
A Brief Survey of Clipping and Intersection Algorithms with a List of References (including Triangle-Triangle Intersections)✩
Abstract
This contribution presents a brief survey of clipping and intersection algorithms in
This survey is intended to help researchers, students, and practitioners dealing with intersection and clipping algorithms.
1Introduction
Intersection algorithms are key algorithms in many areas, e.g. in geometry intersection algorithms of two lines in
Algorithms for intersection computation of different geometric entities in
It should be noted that, not only in geometry oriented algorithms, a special care has to be devoted to the cases where differences between mathematics with infinite precision and mathematics with a limited precision might cause problems leading to the unexpected and incorrect results, sometimes also leading to disasters.
Unfortunately, programmers and computer scientists are mostly targeted at “the technology of implementation”. They have a limited understanding of numerical aspects of today’s numerical data representation, limited more or less to the IEEE-754 floating-point representation (Wikipedia, 2021b). Despite the technological progress, the binary128 and binary256 precision are not supported in hardware. It appears that there is no possibility to represent rational, irrational and transcendental numbers used in mathematics, where unlimited accuracy is expected, e.g. what is the difference between the value of
Line, half-line (ray), line segment and triangle-triangle intersection algorithms are considered fundamental in nearly all algorithms dealing with geometrical aspects (Skala, 2022).
2Projective Space and Principle of Duality
The majority of intersection algorithms have been developed for the Euclidean space representation in spite of the fact that geometric transformations, i.e. projection, translation, rotation, scaling and Window-Viewport etc., use homogeneous coordinates, i.e. projective representation. This results into the necessity to convert the results of the geometric transformations to the Euclidean space using division operation.
2.1Projective Extension of the Euclidean Space
The conversion of a point
(1)
It means that a point
The extension to the
(2)
The use of the projective extension of the Euclidean space is convenient not only for geometric transformations, as it replaces addition by multiplication in the case of translation operation, but it enables to represent a point in infinity. Also, it enables to express some geometric entities in a more compact form, e.g. a line in the
(3)
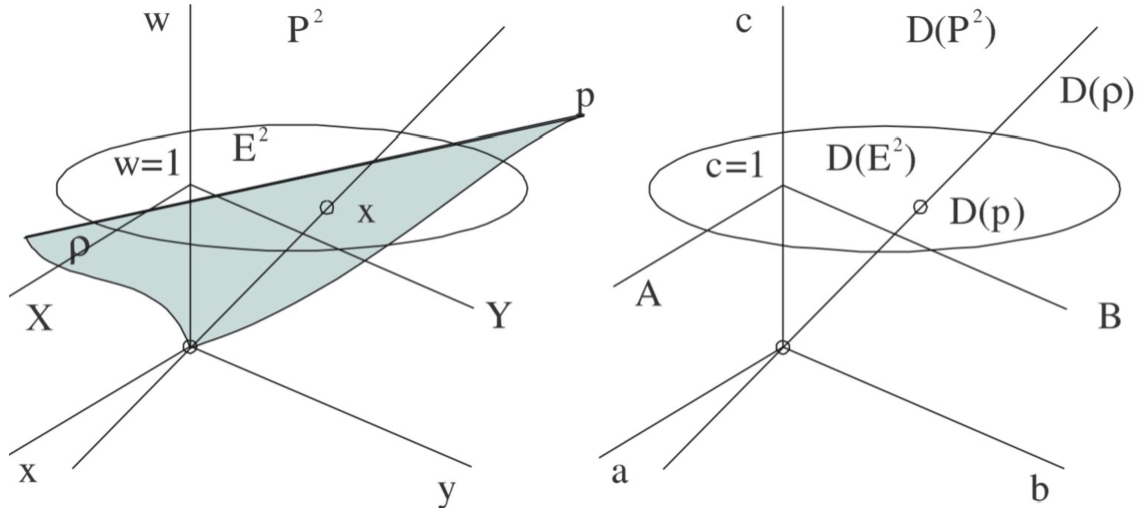
Fig. 1
Projective space and its dual.
It is necessary to note that
(4)
In many cases, the principle of duality can be used to derive a solution of a dual problem and have only one programming sequence for both problems, i.e. the primary one and the dual. Figure 1 presents the duality in
2.2Principle of Duality
The principle of duality is one of essential principles in mathematics. In our case of geometric problems described by linear equations, see Eq. (3) and Eq. (4), the principle of duality states that any theorem remains true when we interchange the words:
• “point” and “line” in the
• “lie on” and “pass through”, “join” and “intersection” and so on.
In other words, the principle of duality in the
(5)
Generally, a system of linear equations
(6)
It should be noted that a line in
(7)
(8)
In computer graphics, some intersection algorithms are called clipping algorithms and serve to determine a part of one geometric entity inside the second one.
In the following, a brief classification of intersection algorithms in 2D and 3D will be presented with short characteristics; a short overview can be found in Wikipedia (2021a).
There are many variants of fundamental algorithms that differ in some aspects; mainly, the timing factor is the primary motivation. However, the claimed speed up mostly depends on the hardware properties (memory caching, processor used, etc.), programmer’s skill and actual language and compiler used.
3Intersection Algorithms in 2D
Algorithms for intersections of different 2D geometric entities have been studied for a long time from various aspects, primarily due to the computation speed, robustness and limited numerical precision of the floating-point representation. The majority of 2D algorithms deal with an intersection of a line or a half-line (ray) or a line segment with 2D geometric entity, e.g. a rectangle, convex polygon (Cyrus and Beck, 1978; Rappoport, 1991), non-convex polygon (Weiler and Atherton, 1977), quadric and cubic curves, parametric curves (Skala, 2021a) and areas with quadratic arcs (Skala, 2015, 1989, 1990a), etc.
There are two main strategies, which are “dual” in some sense:
• a position of the window, resp. polygon edges against the intersected line, resp. line segment, etc.,
• a position of the vertices of the window, resp. polygon against the intersected line, resp. line segment, etc.
3.1Intersection with a Rectangular Area
Fig. 2
Cohen-Sutherland coding.
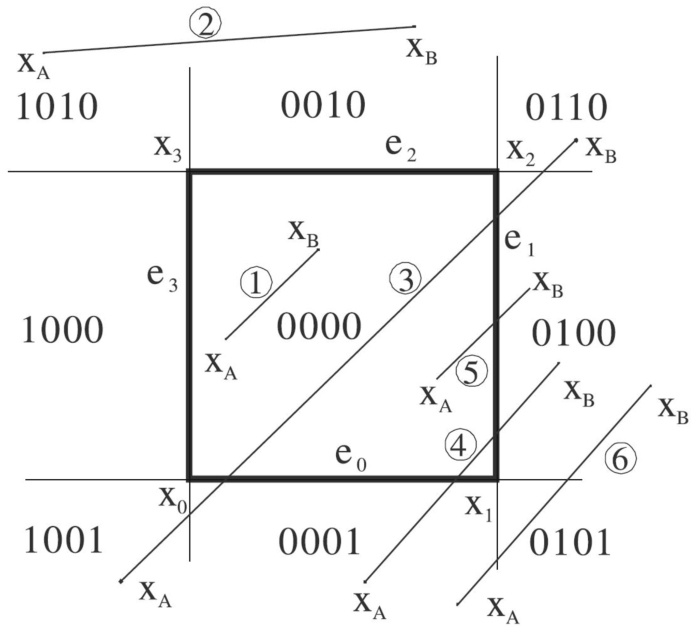
Intersection algorithms with a rectangular area (window) are well known as the line clipping or as the line segment clipping algorithms. The first algorithm was developed and used for the flight simulator project led by Cohen (1969) in 1967. Efficient coding of the line segment position coding leading to significant computational reduction was introduced in Sproull and Sutherland (1968) and patented in 1972 (Sutherland, 1972). The Cohen-Sutherland algorithm is described in Newman and Sproull (1979), Comninos (2006), Matthes and Drakopoulos (2019a, 2019b), etc. The Cohen-Sutherland algorithm generates a bit-code LRTB, i.e. [Left, Right, Top, Bottom], for each end-point of the line segment, see Fig. 2. The coding is redundant. However, it enables simple identification of the cases, when the line segment is totally inside or outside as follows:
• if
• if
The ultimately deep classification of all the possible cases using arithmetic operation with the codes was described in Skala (2021b), see Table 1 and Fig. 3. The
Table 1
Numerical summation codes
| IN | C | S | C | S | C | S | C | S | |||
| 0 | 5 | 4 | 6 | 2 | 10 | 8 | 9 | 1 | |||
| 0000 | 0101 | 0100 | 0110 | 0010 | 1010 | 1000 | 1001 | 0001 | |||
| IN | 0 | 0000 | IN | 5 | 4 | 6 | 2 | 10 | 8 | 9 | 1 |
| C | 5 | 0101 | 5 | n/a | n/a | n/a | 7 | 15 | 13 | n/a | n/a |
| S | 4 | 0100 | 4 | n/a | n/a | n/a | 6 | 14 | 12 | 13 | 5 |
| C | 6 | 0110 | 6 | n/a | n/a | n/a | n/a | n/a | 14 | 15 | 7 |
| S | 2 | 0010 | 2 | 7 | 6 | n/a | n/a | n/a | 10 | 11 | 3 |
| C | 10 | 1010 | 10 | 15 | 14 | n/a | n/a | n/a | n/a | n/a | 11 |
| S | 8 | 1000 | 8 | 13 | 12 | 14 | 10 | n/a | n/a | n/a | 9 |
| C | 9 | 1001 | 9 | n/a | 13 | 15 | 11 | n/a | n/a | n/a | n/a |
| S | 1 | 0001 | 1 | n/a | 5 | 7 | 3 | 11 | 9 | n/a | n/a |
Fig. 3
Two specific situations – SS-SnCS: side-side and side-neighbour corner-side.
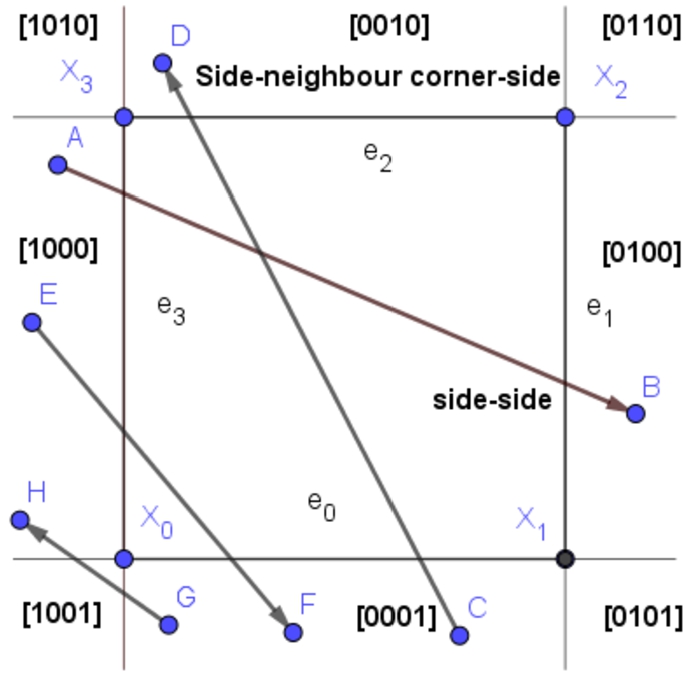
Distinguishing all the cases leads to more efficient coding and efficient implementation (Skala, 2021b); specific cases are presented in Table 2.
Table 2
Possible cases: n/a – non-applicable or solved by the C-S coding, C – corner area, S – side area, IN – inside area, End-points: IC – inside-corner, IS – inside-side; Cases: SS – side-side, SnCS – side-near corner-side, SdC – side-distant corner-side, CoC – corner-opposite corner, id – case re-indexing.
| id | −1 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | ||
| Case | IN | C | S | C | S | C | S | C | S | ||
| 0 | 5 | 4 | 6 | 2 | 10 | 8 | 9 | 1 | |||
| 0000 | 0101 | 0100 | 0110 | 0010 | 1010 | 1000 | 1001 | 0001 | |||
| IN | 0 | 0000 | IN | IC | IS | IC | IS | IC | IS | IC | IS |
| C | 5 | 0101 | IC | n/a | n/a | n/a | SdC | CoC | SdC | n/a | n/a |
| S | 4 | 0100 | IS | n/a | n/a | n/a | SnCS | SdC | SS | SdC | SnCS |
| C | 6 | 0110 | IC | n/a | n/a | n/a | n/a | n/a | SdC | CoC | SdC |
| S | 2 | 0010 | IS | SdC | SnCS | n/a | n/a | n/a | SnCS | SdC | SS |
| C | 10 | 1010 | IC | CoC | SdC | n/a | n/a | n/a | n/a | n/a | SdC |
| S | 8 | 1000 | IS | SdC | SS | SdC | SnCS | n/a | n/a | n/a | SnCS |
| C | 9 | 1001 | IC | n/a | SdC | CoC | SdC | n/a | n/a | n/a | n/a |
| S | 1 | 0001 | IS | n/a | SnCS | SdC | SS | SdC | SnCS | n/a | n/a |
The Cohen-Sutherland algorithm can also be extended to the 3D case, i.e. intersection of a line segment with a cube or right-angled parallelepiped.
Fig. 4
Nicholl-Lee-Nicholl algorithm – window corners position evaluation.
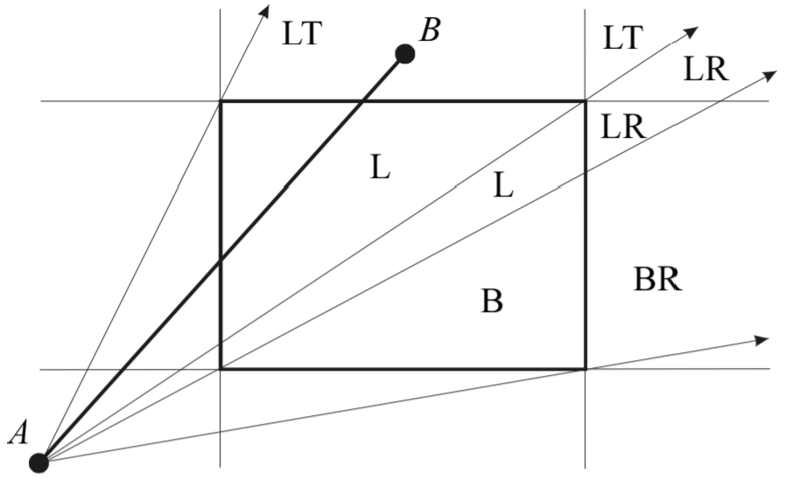
The Cohen-Sutherland algorithm was improved by Nicholl et al. (1987). It uses the window corners position classification in relation to the line segment position, see Fig. 4. The Nicholl-Lee-Nicholl algorithm was improved by Bui and Skala (1998) using some additional classification of possible cases and extended to the
The algorithms (Liang and Barsky, 1983) and (Dörr, 1990) are based on the direct intersection computation of a line with the polygon edges in the parametric form. Analysis of the Nicholl-Lee-Nicholl and Liang-Barsky algorithms was given in Devai (2005). Simple and robust line and line segment clipping algorithms in
Fig. 5
Clipping against the rectangular window in
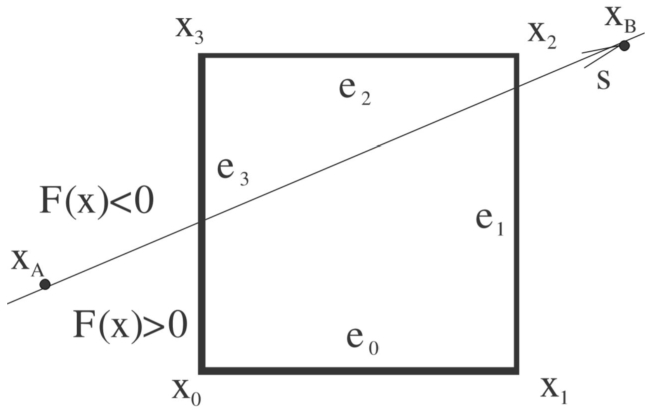
3.2S-L-Clip Algorithm
Let us consider an implicit function
The clipping operation should determine the intersection points
(9)
Table 3
All cases; N/A – non-applicable (impossible) cases.
| c | c | TAB1 | TAB2 | MASK |
| 0 | 0000 | None | None | None |
| 1 | 0001 | 0 | 3 | 0100 |
| 2 | 0010 | 0 | 1 | 0100 |
| 3 | 0011 | 1 | 3 | 0010 |
| 4 | 0100 | 1 | 2 | 0010 |
| 5 | 0101 | N/A | N/A | N/A |
| 6 | 0110 | 0 | 2 | 0100 |
| 7 | 0111 | 2 | 3 | 1000 |
| c | c | TAB1 | TAB2 | MASK |
| 15 | 1111 | None | None | None |
| 14 | 1110 | 3 | 0 | None |
| 13 | 1101 | 1 | 01 | 0100 |
| 12 | 1100 | 3 | 1 | 0010 |
| 11 | 1011 | 2 | 1 | 0010 |
| 10 | 1010 | N/A | N/A | N/A |
| 9 | 1001 | 2 | 0 | 0100 |
| 8 | 1000 | 3 | 2 | 1000 |
Algorithm 1
S-L-Clip – line clipping algorithm by the rectangular window
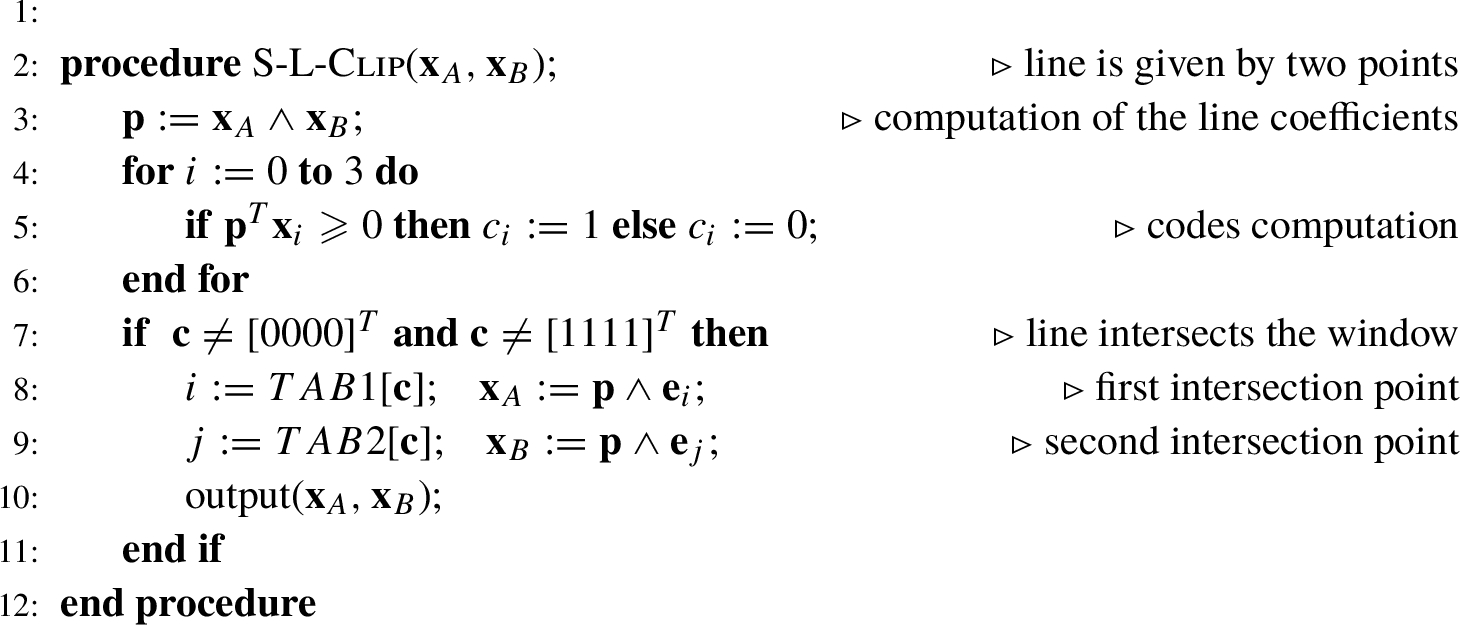
It can be seen, that the S-L-Clip Algorithm 1 is quite simple and easily extensible for the convex polygon clipping case as well. Table 3 can be generated synthetically. It is significantly more straightforward than the algorithm (Liang and Barsky, 1984). It also supports SSE4 and GPU use directly and leads to simple implementations, as the cross-product and dot-product operations, are supported in hardware. It should be noted, that the algorithm is designed for a very general case, as the window corners and the points defining the line, are generally in the projective representation, i.e.
The modification of the S-L-Clip algorithm for a line segment clipping is simple and described in Skala (2004). The advantage of it is that the end-points and the window corners might be given generally in the projective space, i.e.
Other proposed modifications of algorithms can be found in Bui (1999), Andreev and Sofianska (1991), Bao and Peng (1996), Devai (2005, 2006, 1998), Duvalenko et al. (1990, 1993, 1996), Cai et al. (2001), Day (1992a, 1992b), Evangeline and Anitha (2014), Kaijian et al. (1990), Kodituwakku et al. (2013), Kong and Yin (2001), Maillot (1992), Wei et al. (2013), Slater and Barsky (1994), Ray (2012a, 2012b, 2014, 2015), Li (2016), Singh and Lumar (2016), Dev and Saharan (2019).
Some additional modifications of algorithms were published in Brackenbury (1984), Chao et al. (2009), Cheng and Yen (1989), Dimri (2015), Dimri et al. (2022), Elliriki et al. (2019), Hattab and Yusof (2014), Iraji et al. (2011), Jiang and Han (2013), Jianrong (2006), Kumar and Awasthi (2011), Kuzmin (1995), Li et al. (2014), Li and Lei (2012), Meriaux (1984), Molla et al. (2003), Nisha (2017b, 2017a), Sobkow et al. (1987), Sharma and Manohar (1993), Wang et al. (1998a, 1998b, 2012, 2001), Yang (1988), Pandey and Jain (2013), Bhuiyan (2009). The hardware FPGA implementation was proposed in Dawod (2011).
Analysis and comparisons of some clipping algorithms were published recently in Krammer (1992), Skala and Huy (2000), Skala et al. (1995), Nisha (2017a, 2017b), Matthes and Drakopoulos (2022), Ray (2012b).
3.3Intersection with Polygons
Generic solutions for polygon clipping were developed by Weiler and Atherton (1977), Rappoport (1991), Vatti (1992), Wu et al. (2004), Xie et al. (2010), Zhang and Sabharwal (2002), Zhang et al. (2022). Boolean operations with polygons were introduced by Rivero and Feito (2000), Martinez et al. (2009).
Algorithms for a line clipping
In the non-convex polygon cases, when the polygon can be self-intersecting, etc., problems with robustness of computation can be expected. Also, in some cases a three-value logic is to be used in order to solve specific cases properly, e.g. a line passes a vertex, a line touches a vertex, a line lies on an edge, etc. (Mccoid and Gander, 2022; Skala, 1989, 1990a).
3.4Convex Polygons
The Cyrus-Beck’s algorithm (Cyrus and Beck, 1978) is probably the famous algorithm for line-convex polygon clipping. It is based on a computation of the parameter t of the given line in the parametric form with edges of the given convex polygon, Fig. 6. The algorithm is of
Fig. 6
Cyrus-Beck line clipping algorithm.
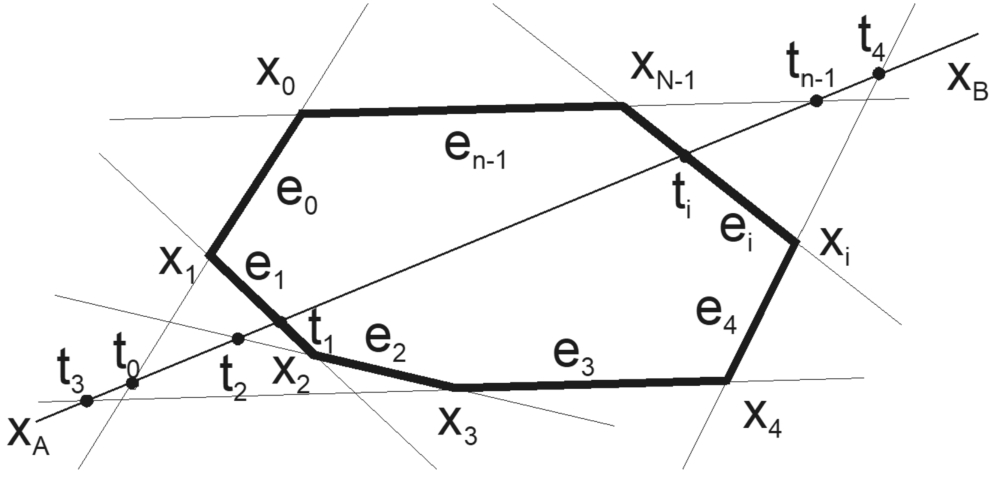
The Cyrus-Beck’s algorithm is based on direct intersection computation of the given line p in the parametric form and a line on which the polygon edge
(10)
Solving those equations, the parameter t for the intersection point is obtained as:
(11)
(12)
It is hard to detect and solve such cases reliably and programmers usually use a sequence like
However, textbooks do not point out such dangerous construction as far as robustness and computational stability are concerned.
The modification of the Cyrus-Beck’s algorithm using the cross product for more reliable detection of the “close to singular” cases was described by Skala (1993). Probably the most reliable modification of the Cyrus-Beck’s algorithm is to use:
Algorithm 2
Cyrus-Beck’s line clipping algorithm
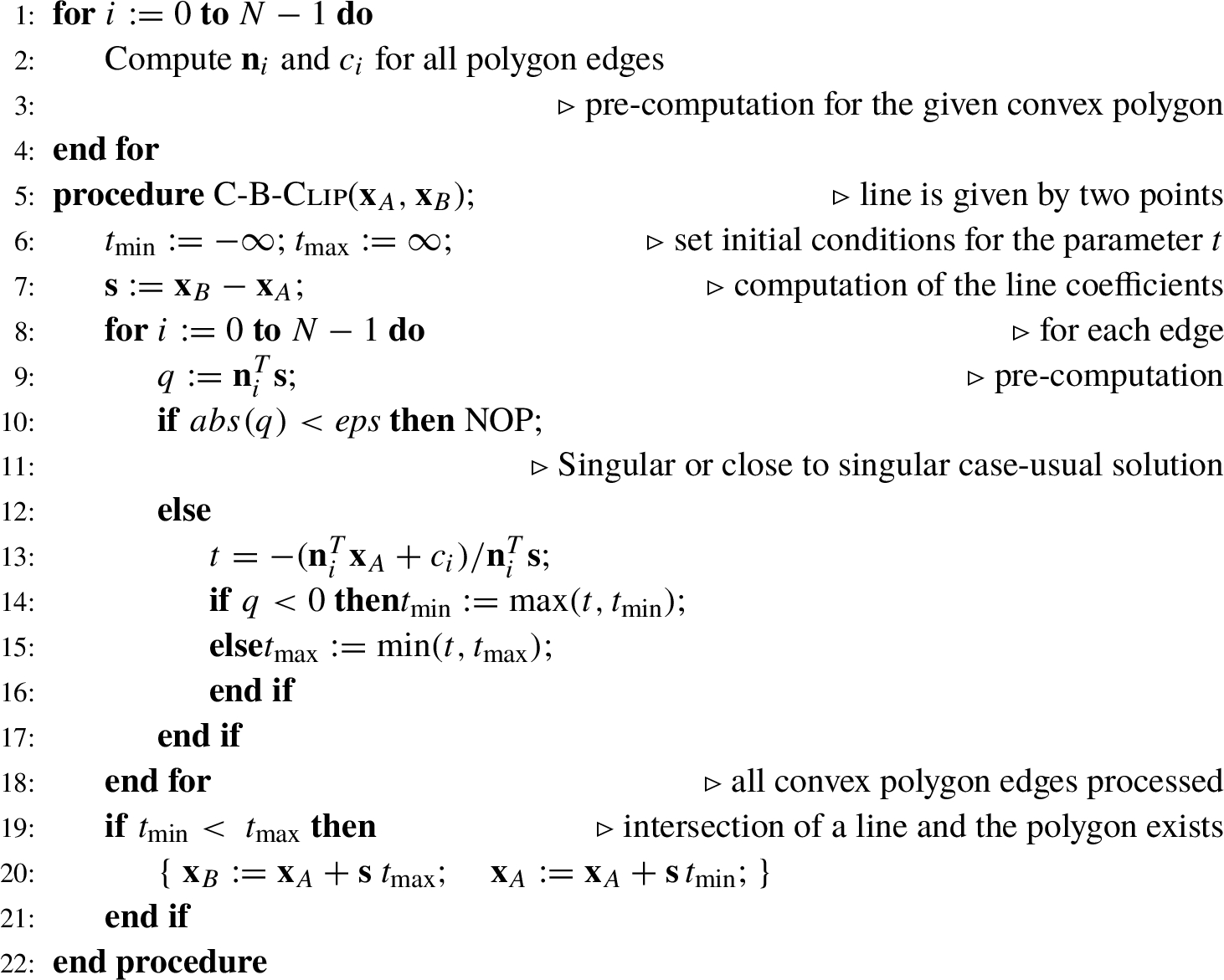
The Cyrus-Beck’s algorithm for a line clipping is described by Algorithm 2. It can be easily modified for the line segment clipping just restricting the range of the parameter t to
(13)
However, only 2 values (
Some improvements and modifications were described by Skala (1993). As the edges of the convex polygon are ordered, the algorithm with the
Another approach based on the implicit form of the given line and convex polygon vertices classification, the S-Clip algorithm, was developed in Skala (2021c) and modified by Konashkova (2014, 2015). Another algorithm based on the S-Clip algorithm was described in Skala (2021c). An algorithm for a line segment clipping based on the line segment end-points evaluation with the
The Liang-Barsky algorithm (Liang and Barsky, 1984, 1983) based on direct intersection computation of a line with the convex polygon edges in the parametric form has the
The algorithm with the run-time
Other related algorithms or modifications of existing ones were published by: Li (2005), Nishita and Johan (1999), Raja (2019), Sun et al. (2006), Vatti (1992), Wang et al. (2005), Wijeweera et al. (2019), Sharma and Kaur (2016), Sharma and Manohar (1992) use the affine transformation.
3.5Non-Convex Polygons
Probably, the first algorithm dealing with the non-convex polygon clipping was published in the Reentrant polygon clipping algorithm paper (Sutherland and Hodgman, 1974), followed by the Weiler-Atherton algorithm for polygon-polygon clipping (Weiler, 1980; Weiler and Atherton, 1977; Rappoport, 1991).
Intersections with arbitrary non-convex polygons were described in Greiner and Hormann (1998) and solutions of “the singular” (degenerated) cases were described in Foster et al. (2019). The algorithm (Skala, 1989) uses a three-value logic.
A robust solution of triangle-triangle intersection in
Algorithms that also handle arcs and use a three-value logic to handle singular cases properly, including self-intersecting non-convex polygons, were described in Skala (2015, 1989, 1990a), Wang and Chong (2016), Tran (1986).
Non-Polygonal Window
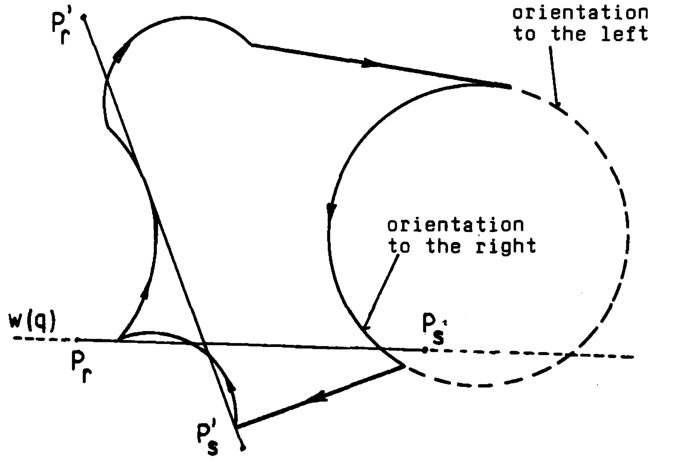
The algorithm for circular arc was described in Van Wyk (1984), Gupta et al. (2016), for overlapping areas by Li et al. (2012) and for circular window in Lu et al. (2002b), Kumar et al. (2018), Wu and Li (2022), Wu et al. (2006), Skala (1989), see Fig. 7. The above-mentioned algorithms lead to algorithms for set operations with polygons, i.e. union, intersection etc. of polygons described, e.g. Kui Liu et al. (2007), Martinez et al. (2009).
3.6Clipping Using Homogeneous Coordinates
Homogeneous coordinates are used in computer graphics not only for geometric transformations. Sproull and Sutherland (1968) used the homogeneous coordinates in the Clipping divider in 1968. Arokiasamy (1989) used them with duality in 1989, Blinn (1991), Blinn and Newell (1978) described the clipping pipeline using the projective extension of the Euclidean space and Nielsen (1995) described the use of semi-homogeneous coordinates for clipping. New approach to 2D clipping based on the separation of the convex polygon vertices by the given line was presented in Kolingerová (1994, 1997) and Skala (2004, 2005, 2012, 2020).
In the following, algorithms related to the intersection in 3D will be briefly mentioned in a short introductory overview.
4Intersection Algorithms in 3D
Intersection algorithms in 3D are widely used in many applications. An overview of the clipping algorithms is given in the Bui’s PhD (Bui, 1999). The intersection of a line segment with a polygon in 3D was studied in Segura and Feito (1998) and the intersection of polygonal models was analysed by Melero et al. (2019). Algorithms for 3D clipping were overviewed in Skala (1990b) and reliable intersection tests with geometrical objects were published by Held (1998). Boolean operations with polygonal and polyhedral meshes were described by Landier (2017).
Line-Viewing Pyramid
Special attention was recently given to a line clipping by a pyramid in 3D due to the perspective pyramid clipping. The problem was analysed recently by Cohen (1969), Sproull and Sutherland (1968), Blinn (1991), Blinn and Newell (1978), Skala and Bui (2000, 2001).
Convex Polyhedron Case
The Cyrus-Beck’s algorithm (Cyrus and Beck, 1978) is probably the famous algorithm for the line-convex polyhedron clipping in
The algorithm with the
Using pre-computation, the algorithm in
Ray-Convex Polyhedron
The Moeller-Trumbore algorithm for a ray-triangle intersection was published in Möller and Trumbore (1997). Since then many modifications and approaches have been published, e.g. Xiao et al. (2020) using GPUs, Skala (2010, 2008a) uses the computation of the barycentric coordinates in the homogeneous coordinates, Rajan et al. (2020) uses dual-precision fixed-point arithmetic for low-power ray-triangle intersections. Platis and Theoharis (2003) published an algorithm for a ray-tetrahedron intersection using the Plücker coordinates. The intersection with the AABBox is described in Eisemann et al. (2007), Kodituwakku and Wijeweera (2012), Maonica et al. (2017) and Mahovsky and Wyvill (2004). Other algorithms are available in Sharma and Manohar (1993), Skala (1996a), Williams et al. (2005), Llanas and Sainz (2012). The 3D line segment-triangle intersection algorithm is described in Jokanovic (2019), Amanatides and Choi (1995), Lagae and Dutré (2005) (in 2D only) and a ray/convex polyhedron intersection was described in Zheng and Millham (1991). Intersection of a line or a ray with a triangle using the SSE4 instructions was developed and described in Havel and Herout (2010). An extensive list of relevant publications can be found via Wikipedia (2021c).
Intersection with Complex Objects
The intersection computation with implicitly defined objects was published by Petrie and Mills (2020), intersection with a torus was published by Cychosz (1991) and alternative formulations were given in Skala (2013a). Reshetov (2022) published an efficient algorithm for a ray/ribbon intersections computation, ray tracing of 3D Bézier curves given by Reshetov (2017) and a ray/bilinear patch intersection (Reshetov, 2019). The intersection with general quadrics using the homogeneous coordinates was described in Skala (2015) and clipping by a spherical window was published by Deng et al. (2006).
However, as polygonal models are mostly formed by triangular surfaces, a special attention is also targeted to triangle-triangle intersections.
Triangle-Triangle Intersection in 3D
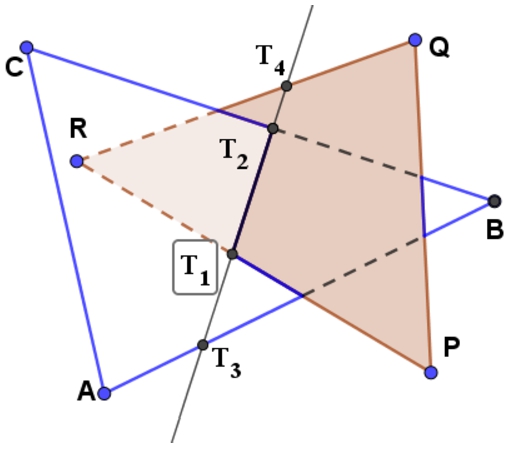
The computation of the intersection of triangles is probably the most important, as nearly all Computer Aided Design (CAD) systems depend on efficient, robust and reliable computation. Figures 8 and 9 present the non-trivial cases, when triangles are split into a set of triangles, which potentially leads to an explosion of small triangles and numerical and robustness problems.
Fig. 8
Triangle-triangle intersection case-1.
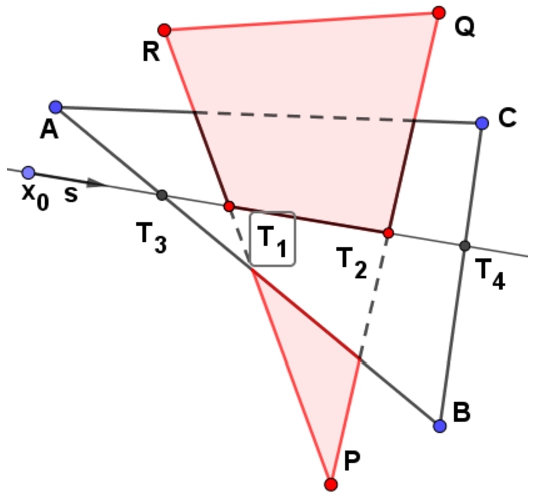
Fig. 9
Triangle-triangle intersection case-2.
In the CAD systems, two different data sets are usually used:
• set of triangles – there is no connection between triangles; typical example is the STL format for the 3D print,
• triangular mesh – there is information on the neighbours of the given triangles and triangles sharing the given vertex; a typical example is the winged edge or the half-edge data structures, etc.
Clipping triangular strips using homogeneous coordinates was described by Maillot (1991) in GEM II (Arvo, 1991). Parallel exact algorithm for the intersection of large 3D triangular meshes was described in de Magalhães et al. (2020) and a comparison of triangle-triangle tests on GPU was described in Xiao et al. (2020). Triangular mesh repair was described by McLaurin et al. (2013).
5Conclusion
This contribution briefly summarizes known clipping algorithms with some extent to the intersection in 3D and ray-tracing related algorithms. The list of published papers related to clipping algorithms should be complete to the author’s knowledge and extensive search via Web of Science, Scopus, Research Gate and WEB search with the related topics. The relevant DOIs were included, if found. If other source was found, the relevant URL was included.
There is hope that this summary will help researchers, students and software developers to find relevant papers easily.
However, developers are urged to consider a limited precision of the floating-point representation (Wikipedia, 2021b) and handle numerical robustness issues properly for near singular cases in the actual implementations.
Surprisingly, during this summary preparation it was found that there are still some problems to be addressed and explored more deeply, like a robust and efficient intersection of triangular meshes as application of triangle-triangle intersection algorithms tend to lead to inconsistencies, inefficiency and unreliability, in general.
A short list of relevant books and research journals is given in Appendix A.
Notes
1 In mathematics, a different notation
2 Actually, it is a bivector (Vince, 2008).
Appendices
Appendix A
There are many books published related to intersection algorithms, clipping and computer graphics, which give more context and deeper understanding, e.g.:
• Salomon, D.: The Computer Graphics Manual – Salomon (2011),
• Salomon, D.: Computer Graphics and Geometric Modelling – Salomon (1999),
• Agoston, M.K.: Computer Graphics and Geometric Modelling: Mathematics – Agoston (2005),
• Agoston, M.K.: Computer Graphics and Geometric Modelling: Implementation & Algorithms – Agoston (2004),
• Lengyel, E.: Mathematics for 3D Game Programming and Computer Graphics – Lengyel (2011),
• Vince, J.: Introduction to the Mathematics for Computer Graphics – Vince (2010)
(basic mathematical description of mathematics for undergraduates),
• Foley, J.D., van Dam, A., Feiner, S., Hughes, J.F.: Computer graphics – principles and practice – Foley et al. (1990),
• Hughes, J.F., van Dam, A., McGuire, M., Sklar, D.F., Foley, J.D., Feiner, S.K., Akeley, K.: Computer Graphics – Principles and Practice – Hughes et al. (2014),
• Ferguson, R.S.: Practical Algorithms for 3D Computer Graphics – Ferguson (2013),
• Shirley, P., Marschner, S.: Fundamentals of Computer Graphics – Shirley and Marschner (2009),
• Marschner, S., Shirley, P.: Fundamentals of Computer Graphics – Marschner and Shirley (2016),
• Theoharis, T., Platis, N., Papaioannou, G., Patrikalakis, N.: Graphics and Visualization: Principles & Algorithms – Theoharis et al. (2008),
• Comninos, P.: Mathematical and Computer Programming Techniques for Computer Graphics – Comninos (2005),
• Schneider, P.J., Eberly, D.H.: Geometric Tools for Computer Graphics – Schneider and Eberly (2003),
• Ammeraal, L., Zhang, K.: Computer graphics for Java programmers – Ammeraal and Zhang (2017),
• Vince, J.: Matrix Transforms for Computer Games and Animation – Vince (2012).
• Hill, F.S., Kelley, S.M.: Computer Graphics Using OpenGL – Hill and Kelley (2006),
• Angel, E., Shreiner, D.: Interactive Computer Graphics – Angel and Shreiner (2011),
• Hearn, D.D., Baker, M.P., Carithers, W.: Computer Graphics with OpenGL – Hearn et al. (2010),
• Govil-Pai, S.: Principles of Computer Graphics: Theory and Practice Using OpenGL and Maya – Govil-Pai (2005).
• Vince, J.: Geometric Algebra: An Algebraic System for Computer Games and Animation – Vince (2009),
• Vince, J.: Geometric Algebra for Computer Graphics – Vince (2008),
• Dorst, L., Fontijne, D., Mann, S.: Geometric Algebra for Computer Science: An Object-Oriented Approach to Geometry – Dorst et al. (2009),
• Hildenbrand, D.: Foundations of Geometric Algebra Computing – Hildenbrand (2012),
• Kanatani, K.: Understanding Geometric Algebra: Hamilton, Grassmann, and Clifford for Computer Vision and Graphics – Kanatani (2015),
• Calvet, R.G.: Treatise of Plane Geometry through Geometric Algebra – Calvet (2007),
• Guo, H.: Modern Mathematics and Applications in Computer Graphics and Vision – Guo (2014),
• Lengyel, E: Mathematics for 3D Game Programming and Computer Graphics – Lengyel (2011),
• Salomon, D.: Transformations and Projections in Computer Graphics – Salomon (2006),
• Salomon, D.: The Computer Graphics Manual – Salomon (2006),
• Pharr, M., Jakob, W., Humphreys, G.: Physically Based Rendering: From Theory to Implementation – Pharr et al. (2016),
• Thomas, A.: Integrated Graphic and Computer Modelling – Thomas (2008) – describes the implementation of algorithms with examples with assembler codes.
• Newman, W.M., Sproull, R.F.: Principles of Interactive Computer Graphics – Newman and Sproull (1979),
• Harrington, S.: Computer Graphics: A Programming Approach – Harrington (1987),
• Mortenson, M.E.: Computer Graphics: An Introduction to the Mathematics and Geometry – Mortenson (1988),
• Watt, A.: Fundamentals of Three-Dimensional Computer Graphics – Watt (1993),
• Akenine-Moller, T., Haines, E., Hoffman, N.: Real-Time Rendering – Akenine-Moller et al. (2008),
• Eberly, D.H.: Game Physics – Eberly (2003),
• Rogers, D.F., Adams, J.A.: Mathematical Elements for Computer Graphics – Rogers and Adams (1989).
• ACM Transactions on Graphics (TOG),
• Computer Graphics Forum (CGF),
• Computers & Graphics (C&G),
• IEEE Trans. on Visualization and Computer Graphics (TVCG),
• The Visual Computer (TVC),
• Computer Animation and Virtual Worlds (CAVW),
• Journal of Graphics Tools (JGT),
• Graphical Models.
Acknowledgements
The author would like to thank colleagues and students at the University of West Bohemia in Pilsen, VSB-Technical University and Ostrava University in Ostrava for their comments and recommendations, anonymous reviewers for hints and constructive suggestions.
The author is also grateful to several authors of recently published relevant papers for sharing their views and hints provided.
References
1 | Agoston, M.K. ((2004) ). Computer Graphics and Geometric Modelling: Implementation & Algorithms. Springer-Verlag, Berlin, Heidelberg. 1852338180. |
2 | Agoston, M.K. ((2005) ). Computer Graphics and Geometric Modelling: Mathematics. Springer-Verlag, Berlin, Heidelberg. 1852338172. |
3 | Akenine-Moller, T., Haines, E., Hoffman, N. ((2008) ). Real-Time Rendering, 3rd ed. A. K. Peters, Ltd., USA. 1568814240. |
4 | Amanatides, J., Choi, K.Y. (1995). Ray Tracing Triangular Meshes. http://www.cs.yorku.ca/~amana/research/mesh.pdf. |
5 | Ammeraal, L., Zhang, K. ((2017) ). Computer Graphics for Java Programmers. Springer Cham. 978-3-319-63356-5 https://doi.org/10.1007/978-3-319-63357-2. |
6 | Andreev, R., Sofianska, E. ((1991) ). New algorithm for two-dimensional line clipping. Computers and Graphics, 15: (4), 519–526. https://doi.org/10.1016/0097-8493(91)90051-I. |
7 | Angel, E., Shreiner, D. ((2011) ). Interactive Computer Graphics: A Top-Down Approach with Shader-Based OpenGL, 6th ed. Addison-Wesley Publishing Company, USA. 0132545233. |
8 | Arokiasamy, A. ((1989) ). Homogeneous coordinates and the principle of duality in two dimensional clipping. Computers and Graphics, 13: (1), 99–100. https://doi.org/10.1016/0097-8493(89)90045-9. |
9 | Arvo, J. ((1991) ). Graphics Gems II. Academic Press Professional, Inc., USA. 0120644800. |
10 | Bao, H., Peng, Q. ((1996) ). Efficient polygon clipping algorithm. Zidonghua Xuebao/Acta Automatica Sinica, 22: (6), 741–744. |
11 | Bhuiyan, M.I. ((2009) ). Designing a line-clipping algorithm by categorizing line dynamically and using intersection point method. In: 2009 International Conference on Electronic Computer Technology, Macau, China, pp. 22–25. https://doi.org/10.1109/ICECT.2009.79. |
12 | Blinn, J.F. ((1977) ). A homogeneous formulation for lines in 3 space. ACM SIGGRAPH Computer Graphics, 11: (2), 237–241. https://doi.org/10.1145/965141.563900. |
13 | Blinn, J.F. ((1991) ). A trip down the graphics pipeline: line clipping. IEEE Computer Graphics and Applications, 11: (1), 98–105. https://doi.org/10.1109/38.67707. |
14 | Blinn, J.F., Newell, M.E. ((1978) ). Clipping using homogeneous coordinates. In: Proceedings of the 5th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH 1978, pp. 245–251. https://doi.org/10.1145/800248.807398. |
15 | Brackenbury, I.F. ((1984) ). Line clipping in interactive computer graphics. IBM Technical Disclosure Bulletin, 27: (1B), 549–552. |
16 | Bui, D.H. (1999). Algorithms for Line Clipping and Their Complexity (supervisor: V. Skala). PhD thesis, University of West Bohemia, Pilsen. http://graphics.zcu.cz/files/DIS_1999_Bui_Duc_Huy.pdf. |
17 | Bui, D.H., Skala, V. ((1998) ). Fast algorithms for clipping lines and line segments in E2. Visual Computer, 14: (1), 31–37. https://doi.org/10.1007/s003710050121. |
18 | Cai, M., Yuan, C.-F., Song, J.-Q., Cai, S.-J. ((2001) ). A fast line clipping algorithm for circular windows. Journal of Computer-Aided Design and Computer Graphics, 13: (12), 1063–1067. https://doi.org/10.5121/ijcga.2018.8201. |
19 | Calvet, R.G. ((2007) ). Treatise of Plane Geometry Through Geometric Algebra. Cerdanyola del Valles, Spain. 978-84-611-9149-9. http://www.xtec.cat/~rgonzal1/treatise-sample.pdf. |
20 | Chang, J.-W., Kim, M.-S. ((2009) ). Technical section: efficient triangle-triangle intersection test for OBB-based collision detection. Computers & Graphics, 33: (3), 235–240. https://doi.org/10.1016/j.cag.2009.03.009. |
21 | Chao, C., Zhaoyin, Z., Changsong, S. ((2009) ). A midpoint segmentation clipping algorithm of circular window against line. In: 2009 International Forum on Computer Science-Technology and Applications, Chongqing, China, pp. 15–19. https://doi.org/10.1109/IFCSTA.2009.10. |
22 | Cheng, F., Yen, Y.-k. ((1989) ). A parallel line clipping algorithm and its implementation. In: Dew, P.M., Heywood, T.R., Earnshaw, R.A. (Eds.), Parallel Processing for Computer Vision and Display. Addison-Wesley, USA, pp. 338–350. 978-0201416053. |
23 | Cohen, D. (1969). Incremental Methods for Computer Graphics. Technical report, Harvard University, Cambridge, Massachusetts, USA. https://apps.dtic.mil/sti/pdfs/AD0694550.pdf. |
24 | Comninos, P. ((2005) ). Mathematical and Computer Programming Techniques for Computer Graphics. Springer-Verlag, Berlin, Heidelberg. 1852339020. https://doi.org/10.1007/978-1-84628-292-8. |
25 | Comninos, P. ((2006) ). Two-dimensional clipping. In: Mathematical and Computer Programming Techniques for Computer Graphics. Springer, London. https://doi.org/10.1007/978-1-84628-292-8_6. |
26 | Coxeter, H.S.M., Beck, G. ((1992) ). The Real Projective Plane. Springer-Verlag, Berlin, Heidelberg. 0387978895. |
27 | Cychosz, J.M. ((1991) ). Intersecting a ray with an elliptical torus. In: Graphics Gems II. Morgan Kaufmann, pp. 251–256. 9780080507545. https://doi.org/10.1016/B978-0-08-050754-5.50054-2. |
28 | Cyrus, M., Beck, J. ((1978) ). Generalized two- and three-dimensional clipping. Computers and Graphics, 3: (1), 23–28. https://doi.org/10.1016/0097-8493(78)90021-3. |
29 | Danaei, B., Karbasizadeh, N., Tale Masouleh, M. ((2017) ). A general approach on collision-free workspace determination via triangle-to-triangle intersection test. Robotics and Computer-Integrated Manufacturing, 44: , 230–241. https://doi.org/10.1016/j.rcim.2016.08.013. |
30 | Dawod, A.I. ((2011) ). Hardware implementation of line clipping algorithm by using FPGA. Tikrit Journal of Engineering Science, 18: , 89–105. |
31 | Day, J.D. ((1992) a). An algorithm for clipping lines in object and image space. Computers and Graphics, 16: (4), 421–426. https://doi.org/10.1016/0097-8493(92)90029-U. |
32 | Day, J.D. ((1992) b). A new two dimensional line clipping algorithm for small windows. Computer Graphics Forum, 11: (4), 241–245. https://doi.org/10.1111/1467-8659.1140241. |
33 | de Magalhães, S.V.G., Franklin, W.R., Andrade, M.V.A. ((2020) ). An efficient and exact parallel algorithm for intersecting large 3-D triangular meshes using arithmetic filters. Computer-Aided Design, 120: , 102801. https://doi.org/10.1016/j.cad.2019.102801. https://www.sciencedirect.com/science/article/pii/S0010448519305330. |
34 | Deng, W., Lu, G., Chen, L. ((2006) ). New 3D line clipping algorithm against spherical surface window. In: International Technology and Innovation Conference 2006 (ITIC 2006). IET, USA, pp. 894–898. 0-86341-696-9. https://doi.org/10.1049/cp:20060886. |
35 | Dev, D., Saharan, P. ((2019) ). Implementation of efficient line clipping algorithm. International Journal of Innovative Technology and Exploring Engineering, 8: (7), 295–298. |
36 | Devai, F. ((1998) ). An analysis technique and an algorithm for line clipping. In: Proceedings. 1998 IEEE Conference on Information Visualization. An International Conference on Computer Visualization and Graphics, London, UK, 1998, pp. 157–165. https://doi.org/10.1109/IV.1998.694214. |
37 | Devai, F. ((2005) ). Analysis of the Nicholl-Lee-Nicholl algorithm. In: Computational Science and Its Applications– ICCSA 2005, Lecture Notes in Computer Science, Vol. 3480: . Springer, Berlin, Heidelberg. https://doi.org/10.1007/11424758_75. |
38 | Devai, F. ((2006) ). A speculative approach to clipping line segments. In: Computational Science and Its Applications – ICCSA 2006, Lecture Notes in Computer Science, Vol. 3980: . Springer, Berlin, Heidelberg. https://doi.org/10.1007/11751540_15. |
39 | Devillers, O., Guigue, P. (2002). Faster Triangle-Triangle Intersection Tests. Technical Report RR-4488, INRIA. https://hal.inria.fr/inria-00072100. |
40 | Dimri, S.C. ((2015) ). Article: a simple and efficient algorithm for line and polygon clipping in 2-D computer graphics. International Journal of Computers and Applications, 127: (3), 31–34. https://doi.org/10.5120/ijca2015906352. |
41 | Dimri, S.C., Tiwari, U.K., Ram, M. ((2022) ). An efficient algorithm to clip a 2D-polygon against a rectangular clip window. Applied Mathematics-A Journal of Chinese Universities, 37: , 147–158. https://doi.org/10.1007/s11766-022-4556-0. |
42 | Dorst, L., Fontijne, D., Mann, S. ((2009) ). Geometric Algebra for Computer Science: An Object-Oriented Approach to Geometry. Morgan Kaufmann Publishers Inc., San Francisco, CA, USA. 9780080553108. https://doi.org/10.1016/B978-0-12-374942-0.X0000-0. |
43 | Duvalenko, V.J., Robbins, W.E., Gyurcsik, R.S. ((1990) ). Improving line segment clipping. Dr Dobb’s Journal, 15: (7), 36. |
44 | Duvanenko, V.J., Gyurcsik, R.S., Robbins, W.E. ((1993) ). Simple and efficient 2D and 3D span clipping algorithms. Computers and Graphics, 17: (1), 39–54. https://doi.org/10.1016/0097-8493(93)90050-J. |
45 | Duvanenko, V.J., Robbins, W.E., Gyurcsik, R.S. ((1996) ). Line-segment clipping revisited. Dr Dobb’s Journal, 21: (1), 107. |
46 | Dörr, M. ((1990) ). A new approach to parametric line clipping. Computer Graphics (Pergamon), 14: (3–4), 449–464. https://doi.org/10.1016/0097-8493(90)90067-8. |
47 | Eberly, D.H. ((2003) ). Game Physics. Elsevier Science Inc., USA. 1558607404. |
48 | Eisemann, M., Magnor, M., Grosch, T., Müller, S. ((2007) ). Fast ray/axis-aligned bounding box overlap tests using ray slopes. Journal of Graphics Tools, 12: (4), 35–46. https://doi.org/10.1080/2151237X.2007.10129248. |
49 | Elliriki, M., Reddy, C., Anand, K. ((2019) ). An efficient line clipping algorithm in 2D space. International Arab Journal of Information Technology, 16: (5), 798–807. https://iajit.org/PDF/September%202019,%20No.%205/11103.pdf. |
50 | Elsheikh, A.H., Elsheikh, M. ((2014) ). A reliable triangular mesh intersection algorithm and its application in geological modelling. Engineering with Computers, 30: (1), 143–157. https://doi.org/10.1007/s00366-012-0297-3. |
51 | Evangeline, D., Anitha, S. ((2014) ). 2D polygon clipping using shear transformation: an extension of shear based 2D line clipping. In: 2014 IEEE IEEE International Conference on Advanced Communications, Control and Computing Technologies, pp. 1379–1383. https://doi.org/10.1109/ICACCCT.2014.7019326. |
52 | Ferguson, R.S. ((2013) ). Practical Algorithms for 3D Computer Graphics, 2nd ed. A. K. Peters, Ltd., USA. 1466582529. |
53 | Foley, J.D., van Dam, A., Feiner, S., Hughes, J.F. ((1990) ). Computer Graphics – Principles and Practice, 2nd ed. Addison-Wesley, USA. 978-0-201-12110-0. |
54 | Foster, E.L., Hormann, K., Popa, R.T. ((2019) ). Clipping simple polygons with degenerate intersections. Computers & Graphics: X, 2: , 100007. https://doi.org/10.1016/j.cagx.2019.100007. |
55 | Glassner, A.S. (Ed.) ((1990) ). Graphics Gems. Academic Press Professional, Inc., USA. http://inis.jinr.ru/sl/vol1/CMC/Graphics_Gems_1,ed_A.Glassner.pdf. 0122861695. |
56 | Govil-Pai, S. ((2005) ). Principles of Computer Graphics: Theory and Practice Using OpenGL and Maya. Springer-Verlag, Berlin, Heidelberg. 0387955046. |
57 | Greiner, G., Hormann, K. ((1998) ). Efficient clipping of arbitrary polygons. ACM Transactions on Graphics, 17: (2), 71–83. https://doi.org/10.1145/274363.274364. |
58 | Guigue, P., Devillers, O. ((2003) ). Fast and robust triangle-triangle overlap test using orientation predicates. Journal of Graphics Tools, 8: (1), 25–32. https://doi.org/10.1080/10867651.2003.10487580. |
59 | Guo, H. ((2014) ). Modern Mathematics and Applications in Computer Graphics and Vision. World Scientific Publ., Singapore. 978-9814449328. https://doi.org/0.1142/8703. |
60 | Gupta, R., Tripathi, V.K., Singh, K., Pathak, N.K., Rastogi, R. ((2016) ). An innovative and easy approach for clipping curves along a circular window. In: 2016 Second International Conference on Computational Intelligence & Communication Technology (CICT), Ghaziabad, India, 2016, pp. 638–643. https://doi.org/10.1109/CICT.2016.132. |
61 | Harrington, S. ((1987) ). Computer Graphics: A Programming Approach, 2nd ed. McGraw-Hill, Inc., USA. 0070267537. |
62 | Hattab, A.S.A., Yusof, Y. ((2014) ). Line clipping based on parallelism approach and midpoint intersection. AIP Conference Proceedings, 1602: , 371–374. 9780735412361. https://doi.org/10.1063/1.4882513. |
63 | Havel, J., Herout, A. ((2010) ). Yet faster ray-triangle intersection (using SSE4). IEEE Transactions on Visualization and Computer Graphics, 16: (3), 434–438. https://doi.org/10.1109/TVCG.2009.73. |
64 | Hearn, D.D., Baker, M.P., Carithers, W. ((2010) ). Computer Graphics with OpenGL, 4th ed. Prentice Hall Press, USA. 0136053580. |
65 | Heckbert, P.S. (Ed.) ((1994) ). Graphics Gems IV. Academic Press Professional, Inc., USA. 0123361559. |
66 | Held, M. ((1998) ). ERIT: a collection of efficient and reliable intersection tests. Journal of Graphics Tools, 2: (4), 25–44. https://doi.org/10.1080/10867651.1997.10487482. |
67 | Hildenbrand, D. ((2012) ). Foundations of Geometric Algebra Computing. Springer Publishing Company, Inc., London. 3642317936. https://doi.org/10.1007/978-1-84628-997-2. |
68 | Hill, F.S., Kelley, S.M. ((2006) ). Computer Graphics Using OpenGL, 3rd ed. Prentice-Hall, Inc., USA. 0131496700. |
69 | Huang, W. ((2013) ). Line clipping algorithm of affine transformation for polygon. In: Intelligent Computing Theories, ICIC 2013, Lecture Notes in Computer Science, Vol. 7995: . Springer, Berlin, Heidelberg, pp. 55–60. https://doi.org/10.1007/978-3-642-39479-9_7. |
70 | Huang, W., Wangyong ((2009) ). A novel algorithm for line clipping. In: Proceedings – 2009 International Conference on Computational Intelligence and Software Engineering, CiSE 2009, pp. 1–5. https://doi.org/10.1109/CISE.2009.5366550. |
71 | Huang, Y.Q., Liu, Y.K. ((2002) ). An algorithm for line clipping against a polygon based on shearing transformation. Computer Graphics Forum, 21: (4), 683–688. https://doi.org/10.1111/1467-8659.00626. |
72 | Hughes, J.F., van Dam, A., McGuire, M., Sklar, D.F., Foley, J.D., Feiner, S.K., Akeley, K. ((2014) ). Computer Graphics – Principles and Practice, 3rd ed. Addison-Wesley, USA. 978-0-321-39952-6. |
73 | Iraji, M.S., Mazandarani, A., Motameni, H. ((2011) ). An efficient line clipping algorithm based on Cohen-Sutherland line clipping algorithm. American Journal of Scientific Research, 14: (1), 65–71. https://www.researchgate.net/publication/275964580_An_Efficient_Line_Clipping_Algorithm_based_on_Cohen-Sutherland_Line_Clipping_Algorithm. |
74 | Jiang, B., Han, J. ((2013) ). Improvement in the Cohen-Sutherland line segment clipping algorithm. In: 2013 IEEE International Conference on Granular Computing (GrC), Beijing, China, 2013, pp. 157–161. https://doi.org/10.1109/GrC.2013.6740399. |
75 | Jianrong, T. (2006). A new algorithm of polygon clipping against rectangular window based on the endpoint and intersection-point encoding. Journal of Engineering Graphics. |
76 | Johnson, M. ((1996) ). Proof by duality: or the discovery of “New” theorems. Mathematics Today, December: , 138–153. |
77 | Jokanovic, S. ((2019) ). Two-dimensional line segment–triangle intersection test: revision and enhancement. Visual Computer, 35: (10), 1347–1359. https://doi.org/10.1007/s00371-018-01614-1. |
78 | Kaijian, S., Edwards, J.A., Cooper, D.C. ((1990) ). An efficient line clipping algorithm. Computers and Graphics, 14: (2), 297–301. https://doi.org/10.1016/0097-8493(90)90041-U. |
79 | Kanatani, K. ((2015) ). Understanding Geometric Algebra: Hamilton, Grassmann, and Clifford for Computer Vision and Graphics. A. K. Peters, Ltd., USA. 1482259508. https://doi.org/10.1201/b18273. |
80 | Kirk, D. (Ed.) ((1992) ). Graphics Gems III. Academic Press Professional, Inc., USA. 0124096719. |
81 | Kodituwakku, R., Wijeweera, K.R. ((2012) ). An efficient line clipping algorithm for 3D space. International Journal of Advanced Research in Computer Science and Software Engineering, 2: (5). |
82 | Kodituwakku, S.R., Wijeweera, K.R., Chamikara, M.A.P. ((2013) ). An efficient algorithm for line clipping in computer graphics programming. Ceylon Journal of Science, 17: (1), 1–7. https://www.researchgate.net/publication/261288113_An_Efficient_Algorithm_for_Line_Clipping_in_Computer_Graphics_Programming. |
83 | Kolingerová, I. ((1994) ). 3D-line clipping algorithms – a comparative study. The Visual Computer, 11: (2), 96–104. https://doi.org/10.1007/BF01889980. |
84 | Kolingerová, I. ((1997) ). Convex polyhedron-line intersection detection using dual representation. Visual Computer, 13: (1), 42–49. https://doi.org/10.1007/s003710050088. |
85 | Konashkova, A.M. ((2014) ). Line – convex polyhedron intersection using vertex connections table. Applied Mathematical Sciences, 8: (21–24), 1177–1186. https://doi.org/10.12988/ams.2014.4133. |
86 | Konashkova, A.M. ((2015) ). Modified Skala’s plane tested algorithm for line-polyhedron intersection. Applied Mathematical Sciences, 9: (61–64), 3097–3103. https://doi.org/10.12988/ams.2015.52169. |
87 | Kong, D.H., Yin, B.C. (2001). The improvement on the algorithm of Cohen-Surtherland line clipping. CAD/GRAPHICS 2001, 807–810. 7-5062-5137-X. |
88 | Krammer, G. ((1992) ). A line clipping algorithm and its analysis. Computer Graphics Forum, 11: (3), 253–266. https://doi.org/10.1111/1467-8659.1130253. |
89 | Kui Liu, Y., Qiang Wang, X., Zhe Bao, S., Gomboši, M., Žalik, B. ((2007) ). An algorithm for polygon clipping, and for determining polygon intersections and unions. Computers and Geosciences, 33: (5), 589–598. https://doi.org/10.1016/j.cageo.2006.08.008. |
90 | Kumar, J., Awasthi, A. ((2011) ). Modified trivial rejection criteria in Cohen-Sutherland line clipping algorithm. In: Advances in Computing, Communication and Control. ICAC3 2011, Communications in Computer and Information Science, Vol. 125: . Springer, Berlin, Heidelberg, pp. 1–10. https://doi.org/10.1007/978-3-642-18440-6_1. |
91 | Kumar, P., Patel, F., Kanna, R. ((2018) ). An efficient line clipping algorithm for circular windows using vector calculus and parallelization. International Journal of Computational Geometry and Applications, 8: (1/2), 01–08. https://doi.org/10.5121/IJCGA.2018.8201. |
92 | Kuzmin, Y.P. ((1995) ). Bresenham’s line generation algorithm with built-in clipping. Computer Graphics Forum, 14: (5), 275–280. https://doi.org/10.1111/1467-8659.1450275. |
93 | Lagae, A., Dutré, P. ((2005) ). An efficient ray-quadrilateral intersection test. Journal of Graphics Tools, 10: (4), 23–32. https://doi.org/10.1080/2151237X.2005.10129208. |
94 | Landier, S. ((2017) ). Boolean operations on arbitrary polygonal and polyhedral meshes. CAD Computer Aided Design, 85: , 138–153. https://doi.org/10.1016/j.cad.2016.07.013. |
95 | Lengyel, E. ((2011) ). Mathematics for 3D Game Programming and Computer Graphics, 3rd ed. Course Technology Press, Boston, MA, USA. 1435458869. |
96 | Li, H. ((2016) ). Analysis and Implementation of Cohen_Sutherland Line Clipping Algorithm. In: Proceedings of the 2016 International Conference on Sensor Network and Computer Engineering. Atlantis Press, China, pp. 482–485. 978-94-6252-217-6. https://doi.org/10.2991/icsnce-16.2016.94. |
97 | Li, W. ((2005) ). Bisearch-based line clipping algorithm against a convex polygonal window. Journal of Computer-Aided Design and Computer Graphics, 17: (5), 962–965. |
98 | Li, Z., Lei, G. ((2012) ). Modified Sutherland-Cohen line clipping algorithm (in Chinese). Computer Engineering and Applications, 48: (34), 175. https://caod.oriprobe.com/articles/31582699/Modified_Sutherland_Cohen_line_clipping_algorithm.htm. |
99 | Li, Z.-Q., He, Y., Tian, Z.-J. ((2012) ). Overlapping area computation between irregular polygons for its evolutionary layout based on convex decomposition. Journal of Software, 7: (2), 485–492. https://doi.org/10.4304/jsw.7.2.485-492. |
100 | Li, Z., He, D., Wang, J., Wang, M. ((2014) ). An improved algorithm of Cohen-Sutherland line clipping. WIT Transactions on Information and Communication Technologies, 49: , 575–582. 9781845648558. |
101 | Liang, Y.-D., Barsky, B.A. ((1983) ). An analysis and algorithm for polygon clipping. Communications of the ACM, 26: (11), 868–877. https://doi.org/10.1145/182.358439. |
102 | Liang, Y.D., Barsky, B.A. ((1984) ). A new concept and method for line clipping. ACM Transactions on Graphics (TOG), 3: (1), 1–22. https://doi.org/10.1145/357332.357333. |
103 | Llanas, B., Sainz, F.J. ((2012) ). A local search algorithm for ray-convex polyhedron intersection. Computational Optimization and Applications, 51: (2), 533–550. https://doi.org/10.1007/s10589-010-9354-2. |
104 | Lo, S., Wang, W. ((2004) ). A fast robust algorithm for the intersection of triangulated surfaces. Engineering with Computers, 20: , 11–21. https://doi.org/10.1007/s00366-004-0277-3. |
105 | Lu, G., Wu, X. ((2002) ). Midpoint-subdivision line clipping algorithm based on filtering technique. Journal of Computer-Aided Design and Computer Graphics, 14: (6), 513–517. |
106 | Lu, G., Wu, X., Peng, Q. ((2002) a). An efficient line clipping algorithm based on adaptive line rejection. Computers and Graphics (Pergamon), 26: (3), 409–415. https://doi.org/10.1016/S0097-8493(02)00084-5. |
107 | Lu, G., Xing, J., Tan, J. ((2002) b). New clipping algorithm of line against circular window with multi-encoding approach. Journal of Computer-Aided Design and Computer Graphics, 14: (12), 1133–1137. |
108 | Mahovsky, J., Wyvill, B. ((2004) ). Fast ray-axis aligned bounding box overlap tests with plucker coordinates. Journal of Graphics Tools, 9: (1), 35–46. https://doi.org/10.1080/10867651.2004.10487597. |
109 | Maillot, P.-G. ((1991) ). Three-dimensional homogeneous clipping of triangle strips. In: Graphics Gems II. Elsevier Inc., USA, pp. 219–231. 9780080507545. https://doi.org/10.1016/B978-0-08-050754-5.50050-5. |
110 | Maillot, P.-G. ((1992) ). A new, fast method for 2D polygon clipping: analysis and software implementation. ACM Transactions on Graphics (TOG), 11: (3), 276–290. https://doi.org/10.1145/130881.130894. |
111 | Maonica, B., Das, P., Ramteke, P.B., Koolagudi, S.G. ((2017) ). Selective cropper for geometrical objects in OpenFlipper. In: Satapathy, S.C., Bhateja, V., Joshi, A. (Eds.), Proceedings of the International Conference on Data Engineering and Communication Technology. Springer, Singapore, pp. 391–399. 978-981-10-1675-2. https://doi.org/10.1007/978-981-10-1675-2_39. |
112 | Marschner, S., Shirley, P. ((2016) ). Fundamentals of Computer Graphics, 4th ed. A. K. Peters, Ltd., USA. 1482229390. |
113 | Martinez, F., Rueda, A.J., Feito, F.R. ((2009) ). A new algorithm for computing Boolean operations on polygons. Computers and Geosciences, 35: (6), 1177–1185. https://doi.org/10.1016/j.cageo.2008.08.009. |
114 | Matthes, D., Drakopoulos, V. ((2019) a). Another simple but faster method for 2D line clipping. International Journal of Computer Graphics & Animation (IJCGA), 9: (1–3). https://doi.org/10.5121/ijcga.2019.9301. https://aircconline.com/ijcga/V9N3/9319ijcga01.pdf. |
115 | Matthes, D., Drakopoulos, V. ((2019) b). A simple and fast line-clipping method as a scratch extension for computer graphics education. Computer Science and Information Technology, 7: , 40–47. https://doi.org/10.13189/csit.2019.070202. |
116 | Matthes, D., Drakopoulos, V. ((2022) ). Line clipping in 2D: overview, techniques and algorithms. Journal of Imaging, 8: (10). https://doi.org/10.3390/jimaging8100286. https://www.mdpi.com/2313-433X/8/10/286. |
117 | Mccoid, C., Gander, M.J. ((2022) ). A provably robust algorithm for triangle-triangle intersections in floating-point arithmetic. ACM Transactions on Mathematical Software, 48: (2). https://doi.org/10.1145/3513264. |
118 | McLaurin, D., Marcum, D., Remotigue, M., Blades, E. ((2013) ). Repairing unstructured triangular mesh intersections. International Journal for Numerical Methods in Engineering, 93: (3), 266–275. https://doi.org/10.1002/nme.4385. |
119 | Melero, F.J., Aguilera, A., Feito, F.R. ((2019) ). Fast collision detection between high resolution polygonal models. Computers and Graphics (Pergamon), 83: , 97–106. https://doi.org/10.1016/j.cag.2019.07.006. |
120 | Meriaux, M. ((1984) ). A two-dimensional clipping divider. In: Eurographics Conference Proceedings. https://doi.org/10.2312/eg.19841031. |
121 | Molla, R., Jorquera, P., Vivo, R. ((2003) ). Fixed-point arithmetic line clipping. In: WSCG ’2003 Proceedings, pp. 93–96. |
122 | Mortenson, M.E. ((1988) ). Computer Graphics: An Introduction to the Mathematics and Geometry. Industrial Press, Inc., USA. 0831111828. |
123 | Möller, T. ((1997) ). A fast triangle-triangle intersection test. Journal of Graphics Tools, 2: (2), 25–30. https://doi.org/10.1080/10867651.1997.10487472. |
124 | Möller, T., Trumbore, B. ((1997) ). Fast, minimum storage ray-triangle intersection. Journal of Graphics Tools, 2: (1), 21–28. https://doi.org/10.1080/10867651.1997.10487468. |
125 | Newman, W.M., Sproull, R.F. ((1979) ). Principles of Interactive Computer Graphics, 2nd ed. McGraw-Hill, Inc., USA. 0070463387. |
126 | Nicholl, T.M., Lee, D.T., Nicholl, R.A. ((1987) ). An efficient new algorithm for 2-D line clipping: its development and analysis. In: Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH 1987, pp. 253–262. https://doi.org/10.1145/37401.37432. |
127 | Nielsen, H.P. ((1995) ). Line clipping using semi-homogeneous coordinates. Computer Graphics Forum, 14: (1), 3–16. https://doi.org/10.1111/1467-8659.1410003. |
128 | Nisha, A. ((2017) a). Comparison of various line clipping algorithms: review. International Journal of Advanced Research in Computer Science and Software Engineering, 7: (1). https://doi.org/10.23956/ijarcsse/V7I1/0149. |
129 | Nisha, A. ((2017) b). A review: comparison of line clipping algorithms in 3D space. International Journal of Advanced Research (IJAR), 5: (1). https://doi.org/10.21474/IJAR01/3022. |
130 | Nishita, T., Johan, H. ((1999) ). A scan line algorithm for rendering curved tubular objects. In: Proceedings. Seventh Pacific Conference on Computer Graphics and Applications, Seoul, Korea (South), pp. 92–101. https://doi.org/10.1109/PCCGA.1999.803352. |
131 | Pandey, A., Jain, S. ((2013) ). Comparison of various line clipping algorithm for improvement. International Journal of Modern Engineering Research, 3: (1), 69–74. |
132 | Petrie, F., Mills, S. ((2020) ). Real time ray tracing of analytic and implicit surfaces. In: 2020 35th International Conference on Image and Vision Computing New Zealand (IVCNZ), Wellington, New Zealand, pp. 1–6. https://doi.org/10.1109/IVCNZ51579.2020.9290653. |
133 | Pharr, M., Jakob, W., Humphreys, G. ((2016) ). Physically Based Rendering: From Theory to Implementation, 3rd ed. Morgan Kaufmann Publishers Inc., San Francisco, CA, USA. 0128006455. |
134 | Platis, N., Theoharis, T. ((2003) ). Fast ray-tetrahedron intersection using plucker coordinates. Journal of Graphics Tools, 8: (4), 37–48. https://doi.org/10.1080/10867651.2003.10487593. |
135 | Raja, S.P. ((2019) ). Line and polygon clipping techniques on natural images – a mathematical solution and performance evaluation. International Journal of Image and Graphics, 19: (2). https://doi.org/10.1142/S0219467819500128. |
136 | Rajan, K., Hashemi, S., Karpuzcu, U., Doggett, M., Reda, S. ((2020) ). Dual-precision fixed-point arithmetic for low-power ray-triangle intersections. Computers and Graphics (Pergamon), 87: , 72–79. https://doi.org/10.1016/j.cag.2020.01.006. |
137 | Rappoport, A. ((1991) ). An efficient algorithm for line and polygon clipping. The Visual Computer, 7: (1), 19–28. https://doi.org/10.1007/BF01994114. |
138 | Ray, B.K. ((2012) a). An alternative algorithm for line clipping. Journal of Graphics Tools, 16: (1), 12–24. https://doi.org/10.1080/2151237X.2012.641824. |
139 | Ray, B.K. ((2012) b). A line segment clipping algorithm in 2D. International Journal of Computer Graphics, 3: (2), 51–76. |
140 | Ray, B.K. ((2014) ). A procedure to clip line segment. International Journal of Computer Graphics, 5: (1), 9–19. https://doi.org/10.14257/ijcg.2014.5.1.02. |
141 | Ray, B.K. ((2015) ). Line clipping against arbitrary polygonal window. International Journal of Computer Graphics, 6: (1), 12–24. https://doi.org/10.14257/ijcg.2015.6.1.01. |
142 | Reshetov, A. ((2017) ). Exploiting Budan-Fourier and Vincent’s theorems for ray tracing 3D Bézier curves. In: Proceedings of High Performance Graphics, HPG ’17. Association for Computing Machinery, New York, NY, USA. 9781450351010. https://doi.org/10.1145/3105762.3105783. |
143 | Reshetov, A. (2019). Cool patches: a geometric approach to ray/bilinear patch intersections. In: Ray Tracing Gems: High-Quality and Real-Time Rendering with DXR and Other APIs, pp. 95–109. 978-1-4842-4427-2. https://doi.org/10.1007/978-1-4842-4427-2_8. |
144 | Reshetov, A. ((2022) ). Ray/ribbon intersections. Proceedings of the ACM on Computer Graphics and Interactive Techniques, 5: (3). https://doi.org/10.1145/3543862. |
145 | Rivero, M., Feito, F.R. ((2000) ). Boolean operations on general planar polygons. Computers and Graphics (Pergamon), 24: (6), 881–896. https://doi.org/10.1016/S0097-8493(00)00090-X. |
146 | Rogers, D.F., Rybak, L.M. ((1985) ). On an efficient general line-clipping algorithm. IEEE Computer Graphics and Applications, 5: (1), 82–86. https://doi.org/10.1109/MCG.1985.276298. |
147 | Rogers, D.F., Adams, J.A. ((1989) ). Mathematical Elements for Computer Graphics, 2nd ed. McGraw-Hill, Inc., USA. 0070535299. |
148 | Roy, U., Dasari, V.R. ((1998) ). Implementation of a polygonal algorithm for surface–surface intersections. Computers & Industrial Engineering, 34: (2), 399–412. https://doi.org/10.1016/S0360-8352(97)00276-3. |
149 | Sabharwal, C., Leopold, J., McGeehan, D. ((2013) ). Triangle-triangle intersection determination and classification to support qualitative spatial reasoning. Polibits, 48: , 13–22. https://doi.org/10.17562/PB-48-2. |
150 | Sabharwal, C.L., Leopold, J.L. ((2015) ). A triangle-triangle intersection algorithm. Computers and Graphics, 5: (11), 27–35. https://doi.org/10.5121/csit.2015.51003. |
151 | Sabharwal, C.L., Leopold, J.L. ((2016) ). A generic design for implementing intersection between triangles in computer vision and spatial reasoning. In: Pal, R. (Ed.), Innovative Research in Attention Modeling and Computer Vision Applications. IGI Global, USA, p. 41. https://doi.org/10.4018/978-1-4666-8723-3.ch008. |
152 | Salomon, D. ((1999) ). Computer Graphics and Geometric Modeling, 1st ed. Springer-Verlag, Berlin, Heidelberg. 0387986820. |
153 | Salomon, D. ((2006) ). Transformations and Projections in Computer Graphics. Springer-Verlag, Berlin, Heidelberg. 1846283922. |
154 | Salomon, D. ((2011) ). The Computer Graphics Manual. Springer, USA, pp. 1–1496. 978-0-85729-885-0. https://doi.org/10.1007/978-0-85729-886-7. |
155 | Schneider, P.J., Eberly, D.H. ((2003) ). Geometric Tools for Computer Graphics, The Morgan Kaufmann Series in Computer Graphics. Morgan Kaufmann, San Francisco, pp. 1–1009. 978-1-55860-594-7. https://doi.org/10.1016/B978-1-55860-594-7.50025-4. |
156 | Segura, R.J., Feito, F.R. ((1998) ). An algorithm for determining intersection segment-polygon in 3D. Computers and Graphics (Pergamon), 22: (5), 587–592. https://doi.org/10.1016/s0097-8493(98)00064-8. |
157 | Sharma, M., Kaur, J. ((2016) ). An improved polygon clipping algorithm based on affine transformation. Advances in Intelligent Systems and Computing, 379: (1), 783–792. https://doi.org/10.1007/978-81-322-2517-1_75. |
158 | Sharma, N.C., Manohar, S. ((1992) ). Line clipping revisited: two efficient algorithms based on simple geometric observations. Computers and Graphics, 16: (1), 51–54. https://doi.org/10.1016/0097-8493(92)90071-3. |
159 | Sharma, N.C., Manohar, S. ((1993) ). Three dimensional line-clipping by systematic enumeration. (IFIP Transactions B: Computer Applications in Technology, 1: (9), 225–232. 0444815643. |
160 | Shen, H., Heng, P.A., Tang, Z. ((2003) ). A fast triangle-triangle overlap test using signed distances. Journal of Graphics Tools, 8: (1), 17–23. https://doi.org/10.1080/10867651.2003.10487579. |
161 | Shirley, P., Marschner, S. ((2009) ). Fundamentals of Computer Graphics, 3rd ed. A. K. Peters, Ltd., USA. 1568814690. |
162 | Singh, R., Lumar, A. ((2016) ). RJ-ASHI algorithm: a new polygon/line clipping algorithm for 2D space. International Journal of Advanced Research in Computer Science and Software Engineering, 6: , 215–219. |
163 | Skala, V. ((1989) ). Algorithms for 2D line clipping. In: Hansmann, W., Hopgood, F.R.A., Straßer, W. (Eds.), EG 1989 Proceedings. Eurographics Association, The Netherlands. https://doi.org/10.2312/egtp.19891026. |
164 | Skala, V. ((1990) a). Algorithms for clipping quadratic arcs. In: Chua, T.S., Kunii, T.L. (Eds.), CGI Proceedings. Springer, Tokyo, pp. 255–268. https://doi.org/10.1007/978-4-431-68123-6_16. |
165 | Skala, V. (1990b). Clipping Algorithm. Habilitation thesis. University of West Bohemia, Pilsen (partially in Czech). http://afrodita.zcu.cz/~skala/EDU-PUB/Habilitace-komplet.pdf. |
166 | Skala, V. ((1993) ). An efficient algorithm for line clipping by convex polygon. Computers and Graphics, 17: (4), 417–421. https://doi.org/10.1016/0097-8493(93)90030-D. |
167 | Skala, V. ((1994) ). O(lg N) line clipping algorithm in E2. Computers and Graphics, 18: (4), 517–524. https://doi.org/10.1016/0097-8493(94)90064-7. |
168 | Skala, V. ((1996) a). An efficient algorithm for line clipping by convex and non-convex polyhedra in E3. Computer Graphics Forum, 15: (1), 61–68. https://doi.org/10.1111/1467-8659.1510061. |
169 | Skala, V. ((1996) b). Line clipping in E2 with O(1) processing complexity. Computer Graphics (Pergamon), 20: (4), 523–530. https://doi.org/10.1016/0097-8493(96)00024-6. |
170 | Skala, V. ((1996) c). Line clipping in E3 with expected complexity O(1). Machine Graphics and Vision, 5: (4), 551–562. https://doi.org/10.48550/arXiv.2201.00592. |
171 | Skala, V. ((1996) d). Trading time for space: an O(1) average time algorithm for point-in-polygon location problem: theoretical fiction or practical usage? Machine Graphics and Vision, 5: (3), 483–494. |
172 | Skala, V. ((1997) ). A fast algorithm for line clipping by convex polyhedron in E3. Computers and Graphics (Pergamon), 21: (2), 209–214. https://doi.org/10.1016/s0097-8493(96)00084-2. |
173 | Skala, V. ((2004) ). A new line clipping algorithm with hardware acceleration. In: Proceedings of Computer Graphics International Conference, CGI, pp. 270–273. https://doi.org/10.1109/CGI.2004.1309220. |
174 | Skala, V. ((2005) ). A new approach to line and line segment clipping in homogeneous coordinates. Visual Computer, 21: (11), 905–914. https://doi.org/10.1007/s00371-005-0305-3. |
175 | Skala, V. ((2008) a). Barycentric coordinates computation in homogeneous coordinates. Computers and Graphics (Pergamon), 32: (1), 120–127. https://doi.org/10.1016/j.cag.2007.09.007. |
176 | Skala, V. ((2008) b). Intersection computation in projective space using homogeneous coordinates. International Journal of Image and Graphics, 8: (4), 615–628. https://doi.org/10.1142/S021946780800326X. |
177 | Skala, V. ((2010) ). Duality, barycentric coordinates and intersection computation in projective space with GPU support. WSEAS Transactions on Mathematics, 9: (6), 407–416. http://afrodita.zcu.cz/~skala/PUBL/PUBL_2010/2010_NAUN-journal.pdf. |
178 | Skala, V. ((2012) ). S-clip E2: a new concept of clipping algorithms. In: SIGGRAPH Asia Posters, SA ’12, pp. 1–2. https://doi.org/10.1145/2407156.2407200. |
179 | Skala, V. ((2013) a). Line-torus intersection for ray tracing: alternative formulations. WSEAS Transactions on Computers, 12: (7), 288–297. https://doi.org/10.48550/ARXIV.2301.03191. |
180 | Skala, V. ((2013) b). Summation problem revisited – more robust computation. In: 17th International Conference on Computers – Recent Advances in Computer Science CSCC ’13, pp. 56–64. 978-960-474-311-7. https://doi.org/10.48550/arXiv.2211.04402. |
181 | Skala, V. ((2014) ). Algorithms for line and plane intersection with a convex polyhedron with O(sqrt(N)) expected complexity in E3. In: SIGGRAPH Asia 2014 Posters, SA ’14. Association for Computing Machinery, New York, NY, USA. https://doi.org/10.1145/2668975.2668976. |
182 | Skala, V. ((2015) ). A new approach to line – sphere and line – quadrics intersection detection and computation. AIP Conference Proceedings, 1648: , 1–4. 9780735412873. https://doi.org/10.1063/1.4913058. |
183 | Skala, V. ((2020) ). Optimized line and line segment clipping in E2 and geometric algebra. Annales Mathematicae et Informaticae, 52: , 199–215. https://doi.org/10.33039/ami.2020.05.001. |
184 | Skala, V. ((2021) a). Efficient intersection computation of the Bezier and Hermite curves with axis aligned bounding box. WSEAS Transactions on Systems, 20: , 320–323. https://doi.org/10.37394/23202.2021.20.36. |
185 | Skala, V. ((2021) b). A new coding scheme for line segment clipping in E2. In: Computational Science and Its Applications – ICCSA 2021, Lecture Notes in Computer Science, Vol. 12953: , pp. 16–29. https://doi.org/10.1007/978-3-030-86976-2_2. |
186 | Skala, V. ((2021) c). A novel line convex polygon clipping algorithm in E2 with parallel processing modification. In: Computational Science and Its Applications – ICCSA 2021, Lecture Notes in Computer Science, Vol. 12953: . pp. 3–15. https://doi.org/10.1007/978-3-030-86976-2_1. |
187 | Skala, V. (2022). Clipping and Intersection Algorithms: Short Survey and References. arXiv: https://doi.org/10.48550/ARXIV.2206.13216. https://arxiv.org/abs/2206.13216. |
188 | Skala, V., Bui, D.H. ((2000) ). Faster algorithm for line clipping against a pyramid in E3. Machine Graphics and Vision, 9: (4), 841–850. https://doi.org/10.48550/arXiv.2201.00587. |
189 | Skala, V., Bui, D.H. ((2001) ). Extension of the Nicholls-Lee-Nichols algorithm to three dimensions. Visual Computer, 17: (4), 236–242. https://doi.org/10.1007/s003710000094. |
190 | Skala, V., Huy, B.D. ((2000) ). Two new algorithms for line clipping in E2 and their comparison. Machine Graphics and Vision, 9: (1/2), 297–306. https://doi.org/10.48550/arXiv.2201.00590. |
191 | Skala, V., Lederbuch, P. ((1996) ). A comparison of a new O(1) and the cyrus-beck line clipping algorithms in E2. In: Compugraphics’96: Fifth International Conference on Computational Graphics and Visualization Techniques. ACM, Portugal, pp. 281–287. 972-8342-01-2. https://dspace5.zcu.cz/handle/11025/11808. |
192 | Skala, V., Kolingerova, I., Blaha, P. ((1995) ). A comparison of 2D line clipping algorithms. Machine Graphics and Vision, 3: (4), 625–633. |
193 | Skala, V., Lederbuch, P., Sup, B. ((1996) ). A comparison of O(1) and Cyrus-Beck line clipping algorithm in E2 and E3. In: SCCG96 Conference Proceedings. Comenius University, Slovakia, pp. 17–44. https://doi.org/10.48550/arXiv.2111.07987. https://dspace5.zcu.cz/handle/11025/11806. |
194 | Slater, M., Barsky, B.A. ((1994) ). 2D line and polygon clipping based on space subdivision. The Visual Computer, 10: (7), 407–422. https://doi.org/10.1007/BF01900665. |
195 | Sobkow, M.S., Pospisil, P., Yang, Y.-H. ((1987) ). A fast two-dimensional line clipping algorithm via line encoding. Computers and Graphics, 11: (4), 459–467. https://doi.org/10.1016/0097-8493(87)90061-6. |
196 | Sproull, R.F., Sutherland, I.E. ((1968) ). A clipping divider. In: Fall Joint Computer Conference Proceedings, of the December 9–11, 1968, AFIPS ’68 (Fall, part I). Association for Computing Machinery, New York, NY, USA, pp. 765–775. 9781450378994. https://doi.org/10.1145/1476589.1476687. |
197 | Stolfi, J. ((1991) ). Oriented Projective Geometry. Academic Press Professional, Inc., USA. 0126720258. |
198 | Sun, C., Wang, W., Li, J., Wu, E. ((2006) ). Line clipping against a polygon through convex segments. Journal of Computer-Aided Design and Computer Graphics, 18: (12), 1799–1805. |
199 | Sutherland, I.E. (1972). Display windowing by clipping. Google Patents. https://patents.google.com/patent/US3639736A/en. |
200 | Sutherland, I.E., Hodgman, G.W. ((1974) ). Reentrant polygon clipping. Communications of the ACM, 17: (1), 32–42. https://doi.org/10.1145/360767.360802. |
201 | Tang, L.-L., He, Y.-J. ((2009) ). A linear time algorithm for the line clipping against concave polygon. In: Proceedings – 2009 International Conference on Information Engineering and Computer Science, ICIECS 2009, pp. 1–4. https://doi.org/10.1109/ICIECS.2009.5364626. |
202 | Theoharis, T., Platis, N., Papaioannou, G., Patrikalakis, N.M. ((2008) ). Graphics and Visualization: Principles & Algorithms, 1st ed. A. K. Peters/CRC Press, New York. https://doi.org/10.1201/b10676. |
203 | Thomas, A. ((2008) ). Integrated Graphics and Computer Modelling, 1st ed. Springer, London. 1848001789. |
204 | Tran, C.-H. (1986). Fast Clipping Algorithms for Computer Graphics. PhD thesis, University of British Columbia. https://doi.org/10.14288/1.0096928. https://open.library.ubc.ca/collections/ubctheses/831/items/1.0096928. |
205 | Tropp, O., Tal, A., Shimshoni, I. ((2006) ). A fast triangle to triangle intersection test for collision detection. Computer Animation and Virtual Worlds, 17: (5), 527–535. https://doi.org/10.1002/cav.115. |
206 | Van Wyk, C.J. ((1984) ). Clipping to the boundary of a circular-arc polygon. Computer Vision, Graphics, and Image Processing, 25: (3), 383–392. https://doi.org/10.1016/0734-189X(84)90202-0. |
207 | Vatti, B.R. ((1992) ). A generic solution to polygon clipping. Communications of the ACM, 35: (7), 56–63. https://doi.org/10.1145/129902.129906. |
208 | Vince, J. ((2009) ). Geometric Algebra: An Algebraic System for Computer Games and Animation, 1st ed. Springer, London. 1848823789. |
209 | Vince, J. ((2010) ). Introduction to the Mathematics for Computer Graphics, 3rd ed. Springer-Verlag, Berlin, Heidelberg. 1849960224. https://link.springer.com/book/10.1007/978-1-4471-6290-2#toc. |
210 | Vince, J. ((2012) ). Matrix Transforms for Computer Games and Animation. Springer, London. 1447143205. |
211 | Vince, J.A. ((2008) ). Geometric Algebra for Computer Graphics, 1st ed. Springer-Verlag TELOS, Santa Clara, CA, USA. 1846289963. https://doi.org/10.1007/978-1-84628-997-2. |
212 | Wang, H., Chong, S. ((2016) ). A high efficient polygon clipping algorithm for dealing with intersection degradation. Dongnan Daxue Xuebao (Ziran Kexue Ban)/Journal of Southeast University (Natural Science Edition), 46: (4), 702–707. https://doi.org/10.3969/j.issn.1001-0505.2016.04.005. |
213 | Wang, H., Wu, R., Cai, S. ((1998) a). A new algorithm for two-dimensional line clipping via geometric transformation. Journal of Computer Science and Technology, 13: (5), 410–416. https://doi.org/10.1007/bf02948499. |
214 | Wang, H., Wu, R., Cai, S. ((1998) b). New efficient line clipping algorithm based on geometric transformation. Ruan Jian Xue Bao/Journal of Software, 9: (10), 728–733. |
215 | Wang, J., Lu, G.-D., Peng, Q.-S., Wu, X.-H. ((2005) ). Line clipping against polygonal window algorithm based on the multiple virtual boxes rejecting. Journal of Zhejiang University: Science, 6: (Suppl 1), 100–107. https://doi.org/10.1631/jzus.2005.AS0100. |
216 | Wang, J., Cui, C., Gao, J. ((2012) ). An efficient algorithm for clipping operation based on trapezoidal meshes and sweep-line technique. Advances in Engineering Software, 47: (1), 72–79. https://doi.org/10.1016/j.advengsoft.2011.12.003. |
217 | Wang, X., Xue, Y., Fang, F., Chen, G. ((2001) ). From probability model to a fast line clipping algorithm. In: CAD/GRAPHICS 2001, pp. 802–806. |
218 | Watt, A. ((1993) ). 3d Computer Graphics, 2nd ed. Addison-Wesley Longman Publishing Co., Inc., USA. 0201631865. |
219 | Wei, L.-Y. ((2014) ). A faster triangle-to-triangle intersection test algorithm. Computer Animation and Virtual Worlds, 25: (5–6), 553–559. https://doi.org/10.1002/cav.1558. |
220 | Wei, W., Ma, P., Lin, W. ((2013) ). An improved Cohen-Sutherland region encoding algorithm. Applied Mechanics and Materials, 239–240: , 1313–1317. 9783037855454. https://doi.org/10.4028/www.scientific.net/AMM.239-240.1313. |
221 | Weiler, K. ((1980) ). Polygon comparison using a graph representation. In: Proceedings of the 7th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH ’80, pp. 10–18. https://doi.org/10.1145/800250.807462. |
222 | Weiler, K., Atherton, P. ((1977) ). Hidden surface removal using polygon area sorting. In: Proceedings of the 4th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH ’77, pp. 214–222. https://doi.org/10.1145/563858.563896. |
223 | Wijeweera, K.R., Kodituwakku, S.R., Pathum Chamikara, M.A. ((2019) ). A novel and efficient approach for line segment clipping against a convex polygon. Ruhuna Journal of Science, 10: (2), 161–173. https://doi.org/10.4038/rjs.v10i2.81. |
224 | Wikipedia (2020). Plücker Matrix – Wikipedia, The Free Encyclopedia. [Online; accessed 12-May-2022]. https://en.wikipedia.org/wiki/Plucker_matrix. |
225 | Wikipedia (2021a). Clipping (Computer Graphics) – Wikipedia, The Free Encyclopedia. [Online; accessed 28-July-2021]. https://en.wikipedia.org/wiki/Clipping_(computer_graphics). |
226 | Wikipedia (2021b). IEEE 754 – Wikipedia, The Free Encyclopedia. [Online; accessed 11-July-2021]. https://en.wikipedia.org/wiki/IEEE_754. |
227 | Wikipedia (2021c). Ray Tracing (Graphics) – Wikipedia, The Free Encyclopedia. [Online; accessed 3-August-2021]. https://en.wikipedia.org/wiki/Ray_tracing_(graphics). |
228 | Williams, A., Barrus, S., Morley, R.K., Shirley, P. ((2005) ). An efficient and robust ray-box intersection algorithm. In: ACM SIGGRAPH 2005 Courses. ACM, New York, NY, USA, p. 9. https://doi.org/10.1145/1198555.1198748. |
229 | Wu, Q., Huang, X., Han, Y. ((2006) ). A clipping algorithm for parabola segments against circular windows. Computers & Graphics, 30: (4), 540–560. https://doi.org/10.1016/j.cag.2006.03.001. https://www.sciencedirect.com/science/article/pii/S0097849306000732. |
230 | Wu, Y., Li, X. ((2022) ). Curve intersection based on cubic hybrid clipping. Visual Computing for Industry, Biomedicine, and Art, 5: (1). https://doi.org/10.1186/s42492-022-00114-3. |
231 | Wu, Z., Gou, C., Yang, D., Luo, Z. ((2004) ). Line clipping algorithm against arbitrary polygons. Journal of Computer-Aided Design and Computer Graphics, 16: (2), 228–233. |
232 | Xiao, L., Mei, G., Cuomo, S., Xu, N. ((2020) ). Comparative investigation of GPU-accelerated triangle-triangle intersection algorithms for collision detection. Multimedia Tools and Applications, 81: , 3165–3180. https://doi.org/10.1007/s11042-020-09066-3. |
233 | Xie, L., Li, P., Zhou, M., Wang, X. ((2010) ). An clipping general polygons in regular girds algorithm base on successive encoding. In: 2010 International Conference on Computer Application and System Modeling, ICCASM 2010, Taiyuan, 2010, pp. 4709–4713. https://doi.org/10.1109/ICCASM.2010.5619427. |
234 | Yang, W. ((1988) ). New approach to line clipping in computer graphics display. Zhongnan Kuangye Xueyuan Xuebao, 18: (1), 73–78. |
235 | Ye, X., Huang, L., Wang, L., Xing, H. ((2015) ). An improved algorithm for triangle to triangle intersection test. In: ICIA 2015 Proceedings, pp. 2689–2694. https://doi.org/10.1109/ICInfA.2015.7279740. |
236 | Zhang, M., Sabharwal, C.L. ((2002) ). An efficient implementation of parametric line and polygon clipping algorithm. In: Proceedings of the ACM Symposium on Applied Computing, pp. 796–800. https://doi.org/10.1145/508791.508945. |
237 | Zhang, Z., Fan, J., Xu, S., Chen, Z. ((2022) ). VCS optimization method of Vatti algorithm for polygon overlay and parallelization using GPU. Journal of Geo-Information Science, 24: (3), 437–447 (in Chinese). https://doi.org/10.12082/dqxxkx.2022.210409. |
238 | Zheng, J.L., Millham, C.B. ((1991) ). A linear programming method for ray-convex polyhedron intersection. Computers and Graphics, 15: (2), 195–204. https://doi.org/10.1016/0097-8493(91)90073-Q. |


