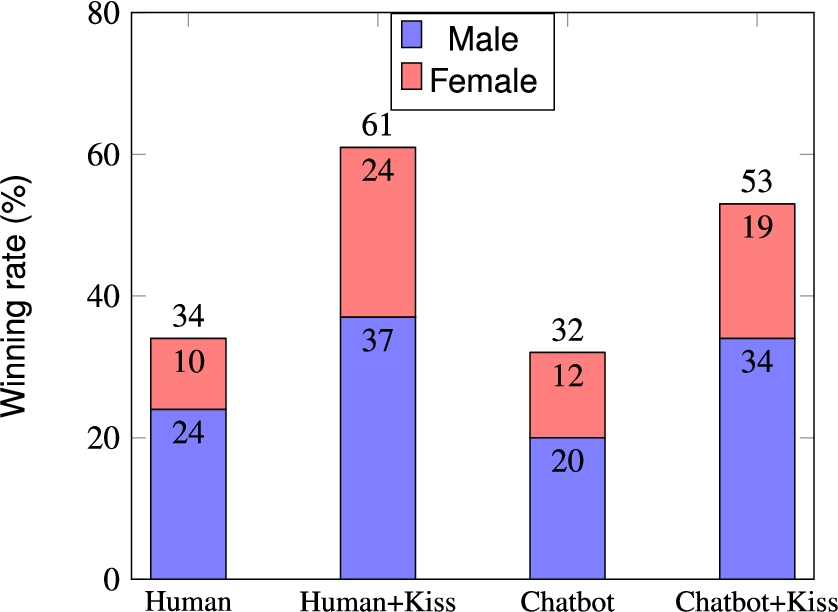
When both expert players are humans, 34 participants (24 males, 10 females) correctly identified the female player without the kissing device, and 61 participants (37 males, 24 females) had the correct answer with the kissing device. Please see Fig. 10. According to our hypothesis, we expect the winning odds of participants who used the kissing machine to be higher than those who did not use the kissing device. A binary logistic regression model was used to predict the odds, which is expressed as:
Statistics showed that the use of the kissing device had a significant effect on the odds of a participant making the correct guess. Participants who used the kissing machine during the conversation with both human expert players were 3.11 times (Odds ratio = 3.11) more likely to win the game than when they did not use the kissing machine (
When the chatbot acted as the male expert player, 32 participants (20 males, 12 females) successfully identified the female player without the kissing device, and 53 participants (34 males, 19 females) won the game with the kissing device. Comparing the results between the kiss and no-kiss conditions, it was found that the kissing device also had a significant effect on the winning odds of the interrogators. Statistics showed that participants who used the kissing device during the conversation were 2.42 times (Odds ratio = 2.42) more likely to win the game than when they did not use the device (
The results of the study supported our hypothesis that interrogators have a higher chance of winning the Imitation Game when they use the kissing device than when no kiss interaction is involved. This suggests that other than language and reasoning, haptic information transmitted through remote touch also plays an important role in the Turing test. The original Turing test measures machine intelligence based on the natural language ability of the machine alone. Rapid advances and higher requirements in AI and Robotics research are proving it difficult for the Turing test to be a sufficient benchmark to measure all aspects of intelligence. In the field of human–robot intimate relationships in particular, physical embodiment and touch interaction are some of the key elements that determine the perceived intelligence of a robot partner. A new form of Turing test is required to measure a machine’s ability to perceive the physical environment, to perform and to understand the physical actions of humans (Ortiz, 2016).
6.Experiment three: Effects on long distance relationships
In the last study, we aim to explore the effects of Kissenger on the relationship satisfaction and psychological well-being of couples in long distance relationships over a period of one week.
Previous studies suggest that kissing has positive physiological and psychological health effects on individuals. In a 6 week trial involving 26 married or cohabiting couples conducted by Floyd et al. (2009), results showed that increasing the frequency of romantic kissing between couples decreases blood cholesterol and perceived stress, and increases the perceived relationship satisfaction. These effects were not observed in the control group. Based on the previous experimental findings of real kissing, we hypothesized that mediated kissing with the Kissenger device reduces perceived stress, and increases relationship satisfaction in long distance romantic relationships.
We used two questionnaire measures to assess the relationship satisfaction and perceived stress of participants. Relationship satisfaction was measured with the 7-item Relationship Assessment Scale (Hendrick, 1988), which includes questions such as “How well does your partner meet your needs?”, and “How many problems are there in your relationship?” Perceived stress was measured with the 10-item Perceived Stress Scale (PSS) (Cohen et al., 1983). Questions asked participants how often they had dealt with anger, irritations, nervousness, etc. We rephrased the questions by asking participants to reflect on “the past day”, instead of “the past month” as stated in the original questionnaire.
6.1.Participants
Potential participants were invited to complete an online prescreening questionnaire to determine their eligibility for the study. To be considered eligible, participants had to (1) be 18 years and above; (2) be in a romantic relationship for at least 2 months; (3) see their partner for 3 times a month or less; (4) report no history of diagnosis of depression or other mood-related disorders; (5) have access to the Internet and mobile phones.
50 eligible couples in a long distance relationship were recruited to participate in this study. The couples were randomly assigned to experimental group and control group, each group consisted of 25 couples.
6.2.Experimental procedure
Before the one week trial started, an online questionnaire was sent to participants in both experimental group and control group to assess their pretest relationship satisfaction and perceived stress level. The two-part questionnaire consisted of 17 items measured on a 5-point Likert scale. A higher score on the scale indicates higher relationship satisfaction, or higher perceived stress.
A Kissenger device along with a detailed instruction booklet were delivered to each participant in the experimental group before the start of the trial. The experimenter arranged a video call session with each couple to demonstrate the use of the Kissenger device, and to make sure the couple could correctly operate the Kissenger devices.
During the one week trial, participants were given instructions to communicate with their partner every day using all of these three methods: 10 minutes video call, 10 minutes phone call, and 10 text messages. Couples in the experimental group were instructed to use the Kissenger during their communication everyday, whereas couples in the control group communicated without using Kissenger. The same 17-item online questionnaire was sent to each participant by email to be completed by the end of each day.
At the end of the trial, a short interview was conducted with each couple in the experimental group to gather feedback on their experience of using Kissenger and how it had affected their feelings and relationships with their partner. Interview questions included: “How has using Kissenger changed your relationship with your partner?”, “Do you think Kissenger has improved your physical intimacy with your partner?”, etc.
6.3.Results and discussions
Fig. 11.
Means and standard deviations of couples’ relationship satisfaction, and perceived stress measured on a 5-point scale during the one week trial.
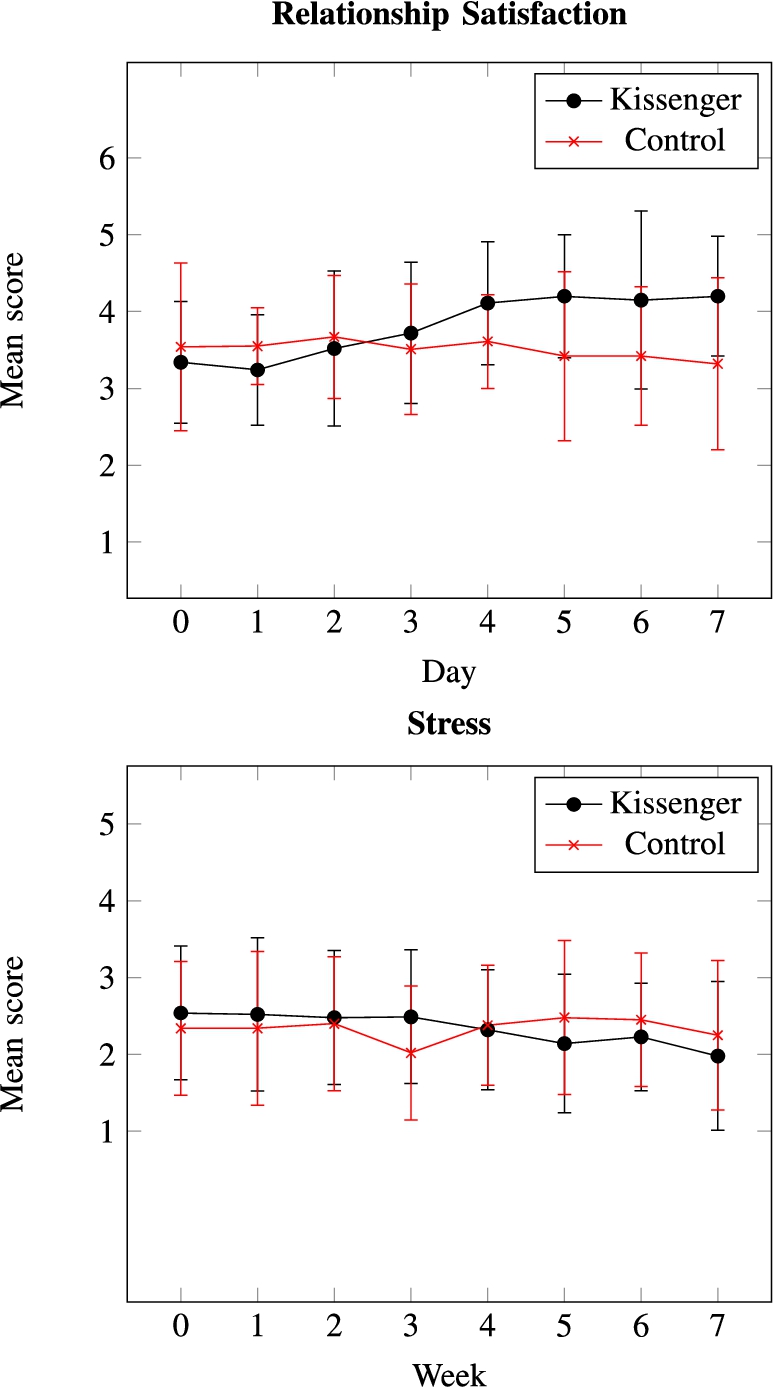
Tests on the outcome variables, relationship satisfaction and perceived stress, were conducted using ANCOVA with one-tailed pairwise mean comparisons by condition. Figure 11 reports the daily means and standard deviations for both outcome variables during the one week trial. Day 0 values represent the pretest results obtained from participants before the trial. ANOVA tests confirmed the assumption that Day 0 relationship satisfaction and stress values were not significantly different between the experimental and control groups.
Visual analysis of results for relationship satisfaction revealed that the experimental group experienced a steady increase from Day 1 to Day 4, and remained roughly constant until the end of the trial. The control group did not show any significant increase or decrease throughout the week. We examined the effects of the Kissenger device on relationship satisfaction using ANCOVA with condition (experimental vs. control) as the fixed factor, Day 0 relationship satisfaction as the covariate, and Day 7 relationship satisfaction as the dependent measure. ANCOVA revealed a significant effect for condition (
Similarly, we analysed the effects of Kissenger on perceived stress using ANCOVA with condition as the fixed factor, Day 0 stress as the covariate, and Day 7 stress as the dependent measure. ANCOVA revealed a significant effect for condition (
The results confirmed our hypothesis that couples in a long relationship experience increased relationship satisfaction and reduced stress when they engage in mediated kissing using the Kissenger device. This shows that remote mediated kissing has similar benefits on people’s psychological well-being as physical kissing.
7.Conclusion
In this paper, we identified a gap between research and industrial applications in haptic technologies for digital communication, and provided a design guideline for integrating interactive force-feedback haptic interfaces in communication devices such as mobile phones. Following such design considerations, a novel haptic kissing device that senses lip pressure and uses dynamic normal force stimulation to transmit realistic sensations of kissing was implemented for mobile phones.
We conducted three experiments with the Kissenger machine and obtained positive results. In the first experiment, we compared participants’ ratings of pleasure, arousal, and user experience for mediated kissing with those for real kissing in a lab setting. Results showed that mediated kissing using Kissenger elicited similar ratings for pleasure, arousal and user experience as real kissing. We conducted a unique embodied Imitation Game to investigate the effects of haptic communication in a Turing test. Participants acted as interrogators in the Imitation Game and they had higher odds of winning the game when Kissenger was used during the game with both human and chatbot interlocutors. Lastly, we conducted a one-week trial with real life long distance couples to study the effects of using Kissenger on psychological measures. Couples who used Kissenger for a week experienced a significant increase in relationship satisfaction and decrease in perceived stress levels.
Notes
1 The HugShirt. www.cutecircuit.com/the-hug-shirt.
2 Tjacket. www.mytjacket.com.
3 Smartstones Touch. www.smartstones.co/swipe-to-speak-prose.
4 The science behind Force Touch and the Taptic Engine. https://www.imore.com/science-behind-taptics-and-force-touch.
5 FLEXINOL Actuator Wire: http://www.dynalloy.com/flexinol.php.
Acknowledgement
The authors would like to warmly thank Dr. David Levy for his advice on this paper’s research and experiments.
References
1 | Avraham, G., Nisky, I., Fernandes, H.L., Acuna, D.E., Kording, K.P., Loeb, G.E. & Karniel, A. ((2012) ). Toward perceiving robots as humans: Three handshake models face the Turing-like handshake test. IEEE Transactions on Haptics, 5: (3), 196–207. doi:10.1109/TOH.2012.16. |
2 | Chang, A., O’Modhrain, S., Jacob, R., Gunther, E. & Ishii, H. ((2002) ). Comtouch: Design of a vibrotactile communication device. In Proceedings of the 4th Conference on Designing Interactive Systems: Processes, Practices, Methods, and Techniques (pp. 312–320). ACM. |
3 | Cheok, A.D. ((2010) ). Huggy pajama: A remote interactive touch and hugging system. In Art and Technology of Entertainment Computing and Communication (pp. 161–194). Springer. doi:10.1007/978-1-84996-137-0_7. |
4 | Cheok, A.D. & Zhang, E.Y. ((2019) ). Kissenger: Transmitting kiss through the Internet. In Human–Robot Intimate Relationships (pp. 77–97). Springer. doi:10.1007/978-3-319-94730-3_4. |
5 | Cohen, S., Kamarck, T. & Mermelstein, R. ((1983) ). A global measure of perceived stress. Journal of Health and Social Behavior, 24: (4), 385–396. |
6 | Crusco, A.H. & Wetzel, C.G. ((1984) ). The Midas Touch: The effects of interpersonal touch on restaurant tipping. Personality and Social Psychology Bulletin, 10: (4), 512–517. doi:10.1177/0146167284104003. |
7 | DiSalvo, C., Gemperle, F., Forlizzi, J. & Montgomery, E. ((2003) ). The Hug: An exploration of robotic form for intimate communication. In The 12th IEEE International Workshop on Robot and Human Interactive Communication, ROMAN 2003 (pp. 403–408). IEEE. doi:10.1109/ROMAN.2003.1251879. |
8 | El Saddik, A., Orozco, M., Eid, M. & Cha, J. ((2011) ). Multimedia haptics. In Haptics Technologies: Bringing Touch to Multimedia (Vol. 6: , pp. 145–182). Springer. |
9 | Floyd, K., Boren, J.P., Hannawa, A.F., Hesse, C., McEwan, B. & Veksler, A.E. ((2009) ). Kissing in marital and cohabiting relationships: Effects on blood lipids, stress, and relationship satisfaction. Western Journal of Communication, 73: (2), 113–133. doi:10.1080/10570310902856071. |
10 | Gooch, D. & Watts, L. ((2012) ). It’s neat to feel the heat: How can we hold hands at a distance? In CHI’12: Extended Abstracts on Human Factors in Computing Systems (pp. 1535–1540). ACM. |
11 | Grewen, K.M., Anderson, B.J., Girdler, S.S. & Light, K.C. ((2003) ). Warm partner contact is related to lower cardiovascular reactivity. Behavioral Medicine, 29: (3), 123–130. 15206831. doi:10.1080/08964280309596065. |
12 | Haans, A. & IJsselsteijn, W.A. ((2009) ). The virtual Midas Touch: Helping behavior after a mediated social touch. IEEE Transactions on Haptics, 2: (3), 136–140. doi:10.1109/TOH.2009.20. |
13 | Hassenzahl, M., Burmester, M. & Koller, F. ((2003) ). Attrakdiff: A questionnaire to measure perceived hedonic and pragmatic quality. In Mensch & Computer (pp. 187–196). |
14 | Hatzfeld, C. ((2014) ). Haptics as an interaction modality. In C. Hatzfeld and T.A. Kern (Eds.), Engineering Haptic Devices: A Beginner’s Guide (pp. 29–100). |
15 | Haus, H., Kern, T.A., Matysek, M. & Sindlinger, S. ((2014) ). Actuator design. In C. Hatzfeld and T.A. Kern (Eds.), Engineering Haptic Devices: A Beginner’s Guide. |
16 | Hemmert, F., Gollner, U., Löwe, M., Wohlauf, A. & Joost, G. ((2011) ). Intimate mobiles: Grasping, kissing and whispering as a means of telecommunication in mobile phones. In Proceedings of the 13th International Conference on Human Computer Interaction with Mobile Devices and Services (pp. 21–24). ACM. |
17 | Hendrick, S.S. ((1988) ). A generic measure of relationship satisfaction. Journal of Marriage and the Family, 50: (1), 93–98. doi:10.2307/352430. |
18 | Hertenstein, M.J., Keltner, D., App, B., Bulleit, B.A. & Jaskolka, A.R. ((2006) ). Touch communicates distinct emotions. Emotion, 6: (3), 528–533. doi:10.1037/1528-3542.6.3.528. |
19 | Hughes, S.M., Harrison, M.A. & Gallup, G.G. ((2007) ). Sex differences in romantic kissing among college students: An evolutionary perspective. Evolutionary Psychology, 5: (3), 612–631. doi:10.1177/147470490700500310. |
20 | Iwata, H., Yano, H., Nakaizumi, F. & Kawamura, R. ((2001) ). Project FEELEX: Adding haptic surface to graphics. In Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques (pp. 469–476). ACM. |
21 | Jang, S., Kim, L.H., Tanner, K., Ishii, H. & Follmer, S. ((2016) ). Haptic edge display for mobile tactile interaction. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems (pp. 3706–3716). ACM. doi:10.1145/2858036.2858264. |
22 | Kerk, H. Haydon Kerk FAQ about leadscrews. http://www.haydonkerk.com/FAQs/tabid/275/Default.aspx. |
23 | Kuwamura, K., Sakai, K., Minato, T., Nishio, S. & Ishiguro, H. ((2013) ). Hugvie: A medium that fosters love. In 2013 IEEE RO-MAN (pp. 70–75). IEEE. doi:10.1109/ROMAN.2013.6628533. |
24 | Kyung, K.-U. & Lee, J.-Y. ((2009) ). Ubi-pen: A haptic interface with texture and vibrotactile display. IEEE Computer Graphics and Applications, 1: , 56–64. doi:10.1109/MCG.2009.17. |
25 | Light, K.C., Grewen, K.M. & Amico, J.A. ((2005) ). More frequent partner hugs and higher oxytocin levels are linked to lower blood pressure and heart rate in premenopausal women. Biological Psychology, 69: (1), 5–21. doi:10.1016/j.biopsycho.2004.11.002. |
26 | Light, K.C., Smith, T.E., Johns, J.M., Brownley, K.A., Hofheimer, J.A. & Amico, J.A. ((2000) ). Oxytocin responsivity in mothers of infants: A preliminary study of relationships with blood pressure during laboratory stress and normal ambulatory activity. Health Psychology, 19: (6), 560–567. doi:10.1037/0278-6133.19.6.560. |
27 | Marsh, J., Glencross, M., Pettifer, S. & Hubbold, R. ((2006) ). A network architecture supporting consistent rich behavior in collaborative interactive applications. IEEE Transactions on Visualization and Computer Graphics, 12: (3), 405–416. doi:10.1109/TVCG.2006.40. |
28 | McGlone, F., Wessberg, J. & Olausson, H. ((2014) ). Discriminative and affective touch: Sensing and feeling. Neuron, 82: (4), 737–755. doi:10.1016/j.neuron.2014.05.001. |
29 | Mehrabian, A. & Russell, J.A. ((1974) ). An Approach to Environmental Psychology. MIT Press. |
30 | Miyoshi, T., Ueno, Y., Kawase, K., Matsuda, Y., Ogawa, Y., Takemori, K. & Terashima, K. ((2015) ). Development of handshake gadget and exhibition in niconico chokaigi. In Haptic Interaction (pp. 267–272). Springer. doi:10.1007/978-4-431-55690-9_49. |
31 | Motamedi, M., Florant, D. & Duchaine, V. ((2017) ). Comparing the exteroceptive feedback of normal stress, skin stretch and vibrotactile stimulation for restitution of static events. Frontiers in Robotics and AI, 4: , 6. doi:10.3389/frobt.2017.00006. |
32 | Mueller, F., Vetere, F., Gibbs, M.R., Kjeldskov, J., Pedell, S. & Howard, S. ((2005) ). Hug over a distance. In CHI’05: Extended Abstracts on Human Factors in Computing Systems (pp. 1673–1676). ACM. |
33 | O’Brien, S. & Mueller, F. ((2006) ). Holding hands over a distance: Technology probes in an intimate, mobile context. In Proceedings of the 18th Australia Conference on Computer–Human Interaction: Design: Activities, Artefacts and Environments (pp. 293–296). ACM. |
34 | Ortiz, C.L. Jr. ((2016) ). Why we need a physically embodied Turing test and what it might look like. AI Magazine, 37: (1), 55–63. doi:10.1609/aimag.v37i1.2645. |
35 | Park, S., Park, S., Baek, S.-Y. & Ryu, J. ((2014) ). A human-like bilateral tele-handshake system: Preliminary development. In Haptics: Neuroscience, Devices, Modeling, and Applications (pp. 184–190). Springer. doi:10.1007/978-3-662-44196-1_23. |
36 | Park, Y.-W., Bae, S.-H. & Nam, T.-J. ((2012) ). How do couples use cheektouch over phone calls? In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (pp. 763–766). ACM. |
37 | Poupyrev, I., Nashida, T., Maruyama, S., Rekimoto, J. & Yamaji, Y. ((2004) ). Lumen: Interactive visual and shape display for calm computing. In ACM SIGGRAPH 2004 Emerging Technologies (p. 17). ACM. doi:10.1145/1186155.1186173. |
38 | Saadatian, E., Samani, H., Parsani, R., Pandey, A.V., Li, J., Tejada, L., Cheok, A.D. & Nakatsu, R. ((2014) ). Mediating intimacy in long-distance relationships using kiss messaging. International Journal of Human–Computer Studies, 72: (10), 736–746. doi:10.1016/j.ijhcs.2014.05.004. |
39 | Salminen, K., Surakka, V., Lylykangas, J., Raisamo, J., Saarinen, R., Raisamo, R., Rantala, J. & Evreinov, G. ((2008) ). Emotional and behavioral responses to haptic stimulation. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems (pp. 1555–1562). ACM. |
40 | Samani, H.A., Parsani, R., Rodriguez, L.T., Saadatian, E., Dissanayake, K.H. & Cheok, A.D. ((2012) ). Kissenger: Design of a kiss transmission device. In Proceedings of the Designing Interactive Systems Conference (pp. 48–57). ACM. doi:10.1145/2317956.2317965. |
41 | Singhal, S., Neustaedter, C., Ooi, Y.L., Antle, A.N. & Matkin, B. ((2017) ). Flex-n-feel: The design and evaluation of emotive gloves for couples to support touch over distance. In Proceedings of the 2017 ACM Conference on Computer Supported Cooperative Work and Social Computing (pp. 98–110). ACM. |
42 | Smith, J. & MacLean, K. ((2007) ). Communicating emotion through a haptic link: Design space and methodology. International Journal of Human–Computer Studies, 65: (4), 376–387. doi:10.1016/j.ijhcs.2006.11.006. |
43 | Sumioka, H., Nakae, A., Kanai, R. & Ishiguro, H. ((2013) ). Huggable communication medium decreases cortisol levels. Scientific Reports, 3: , 3034. doi:10.1038/srep03034. |
44 | Takahashi, K., Mitsuhashi, H., Murata, K., Norieda, S. & Watanabe, K. ((2011) a). Improving shared experiences by haptic telecommunication. In 2011 International Conference on Biometrics and Kansei Engineering (ICBAKE) (pp. 210–215). IEEE. doi:10.1109/ICBAKE.2011.19. |
45 | Takahashi, N., Kuniyasu, Y., Sato, M., Fukushima, S., Furukawa, M., Hashimoto, Y. & Kajimoto, H. ((2011) b). A remote haptic communication device that evokes a feeling of kiss. Interaction, 2: . |
46 | Tekscan. Force sensor for design. |
47 | Tekscan. Load cell vs. force sensor. |
48 | Tsetserukou, D. ((2010) ). Haptihug: A novel haptic display for communication of hug over a distance. In Haptics: Generating and Perceiving Tangible Sensations (pp. 340–347). |
49 | Turing, A.M. ((1950) ). Computing machinery and intelligence. Mind, 59: (236), 433–460. doi:10.1093/mind/LIX.236.433. |
50 | van Erp, J.B. & Toet, A. ((2015) ). Social touch in human–computer interaction. Frontiers in Digital Humanities, 2: , 2. doi:10.3389/fdigh.2015.00002. |
51 | Wang, R. & Quek, F. ((2010) ). Touch & talk: Contextualizing remote touch for affective interaction. In Proceedings of the Fourth International Conference on Tangible, Embedded, and Embodied Interaction (pp. 13–20). ACM. doi:10.1145/1709886.1709891. |
52 | Zhang, E.Y. & Cheok, A.D. ((2016) ). Forming intimate human–robot relationships through a kissing machine. In Proceedings of the Fourth International Conference on Human Agent Interaction (pp. 233–234). ACM. |
53 | Zhang, E.Y., Cheok, A.D., Arsovski, S. & Muniru, I.O. ((2017) ). Exploring the role of robotic kissing “kissenger” in digital communication through Alan Turing’s imitation game. In IECON 2017 – 43rd Annual Conference of the IEEE Industrial Electronics Society (pp. 2870–2875). IEEE. doi:10.1109/IECON.2017.8216484. |
54 | Zhang, E.Y., Nishiguchi, S., Cheok, A.D. & Morisawa, Y. ((2016) ). Kissenger – Development of a real-time Internet kiss communication interface for mobile phones. In International Conference on Love and Sex with Robots (pp. 115–127). Springer. |


