
Assumption-based argumentation for extended disjunctive logic programming and its relation to nonmonotonic reasoning
Abstract
The motivation of this study is that Reiter’s default theory as well as assumption-based argumentation frameworks corresponding to default theories have difficulties in handling disjunctive information, while a disjunctive default theory (ddt) avoids them. This paper presents the semantic correspondence between generalized assumption-based argumentation (ABA) and extended disjunctive logic programming as well as the correspondence between ABA and nonmonotonic reasoning approaches such as disjunctive default logic and prioritized circumscription. To overcome the above-mentioned difficulties of ABA frameworks corresponding to default theories, we propose an assumption-based framework (ABF) translated from an extended disjunctive logic program (EDLP) since an EDLP can be translated into a ddt. Our ABF incorporates explicit negation and the connective of disjunction “|” to Heyninck and Arieli’s ABF induced by a disjunctive logic program. In this paper, first, we show how arguments are constructed from disjunctive rules in our proposed ABF. Then, we show the correspondence between answer sets of an EDLP P and stable extensions of the ABF translated from P with trivialization rules. After defining rationality postulates, we show answer sets of a consistent EDLP are captured by consistent stable extensions of the translated ABF with no trivialization rules. Finally, we show the correspondence between ABA and disjunctive default logic (resp. prioritized circumscription). The relation between ABA and possible model semantics of EDLPs is also discussed.
1.Introduction
1.1.Background
Disjunctive information is often required in reasoning and argumentation to solve problems in our daily life. In nonmonotonic reasoning, Gelfond et al. [16] proposed disjunctive default logic as a generalization of Reiter’s default logic [27] to overcome problems of default logic in handling disjunctive information. To this end, they use the symbol “|” as the connective of disjunction in a disjunctive default theory instead of the classical “∨” used in a default theory, where
Example 1
Example 1(Kyoto protocol).
There are two candidates for an upcoming presidential election. The candidates had a debate in the capital. They were asked what measures are to be taken in order for the country to reach the Kyoto protocol objectives for reducing greenhouse gas emissions. The first candidate, a member of the purple party, argued that if she wins the election, she will reach the objectives by supporting investments in renewable energy. The second candidate, a member of the yellow party, argued that if she wins the election, she will reach the objectives by supporting sustainable farming methods. We have reasons to believe that, no matter which candidate wins the election, the Kyoto protocol objectives will be reached. If the purple candidate wins, she will support investments in renewable energy (
Beirlaen et al. [3] represented the information shown above in terms of the knowledge base
Moreover, regarding ABA as another structured argumentation system, Lehtonen et al. [19] recently presented the ABA framework instantiated with a propositional default theory. However the ABA framework corresponding to
Notice that the disjunctive information s.t. “one of the two candidates is going to win” is expressed by
In regard to the relation between assumption-based argumentation and (disjunctive) default logic, Bondarenko et al. firstly showed in [5, Theorem 3.16] that there is a one-to-one correspondence between extensions of Reiter’s default theory and stable extensions of the corresponding assumption-based framework (ABF,22 for short). This denotes that the expected result k of the Kyoto protocol problem shown above is never obtained from stable extensions of their ABF corresponding to
Recently, Heyninck and Arieli [18] proposed a generalized assumption-based framework induced by a disjunctive logic program (DLP), where disjunction using the connective “∨” in rule head as well as one kind of negation, i.e. negation-as-failure (NAF) are allowed to appear. Hence though their ABF induced by a DLP has a contrariness operator
In logic programming, EDLPs [15] were proposed by Gelfond and Lifschitz to extend DLPs for knowledge representation by not only allowing classical negation (i.e. explicit negation) along with negation-as-failure but also using “|” instead of “∨”. At the same time, it is shown in [16] that an EDLP can be embedded into a disjunctive default theory (ddt, for short) which uses “|” as the connective of disjunction. In contrast, in formal argumentation, generally an assumption-based framework is capable of containing explicit negation in its language [9,10,12], but the ABFs corresponding to Reiter’s default theories have difficulties in handling disjunctive information. To our best knowledge, however, there is no study to show the relationship between ABFs and EDLPs as well as the relationship between ABFs and ddts to overcome such difficulties of ABFs discussed above.
1.2.Purpose of this paper
The purpose of this paper is first to investigate the semantic relationship between ABFs and EDLPs as well as the relationships between ABFs and other approaches in nonmonotonic reasoning (e.g. disjunctive default logic [16], prioritized circumscription [20,23]) that have not been studied, and second to show how to construct an argument in ABFs from disjunctive rules in (E)DLPs. We use the answer set semantics [15] and the paraconsistent stable model semantics [28] of EDLPs neither of which is two-valued for characterizing stable extensions of ABFs translated from EDLPs.
Regarding ABFs whose languages contain explicit negation, however, we should pay attention to avoid consistency problems which sometimes have occurred in applications of argumentation due to explicit negation contained in the language. To this end, so far, rationality postulates [6] were proposed as principles which rule-based argumentation systems should satisfy to avoid anomalous outcomes. In fact, in structured argumentation systems such as ASPIC
As for recent ABA applications containing explicit negation, Schulz and Toni [31] proposed the approach of justifying answer sets of an extended logic program (ELP) using argumentation. In their approach, they used the ABA framework
Therefore, to achieve the above-mentioned purpose of this study, this paper proposes an assumption-based framework translated from an EDLP, which incorporates explicit negation as well as the connective “|” instead of “∨” in Heyninck and Arieli’s ABF induced by a DLP while avoiding consistency problems that arise in Schulz and Toni’s approach. Contributions of this study are as follows:
First, we define an argument in the ABF translated from a given EDLP which is constructed from disjunctive rules of the EDLP based on three inference rules provided in our ABF. Second, we show not only a one-to-one correspondence between p-stable models of an EDLP P and stable argument extensions (resp. stable assumption extensions) of the ABF translated from P but also a one-to-one correspondence between answer sets of an EDLP P and stable argument extensions (resp. stable assumption extensions) of the ABF translated from P with trivialization rules. Third, since our ABF incorporates explicit negation ¬, we define rationality postulates and consistency in our ABFs to avoid anomalous outcomes. Then we show answer sets of a consistent EDLP can be captured by consistent stable extensions of the translated ABF with no trivialization rules. This is useful for ABA applications containing explicit negation. Fourth, we show the new results about the relationship between ABA and disjunctive default logic [16] which enables us to overcome the difficulties of the ABF corresponding to a default logic in handling disjunctive information as well as the relationship between ABA and prioritized circumscription [20,23]. These results have not been shown so far to the best of our knowledge. Finally, we show how the possible model semantics of EDLPs [30] which is different from answer set semantics [15] is also captured by our ABFs translated from EDLPs. Appendix shows the correspondence between the semantics of ELPs [15,28] and stable assumption extensions of the associated ABA frameworks.
This paper is an extended and revised version of the paper [34], where not only Theorems 13, 14 and 15 in Section 4.1 but also Section 4.2, Section 5 and Appendix are newly introduced. Every proof sketch in [34] is replaced with a full proof while introducing new propositions, lemmas and two tables in this paper. Revisions are made throughout the paper and new considerations33 are often added. The rest of this paper is organized as follows. Section 2 shows preliminaries where new propositions proved in Appendix are mentioned. Section 3 presents an ABF translated from an EDLP, the definition of its argument, the semantic relationship between an EDLP and the corresponding ABF, the notion of consistency in ABFs, and the semantic relationship between a consistent EDLP and the corresponding consistent ABF. Section 4 shows the relationships between our proposed ABFs and nonmonotonic reasoning formalisms such as disjunctive default logic and prioritized circumscription. Section 5 shows the correspondence between the possible model semantics of EDLPs and ABA semantics of our ABFs. Section 6 discusses related work. Section 7 presents conclusions. Appendix contains new propositions relating ELPs and ABFs.
2.Preliminaries
2.1.Assumption-based argumentation
An ABA framework [5,9,10] is a tuple
Definition 1
Definition 1([10,11]).
Let
∙ the root is labelled by c,
∙ for every node N
- if N is a leaf then N is labelled by an assumption in
- if N is not a leaf and
∙ K is the set of all assumptions labelling the leaves.
∙ An argument
∙ For
A set of arguments
Let
Let
There is a one-to-one correspondence between σ argument extensions and σ assumption extensions.
Let claim
Rationality postulates [6] are stated in terms of ABA in [12] as follows.
Definition 2
Definition 2(Rationality postulates [12]).
Let
We say that a set of arguments
In [6], rationality postulates are defined using notions such as direct consistency, indirect consistency and closure-property. If we use the notions, it may be said that under σ argumentation semantics,
Heyninck and Arieli [18] proposed (generalized) assumption-based frameworks as follows. Let
A (propositional) logic for a language
Definition 3
Definition 3(Assumption-based frameworks [18]).
An assumption-based framework is a tuple
In
The usual semantics in AA frameworks [8] is adapted to their ABFs as follows.
Definition 4
Definition 4(ABF semantics [5]).
Let
2.2.Disjunctive logic programs
A disjunctive logic program (DLP) [26] is a finite set of rules of the form44
In [18], stable models of a DLP P are defined based on
The ABF induced by a DLP P is defined by ABF(
Proposition 1
Proposition 1([18, Proposition 2 and Proposition 3]).
Let P be a finite DLP and
2.3.Extended disjunctive logic programs
We consider a finite propositional extended disjunctive logic program (EDLP) [15] in this paper. An EDLP is a finite set of rules of the form:
The semantics of an EDLP is given by answer sets [15].
Definition 5
Definition 5(answer sets).
Let
(i) For each rule
(ii) If S contains a pair of literals L and
Second, let P be any EDLP. The reduct
An answer set S is consistent if
It is considered, for an answer set S and a literal L, (i)
A literal
The following example illustrates the difference between “|” and “∨” in logic programming.
Example 2.
The EDLP
The semantics of an EDLP is also given by (four-valued) paraconsistent stable models (or p-stable models66) [28], which are regarded as answer sets defined without the condition (ii) in Definition 5, denoting that we don’t get the trivialization or deductive explosion of inconsistent (p-stable) models.
Definition 6
Definition 6(p-stable models).
Let
In [28],
(i)
(iii)
A p-stable model M is inconsistent if M contains a pair of complementary literals (in other words, there exists a literal
Example 3.
Consider the EDLP
Gelfond et al. [16] proposed a disjunctive default theory (ddt, for short), which is a set of disjunctive defaults whose form is
The intuition behind the disjunctive default can be “if each of
The disjunctive defaults of this form are used to compute extensions of the ddt
Theorem 1
Theorem 1([16, Theorem 7.2]).
Let P be a propositional EDLP. Then S is an answer set of P iff S is the set of all literals from an extension of the disjunctive default theory
Let
Theorem 2
Theorem 2([32, Theorem 3]).
Let P be an ELP and
Theorem 3
Theorem 3([32, Theorem 4]).
Let P be an ELP and
For a consistent ELP, the following theorem holds.
Theorem 4
Theorem 4([33, Theorem 5]).
Let P be a consistent ELP and
Notice that
3.ABA for extended disjunctive logic programming
3.1.Assumption-based frameworks translated from EDLPs
We propose an assumption-based framework (ABF) translated from an EDLP, which incorporates explicit negation along with | instead of ∨ in Heyninck and Arieli’s ABF induced by a DLP to achieve our purpose shown in the introduction. An ABF translated from an EDLP is based on the logic constructed by three inference rules: Modus Ponens (MP), Resolution (Res) and Reasoning by Cases (RBC):
Definition 7.
We denote by
Remark 1.
Heyninck and Arieli’s ABF [18] is based on the logic
For a special ABF
In what follows, let
Definition 8.
Let P be an EDLP. The assumption-based framework (ABF) translated from P is defined by ABF(
In the following, we show the ABF translated from an EDLP P is always flat.
Proposition 2.
ABF(
Proof.
Let
In ABF(P), the semantics is given by assumption extensions as follows.
Definition 9.
Let ABF(
In ABF(P), consistency of a set of literals and NAF-literals
Definition 10.
Let ABF(
3.2.Correspondence between answer sets of an EDLP and stable assumption extensions
Proposition 1 for a DLP [18] is generalized to Proposition 4 and Proposition 5 for an EDLP shown below. To this end, firstly as the extension of Proposition 1, we prepare the following corollary for a DLP whose stable models are defined based on
Corollary 1.
The extended ABF induced by a DLP P is defined by ABF(
Proof.
Let
(i) Let M be a stable model of P, where
Thus Δ is conflict-free and attacks every
(ii) Conversely, let
On the other hand, based on [18, Corollary 1], it holds that, for a stable model M of P,
Thus it holds that,
Next, Corollary 1 for a DLP is mapped to Proposition 3 for an NDP based on two lemmas about DLPs and NDPs as follows.
Lemma 1.
Let P be a propositional NDP and
Proof.
Given
This is used in the following proof.
⇒: Suppose that
⇐: Suppose that
Though Lemma 1 holds, the difference between NDPs and DLPs appears when considering their relation to (disjunctive) default logic as shown in the following example. This implies that an NDP can be transformed to a disjunctive default theory but a DLP can never be done so.
Example 4.
Heyninck and Arieli considered the DLP
The following lemma is also needed to obtain Proposition 3 for an NDP.
Lemma 2.
Let
Proof.
Let
iff
Proposition 3.
Let P be an NDP,
Now, we show that p-stable models (resp. answer sets) of an EDLP P are captured by stable assumption extensions of the ABF translated from P (resp.
A positive form of an EDLP P [28] is the NDP
Lemma 3.
Let P be an EDLP and
Proposition 4.
Let ABF
If M is a p-stable model of P, then
Proof.
Let
(i) Let M be a p-stable model of an EDLP P. Then due to Lemma 3,
(ii) Conversely, let
Proposition 5.
Let P be an EDLP,
Proof.
[28, Theorem 3.5] shows that S is an answer set of an EDLP P iff S is p-stable model of
Lemma 4.
Let M be a p-stable model of an EDLP P and
Proof.
This follows from Lemma 2 based on the renaming technique used in the proof of Proposition 4. □
Proposition 6.
Let P be an EDLP, M (resp. S) be a p-stable model (resp. an answer set) of P, and
Proof.
1. Let M be a p-stable model of an EDLP P. Then for
2. Let S be an answer set of P. Then S is a p-stable model of
In all examples shown in this paper, we assume that
Example 5
Example 5(Cont. Example 1).
Consider Kyoto protocol problem. For the EDLP
Example 6.
Consider logic programs
3.3.Arguments and argument extensions in ABFs translated from EDLPs
Given an (E)DLP, it is impossible to capture its semantics by using arguments constructed based on Definition 1. The reason is as follows. For example, consider the EDLP
In what follows, arguments and attacks in the ABF translated from an EDLP P are defined.
Definition 11.
Let ABF(
Definition 12.
Let
1. The cases using no inference rules:
(1) For
(2) For a rule
2. The cases using inference rules:
(1) i. For a rule
ii. For a rule
(2) Let
where
(3) Let (
Then by [there is a tree
for each
Given ABF(P), the set of all trees
In ABF(P), an argument is defined as a special tree
Definition 13.
Let ABF(
∙ an argument for a conclusion (or claim) ϕ supported by
∙
Notation 1.
Given an EDLP P, we often use a unique name to denote an argument
Let
The semantics is also given by argument extensions in ABF(P) as follows.
Definition 14.
Let ABF
Example 7.
Consider the EDLP
Let
Definition 15.
Let ABF(
Theorem 5.
Let ABF
1. If
2. If
Proof.
In case
1. Let
Due to (i) and (ii),(i) Since
(ii) Since
2. Let
Due to (i) and (ii),(i)
(ii) Suppose there exists some assumption
When an ELP P with no disjunction is given, an argument
Proposition 7.
Let P be an ELP,
Proof.
We denote by
iff
iff
iff
iff
The following proposition denotes that, given an ELP, the same abstract argumentation framework is obtained regardless of whether arguments are constructed according to either Definition 1 or Definition 12.
Proposition 8.
Given an ELP P, the abstract argumentation (AA) framework generated from the ABA framework
Proof.
Given an ELP P, let
(1) Then,
iff there exists (
iff
(2)
iff there exist (
iff there exist (
iff (
iff a
3.4.Correspondence between answer sets of an EDLP and stable argument extensions
In ABF(P) translated from an EDLP P, the conclusion of a set of arguments
First of all, we show there is a one-to-one correspondence between answer sets of an NDP P and stable argument extensions of the ABF translated from P.
Theorem 6.
Let ABF(
Proof.
Let
which is needed below to prove the equivalences given in this theorem.
⇒: Let M be an answer set of an NDP P. Then there exists the stable assumption extension
⇐: Let
Based on Theorem 6, we show that there is a one-to-one correspondence between answer sets (resp. p-stable models) of an EDLP P and stable argument extensions of ABF(
Theorem 7.
Let ABF(
Proof.
Let
Moreover, due to Lemma 3,
On the other hand, based on Theorem 6 as well as (5), it holds that,
Hence from (6) and (7), it follows that, M is a p-stable model of an EDLP P iff there is a stable argument extension
Theorem 8.
Let P be an EDLP and ABF(
Proof.
The following (i) and (ii) hold according to [28, Theorem 3.5] and Theorem 7 respectively.
(i) S is an answer set of an EDLP P iff S is p-stable model of
(ii) S is a p-stable model of an EDLP
such that
Hence this theorem follows from both (i) and (ii). □
Theorems 7 and 8 for an EDLP are the generalization of Theorems 2 and 3 for an ELP respectively.
Example 8
Example 8(Cont. Example 1).
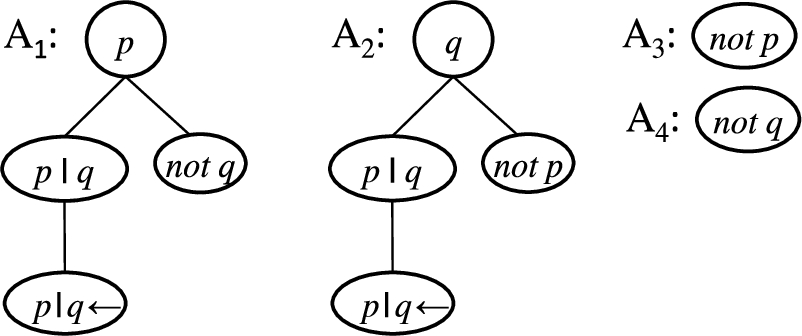
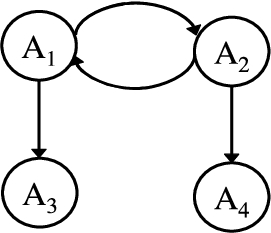
To solve the Kyoto protocol problem in argumentation, we construct ABF(
Then ABF(
where
for
Hence the expected result is successfully obtained since
On the other hand, under the grounded and ideal semantics as the skeptical semantics, ABF(
Example 9.
Consider the EDLP
In contrast, ABF(
Example 10.
Consider the EDLP
It has the unique answer set
Let ABF(
In contrast, ABF(
for the unique answer set S of
Remark 2.
In Example 8, [
3.5.Correspondence between answer sets of a consistent EDLP and consistent stable extensions
Rationality postulates are defined in ABF(P) translated from an EDLP P like Definition 2. In what follows, we show that such ABF(P) always satisfies the closure-property (or direct consistency postulate [6]) under the stable semantics.
Definition 16
Definition 16(Rationality postulates).
Given an EDLP P, ABF(
Theorem 9.
Let
(1)
(2)
iff for every
iff for every
Proof.
(1) Let M be a p-stable model of P and
Due to Lemma 4 and the transitive closure property of
Then, (9) means that
As a result, (8) leads to
Thus
(2)
iff for every
iff for every
iff for every
iff for every
(since every stable argument extension is not contradictory w.r.t.
Given an EDLP P, the notions of consistent argument extensions and consistency in ABF(P) are defined like [33, Definitions 6, 7] as follows.
Definition 17
Definition 17(Consistent argument extensions).
Given an EDLP P, let
Definition 18
Definition 18(Consistency in ABFs translated from EDLPs).
Given an EDLP P, ABF(
We show that there is a one-to-one correspondence between answer sets of a consistent EDLP P and the consistent stable argument extensions of ABF(P) translated from P, which is a generalization of Theorem 4 for a consistent ELP. To prove it, we provide the following lemma regarding a consistent EDLP.
Lemma 5.
Let P be an EDLP. M is a consistent answer set of P iff there is a consistent p-stable model M of P.
Proof.
⇐: Let S be a consistent p-stable model of P. Then S does not contain a pair of complementary literals. Since S is also a p-stable model of the reduct
⇒: The converse is proved in a similar way. □
Hereby given a consistent EDLP, we can obtain the following proposition and theorem.
Proposition 9.
Let P be a consistent EDLP and ABF(
Proof.
Suppose that S is an answer set of a consistent EDLP P. Then based on Definition 5, S is a consistent answer set of P, which means that S is a consistent p-stable model of P due to Lemma 5. Then corresponding to a p-stable model S of P which is consistent, there is a stable assumption extension
Theorem 10.
Let P be a consistent EDLP and ABF(
Proof.
Suppose that
Corollary 2.
Let P be a consistent EDLP. The following holds.
(1)
(2) ABF(
Proof.
(1) follows from Theorem 10 as well as Theorem 8 for a consistent EDLP P. (2) directly follows from (1). □
Example 11
Example 11(Innocent unless proved guilty).
Consider the EDLP
Let
Thus
In contrast, ABF(
Using ABF(
4.Relation to nonmonotonic reasoning
4.1.Correspondence between disjunctive default logic and assumption-based argumentation
A disjunctive default theory (ddt, for short) [16] is a set of disjunctive defaults of the form:
The semantics of a ddt is given by extensions defined as follows.
Definition 19
Definition 19([16, Definition 5.1]).
Let D be a disjunctive default theory, and let E be a set of sentences. E is an extension for D if it is one of the minimal deductively closed sets of sentences
The definition of an extension for a ddt are also described based on the concept of reduct [16]. To this end, a disjunctive rule of the form
Definition 20
Definition 20([16, Definition 5.2]).
Let D be a ddt and let E be a set of sentences. The reduct of D w.r.t. E, denoted
Using the reduct
Theorem 11
Theorem 11([16, Theorem 5.3]).
A set of sentences E is an extension for a ddt D if and only if E is a minimal set closed under propositional consequence and under the rules from
In what follows, we show the semantic relationship between ddts and assumption-based frameworks.
Theorem 12.
Let P be an EDLP and ABF(
S is the set of all literals from an extension of a disjunctive default theory
iff there is a stable argument extension
iff there is a stable assumption extension Δ of ABF(
Proof.
Based on Theorem 1 [16, Theorem 7.2], this theorem directly follows from Theorem 8 for an argument extension
For a consistent EDLP, the following theorem holds.
Theorem 13.
Let P be a consistent EDLP and ABF(P) be the ABF translated from P.
S is the set of all literals from an extension of a disjunctive default theory
iff there is a consistent stable argument extension
iff there is a consistent stable assumption extension Δ of ABF(P) such that
Given a nondisjunctive EDLP, i.e. an ELP P (resp. a consistent ELP P), Theorem 12 (resp. Theorem 13) also holds for the disjunctive default theory
Theorem 14.
Let P be an ELP and
S is the set of all literals from an extension of a default theory
iff there is a stable argument extension
iff there is a stable assumption extension Δ of the ABF
where
Proof.
Based on Theorem 1 [16, Theorem 7.2], this theorem directly follows from Theorem 3 for an argument extension
Theorem 15.
Let P be a consistent ELP and
S is the set of all literals from an extension of a default theory
iff there is a consistent stable argument extension
iff there is a consistent stable assumption extension Δ of the ABF
where
Proof.
Based on Theorem 1 [16, Theorem 7.2], this theorem directly follows from Theorem 4 for an argument extension
The following example shows that we can successfully obtain the expected result k of the Kyoto protocol problem based on our assumption-based framework corresponding to the ddt
Example 12
Example 12(Cont. Example 1).
The disjunctive default theory
4.2.Correspondence between prioritized circumscription and assumption-based argumentation
Circumscription [20,22,23] is a form of nonmonotonic reasoning, which was proposed to formalize the human commonsense reasoning under incomplete information. Commonsense knowledge including preferences is also often used in human argumentation. Then Bondarenko et al. showed in [5, Theorem 6.7] that Herbrand models of parallel circumscription can be captured by sets of assumptions of a corresponding assumption-based framework. Nonetheless, though preferences can be handled not in parallel circumscription but in prioritized circumscription, no study has shown a correspondence between the semantics of prioritized circumscription and the ABA semantics to the best of our knowledge. In what follows, we show new results about the relationships between them.
We first review the framework of circumscription. The following definition is due to [20]. Given a first order theory T, let P and Z be joint tuples of predicate constants from T, where P is a tuple of predicate constants
If P is decomposed into disjoint parts
The semantics of circumscription is given based on the preorder
For a structure M, let
Definition 21
Definition 21([20]).
Let
(i)
(ii)
(iii)
a.
b. For every
In a nutshell, the idea of the circumscriptive theory is that human nonmonotonic reasoning under incomplete knowledge (e.g. commonsense knowledge) with preferences is based on the most preferable models which are minimal ones w.r.t.
In this paper, we consider a first order theory T without function symbols. We assume that T is given by a set of clauses of the form:
Definition 22
Definition 22([29]).
Given
(1) For any clause in T of the form:
(2) For every clause in
(3) For any atom
The following theorem presents that there is a one-to-one correspondence between models of parallel circumscription and answer sets of
Theorem 16
Theorem 16([29]).
Let
Proposition 10.
Any answer set of an EDLP
Proof.
In
In [20, Theorem 2], the following equivalence is shown:
Based on (10), prioritized circumscription is transformed into an EDLP [35] as follows.
Definition 23
Definition 23([35, Definition 3.11]).
Given prioritized circumscription:
(1) According to (10), a given prioritized circumscription is represented by the conjunction of k parallel circumscriptions. So, let every ith
be transformed in such a way that all predicate symbols occurring in it are renamed by usingwhere(2)
(a) each
(b)
For any predicate u from
where u and
In what follows,
Theorem 17.
Let
Proof.
Let
-
-
-
-
-
- For a set S of literals, we say that S is consistent if S does not contain both p and
Then,
iff there is a consistent answer set
Hence, M is a model of
iff M is a model of
iff there is a consistent set
(due to (12))
iff there is a consistent answer set
iff there is a consistent answer set S of
Therefore thanks to Theorem 10, the semantics of prioritized circumscription (resp. parallel circumscription) can be captured by argumentation based on Theorem 17 (resp. Theorem 16) as follows.
Theorem 18.
Let
Then M is a model of
Proof.
Based on Theorem 16, Theorem 10, and Proposition 10,
M is a model of
iff there is a consistent stable argument extension
Theorem 19.
Let
Then M is a model of
Proof.
Based on Theorem 17 and Theorem 10,
M is a model of
iff there is a consistent answer set S of
iff there is a consistent stable argument extension
iff there is a consistent stable argument extension
(due to
Theorem 19 (resp. Theorem 17) indicates that reasoning in prioritized circumscription can be computed based on assumption-based argumentation (resp. answer set programming).
Example 13.
Consider prioritized circumscription given in [35, Example 3.9]:
where
Thus, models of
On the other hand, based on Theorem 19, these models are also obtained in argumentation as follows.
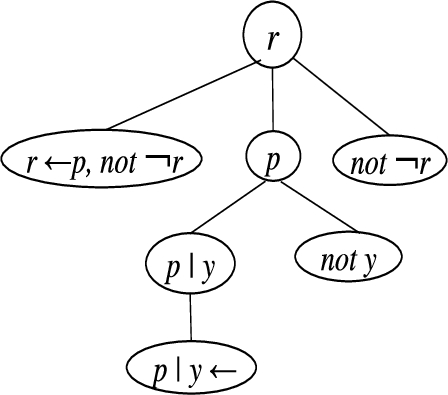
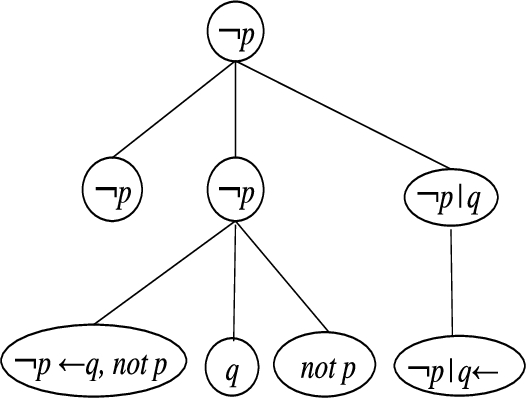
Consider ABF(
Fig. 5.
The graphic representation of arguments and
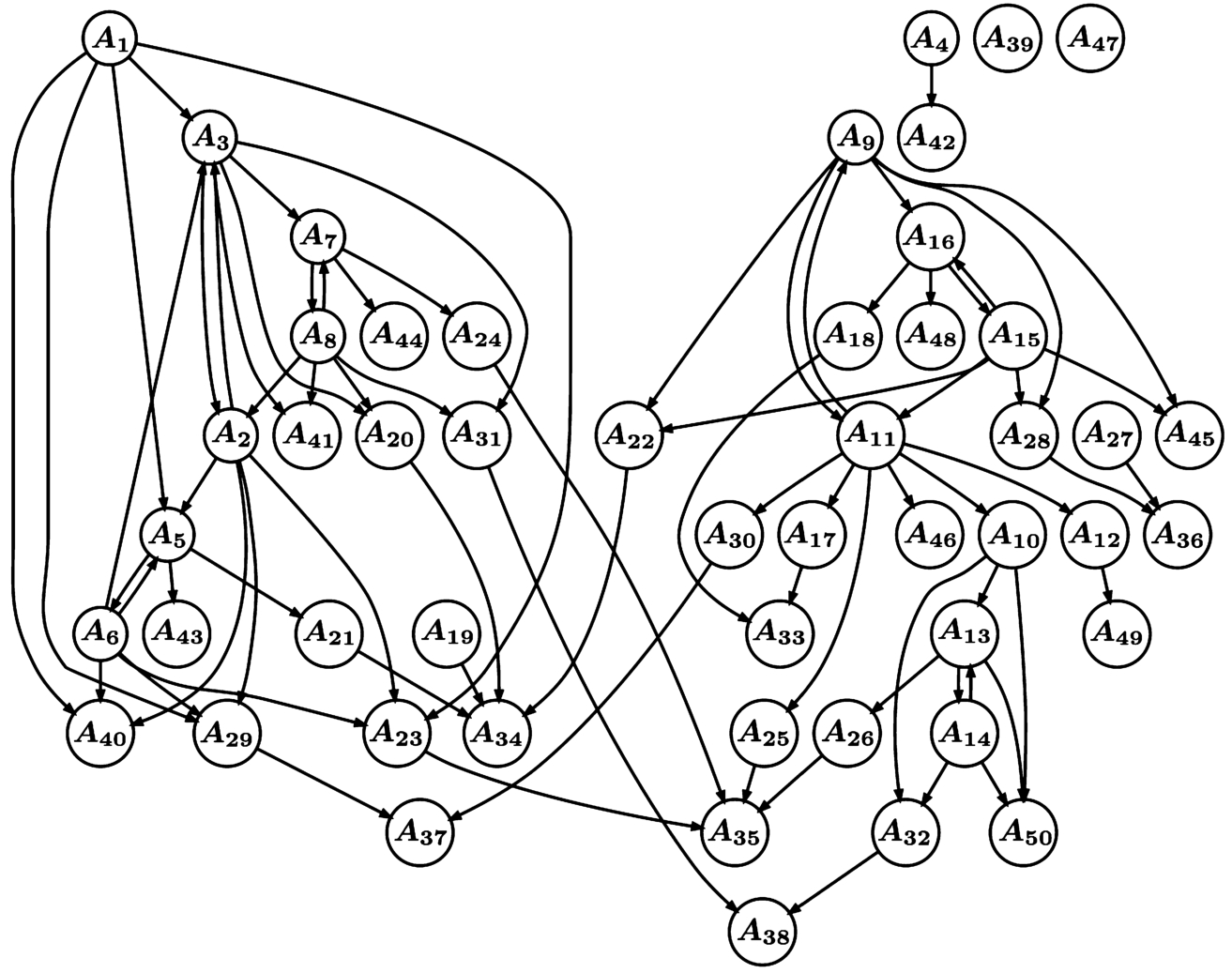
Fig. 5 shows the graphic representation of the AA framework generated from ABF(
ABF(
5.Relation to the possible model semantics of EDLPs
Minimality-based semantics interprets disjunctions as exclusive as possible as addressed in [30]. Instead, to freely specify both inclusive and exclusive interpretations of disjunctions, the possible model semantics of an EDLP was introduced by Sakama and Inoue [30].
In this paper, we restrict our attention to a consistent possible model which does not contain a pair of complementary literals L and
P has multiple split programs in general. Then, a consistent possible model of P is defined as a consistent answer set of a split program of P. It should be noticed that a possible model of P is not always minimal among possible models of P. Any consistent answer set of P is a consistent possible model of P but not vice versa [30]. An EDLP is consistent under the possible model semantics iff it has a consistent possible model; otherwise it is inconsistent.
The possible models of an EDLP can be captured by stable extensions of a standard ABA framework since each of its split programs is an ELP as follows.
Theorem 20.
Let P be an EDLP and
Proof.
S is a consistent possible model of P
iff there is a split program
(due to the definition of a consistent possible model)
iff there is a consistent stable argument extension
where
In what follows, we define an argument possible-extension (an argument p-extension, for short) and an assumption possible-extension (an assumption p-extension, for short) of ABF(P) which introduces the idea of possible models of an EDLP P in ABA.
Definition 24.
Let P be an EDLP,
Similarly, we say that Δ is a stable assumption possible-extension (or a stable assumption p-extension, for short) of ABF(P) if Δ is a stable assumption extension of ABF
Notice that only the inference rule
Proposition 11.
Let ABF(
Proof.
S is a consistent possible model of P
iff there is a split program
iff there is a consistent stable assumption extension
iff there is a consistent stable assumption p-extension
Theorem 21.
Let ABF(
Proof.
S is a consistent possible model of P
iff there is a consistent stable argument extension
extension
iff there is a consistent stable argument p-extension
where
For an EDLP P with no disjunction, Proposition 11 reduces to Proposition 14, while Theorem 21 reduces to Theorem 4 respectively.
The following example shows that there is a case that needs the inclusive interpretation of disjunction though Kyoto protocol problem in Section 1 needs the exclusive interpretation of the disjunction
Example 14
Example 14(Taxi fare problem).
Consider the following problem.
Each of Jack and Mary takes a taxi if it is available. Suppose that a taxi is available, where its fare is v dollars. If they share it, each may pay only the half of v (say hv) for a taxi fare; otherwise anyone who takes it should pay v dollars.
This situation can be represented by the following EDLP
On the other hand,
In contrast, the same goes for argumentation under the stable semantics. First we construct ABF(
6.Related work
Beirlaen et al.’s extended ASPIC
Table 1
Correspondence between LP and ABA
| LP | ABA | ||
| Class | Semantics | Assumption extensions | Argument extensions |
| ELP | p-stable models | Proposition 12 | Theorem 2 [32] |
| answer sets | Proposition 13 Proposition 14 | Theorem 3 [32] Theorem 4 [33] | |
| DLP | stable models | Proposition 1 [18] | |
| NDP | answer sets | Proposition 3 | Theorem 6 |
| EDLP | p-stable models | Proposition 4 | Theorem 7 |
| answer sets | Proposition 5 Proposition 9 | Theorem 8 Theorem 10 | |
| possible models | Proposition 11 | Theorem 21 | |
Table 2
Correspondence between NMR and ABA
| NMR | EDLP | ABA | |
| Formalisms | Semantics | Answer sets | Argument extensions |
| disjunctive default theory | extensions | Theorem 1 [16] | Theorem 12 Theorem 13 |
| parallel circumscription | models | Theorem 16 [29] | Theorem 18 |
| prioritized circumscription | models | Theorem 17 | Theorem 19 |
Lehtonen et al. [19] presented algorithms for reasoning in a default logic instantiation of ABA, where they defined the assumption-based argumentation framework (ABF) corresponding to a propositional default theory. In [19, Example 1], they showed the ABF corresponding a default theory which contains disjunctive formulas. However when the ABF corresponding to the default theory
Bondarenko et al. [5] showed a correspondence between Reiter’s default extensions and stable extensions of the corresponding assumption-based framework (ABF) in [5, Theorem 3.16]. This indicates that Kyoto protocol problem shown in Example 1 cannot be solved under the stable semantics in their ABF corresponding to the default theory
Caminada and Schulz [7] showed the equivalence between various ABA semantics and various semantics of NLPs. NLPs prohibiting both disjunction and classical negation are less expressive than DLPs and ELPs. Hence a faithful modeling of real world problems often becomes impossible in the scope of NLPs.
7.Conclusion
We proposed an assumption-based framework (ABF) translated from an extended disjunctive logic program (EDLP), which incorporates explicit negation as well as | rather than ∨ in Heyninck and Arieli’s ABF induced by a DLP. Thanks to our proposed ABFs, the new results about the semantic relationships between logic programming (LP) and ABA as well as nonmonotonic reasoning (NMR) and ABA are obtained. That is, as for LP, the answer set semantics of an EDLP can be captured by the stable extensions of the ABF translated from an EDLP with trivialization rules, while as for NMR, extensions of a disjunctive default theory (resp. models of prioritized circumscription) can be captured by the stable extensions of the ABF translated from the EDLP corresponding to a given disjunctive default theory (resp. the EDLP corresponding to a given prioritized circumscription). Moreover, as another relationship to LP, it is shown that the possible model semantics of an EDLP is captured by the possible extensions under stable semantics of the ABF translated from an EDLP (see Table 1 and Table 2).
In the study of nonmonotonic reasoning, disjunctive default logic [16] was proposed as a generalization of default logic [27] to overcome difficulties of default logic in handling disjunctive information. In fact, defaults do not work in the default theory
To sum up, as for argument extensions, Theorem 2 [32, Theorem 3] and Theorem 3 [32, Theorem 4] for an ELP (resp. Theorem 4 [33, Theorem 5] for a consistent ELP) in standard ABA frameworks are broadened to Theorem 7 and Theorem 8 for an EDLP (resp. Theorem 10 for a consistent EDLP) in generalized ABA frameworks, i.e. ABFs translated from EDLPs. Similarly as for assumption extensions, Proposition 12 and Proposition 13 (resp. Proposition 14) for the standard ABA framework instantiated with an ELP (resp. a consistent ELP) as well as Proposition 1 [18, Proposition 2 and Proposition 3] for the ABF induced by a DLP are generalized to Proposition 4 and Proposition 5 (resp. Proposition 9) for the respective ABFs translated from EDLPs (resp. a consistent EDLP). These are summarized in Table 1.
As one of practical advantages of our approach, even if disjunctive information exists, we can directly use dialectic proof procedures [9,11] since the AA framework [8] can be generated from our ABF treating disjunctive information.
In (extended) disjunctive logic programming, the existence of disjunction generally increases the expressive power of logic programs while brings computational penalty [13]. By analogy, argumentation in ABFs translated from (E)DLPs increases the expressive power of ABF while it would introduce additional complexity. Hence, the analysis of complexity is left for future work. Moreover, our future work is to explore and find the more general correspondence between Assumption-based frameworks and disjunctive default theories without intervening EDLPs.
Notes
1 Semantically, the latter requires an extension to contain one of the two disjunctive terms, rather than the disjunction [16].
2 In this paper, we use the abbreviation “ABF” to primarily denote assumption-based framework but sometimes ABA framework in different approaches [5,10,18,19,32,33] though it may refer to the respectively defined framework based on ABA in each approach.
3 For example, the difference between DLPs and NDPs as shown in Eample 4, the interesting results under the skeptical semantics (e.g. grounded) in Example 8, and the relation between our ABF and a standard ABA as shown in Proposition 8, etc.
4 A disjunctive logic program (DLP) defined in this paper is different from a normal disjunctive logic program (NDP) defined in Section 2.3. This is because we later consider transformation to disjunctive default theories, in which not a DLP but an NDP can be transformed to a disjunctive default theory. Details about this are discussed in Example 4.
5 Gelfond and Lifschitz [15] use the symbol
6 In this paper, the term “p-stable models” is used not as an abbreviation of partial stable model semantics by Przymusinski [26] but as that of paraconsistent stable model semantics by Sakama and Inoue [28]. In [28], a p-stable model is defined for an EDLP whose rule head uses ∨ rather than |. However notice that, a p-stable model is defined regardless the connective of disjunction used in rule head (e.g. “∨”, “|”).
7 In [32],
8 For a set S,
10 This is depicted vertically in the inference rule of [
11 The dependency graph of an EDLP P is a directed graph where each literal is a node and where there is an edge from L to
12 It is said that a clause
13 In this study, any rule from an EDLP has the form (2). So if a rule r whose head is empty, i.e. “
14 A split program of an EDLP can be encoded by choice rules supported in recent ASP solvers (e.g. clingo) [21].
15 However, when the problem is expressed by the EDLP
Acknowledgements
The author would like to thank Chiaki Sakama and the anonymous reviewers of the paper for their valuable comments and suggestions.
Appendices
Appendix
AppendixNew theorems for an ELP
A.1.Correspondence between answer sets of an ELP and stable assumption extensions
We show the correspondence between p-stable models (resp. answer sets) of an ELP P and stable assumption extensions in the standard ABA framework
Lemma 6.
Let P be an ELP and
Proof.
It is proved in [5, p.80] using the inference rule (i.e. modus ponens) in [5, p.72, line 1] that
Now let
(i) Suppose that M is a p-stable model of an ELP P. Then
(ii) The converse is also proved in a similar way to (i). □
Proposition 12.
Let P be an ELP and
Proof.
Let M be a p-stable model of an ELP P. Due to Lemma 6, it holds that, for any
Conversely let
Proposition 13.
Let P be an ELP and
Proof.
(i) Suppose S is an answer set of an ELP P. Then due to [28, Theorem 3.5], S is a p-stable model of
For a consistent ELP, the following proposition holds.
Proposition 14.
Let P be a consistent ELP and
Proof.
For a p-stable model S of an ELP P, it holds that,
S is an answer set of a consistent ELP P
iff S is a consistent answer set of P
iff S is a consistent p-stable model of P
iff there is a stable assumption extension
where due to (16), it holds that
according to Definition 2
iff there is a consistent stable assumption extension
References
[1] | O. Arieli, A. Borg, J. Heyninck and C. Straßer, Logic-based approaches to formal argumentation, IfCoLog Journal of Logics and their Applications 8: (6) ((2021) ), 1793–1898. |
[2] | M. Beirlaen, J. Heyninck and C. Straßer, Reasoning by cases in structured argumentation, in: Proceedings of the 2017 ACM Symposium on Applied Computing, ACM, (2017) , pp. 989–994. |
[3] | M. Beirlaen, J. Heyninck and C. Straßer, A critical assessment of Pollock’s work on logic-based argumentation with suppositions, in: Proceedings of the 17th International Workshop on Non-monotonic Reasoning (NMR-2018), (2018) , pp. 63–72. |
[4] | R. Ben-Eliyahu and R. Dechter, Propositional semantics for disjunctive logic programs, Annals of Mathematics and Artificial Intelligence 12: (1–2) ((1994) ), 53–87. doi:10.1007/BF01530761. |
[5] | A. Bondarenko, P.M. Dung, R.A. Kowalski and F. Toni, An abstract, argumentation-theoretic approach to default reasoning, Artificial Intelligence 93: ((1997) ), 63–101. doi:10.1016/S0004-3702(97)00015-5. |
[6] | M. Caminada and L. Amgoud, On the evaluation of argumentation formalisms, Artificial Intelligence 171: (5–6) ((2007) ), 286–310. doi:10.1016/j.artint.2007.02.003. |
[7] | M. Caminada and C. Schulz, On the equivalence between assumption-based argumentation and logic programming, Journal of Artificial Intelligence Research 60: ((2017) ), 779–825. doi:10.1613/jair.5581. |
[8] | P.M. Dung, On the acceptability of arguments and its fundamental role in nonmonotonic reasoning, logic programming and n-person games, Artificial Intelligence 77: (2) ((1995) ), 321–358. doi:10.1016/0004-3702(94)00041-X. |
[9] | P.M. Dung, R.A. Kowalski and F. Toni, Dialectic proof procedures for assumption-based, admissible argumentation, Artificial Intelligence 170: (2) ((2006) ), 114–159. doi:10.1016/j.artint.2005.07.002. |
[10] | P.M. Dung, R.A. Kowalski and F. Toni, Assumption-based argumentation, in: Argumentation in Artificial Intelligence, Springer-Verlag, (2009) , pp. 199–218. doi:10.1007/978-0-387-98197-0_10. |
[11] | P.M. Dung, P. Mancarella and F. Toni, Computing ideal sceptical argumentation, Artificial Intelligence 171: ((2007) ), 642–674. doi:10.1016/j.artint.2007.05.003. |
[12] | P.M. Dung and P.M. Thang, Closure and consistency in logic-associated argumentation, Journal of Artificial Intelligence Research 49: ((2014) ), 79–109. doi:10.1613/jair.4107. |
[13] | T. Eiter and G. Gottlob, Complexity results for disjunctive logic programming and application to nonmonotonic logics, in: Logic Programming, Proceedings of the 10th International Symposium (ILPS-1993), MIT Press, (1993) , pp. 266–278. |
[14] | M. Gelfond and V. Lifschitz, The stable model semantics for logic programming, in: Logic Programming, Proceedings of the Fifth International Conference and Symposium (ICLP/SLP-1988), MIT Press, (1988) , pp. 1070–1080. |
[15] | M. Gelfond and V. Lifschitz, Classical negation in logic programs and disjunctive databases, New Generation Computing 9: ((1991) ), 365–385. doi:10.1007/BF03037169. |
[16] | M. Gelfond, V. Lifschitz, H. Przymusinska and M. Truszczynski, Disjunctive defaults, in: Proceedings of the 2nd International Conference on Principles of Knowledge Representation and Reasoning (KR-1991), (1991) , pp. 230–237. |
[17] | J. Heyninck and O. Arieli, On the semantics of simple contrapositive assumption-based argumentation frameworks, in: Proceedings of the Seventh International Conference on Computational Models of Argument (COMMA-2018), IOS Press, (2018) , pp. 9–20. |
[18] | J. Heyninck and O. Arieli, An argumentative characterization of disjunctive logic programming, in: Proceedings of the 19th EPIA Conference on Artificial Intelligence (EPIA-2019), (2019) , pp. 526–538. |
[19] | T. Lehtonen, J.P. Wallner and M. Järvisalo, Algorithms for reasoning in a default logic instantiation of assumption-based argumentation, in: Proceedings of the 9th International Conference on Computational Models of Argument (COMMA-2022), IOS Press, (2022) , pp. 236–247. |
[20] | V. Lifschitz, Computing circumscription, in: Proceedings of the Ninth International Joint Conference on Artificial Intelligence (IJCAI-1985), (1985) , pp. 121–127. |
[21] | V.W. Marek, I. Niemelä and M. Truszczynski, Logic programs with monotone abstract constraint atoms, Theory and Practice of Logic Programming 8: (2) ((2008) ), 167–199. doi:10.1017/S147106840700302X. |
[22] | J. McCarthy, Circumscription – a form of non-monotonic reasoning, Artificial Intelligence 13: ((1980) ), 27–39. doi:10.1016/0004-3702(80)90011-9. |
[23] | J. McCarthy, Applications of circumscription to formalizing commonsense knowledge, Artificial Intelligence 28: ((1986) ), 89–116. doi:10.1016/0004-3702(86)90032-9. |
[24] | S. Modgil and H. Prakken, The ASPIC+ framework for structured argumentation: A tutorial, Argument and Computation 5: (3) ((2014) ), 31–62. doi:10.1080/19462166.2013.869766. |
[25] | H. Prakken, An abstract framework for argumentation with structured arguments, Argument and Computation 1: (2) ((2010) ), 93–124. doi:10.1080/19462160903564592. |
[26] | T.C. Przymusinski, Stable semantics for disjunctive programs, New Generation Computing 9: ((1991) ), 401–424. doi:10.1007/BF03037171. |
[27] | R. Reiter, A logic for default reasoning, Artificial Intelligence 13: ((1980) ), 81–132. doi:10.1016/0004-3702(80)90014-4. |
[28] | C. Sakama and K. Inoue, Paraconsistent stable semantics for extended disjunctive programs, Journal of Logic and Computation 5: (3) ((1995) ), 265–285. doi:10.1093/logcom/5.3.265. |
[29] | C. Sakama and K. Inoue, Embedding circumscriptive theories in general disjunctive programs, in: Proceedings of the Third International Conference on Logic Programming and Nonmonotonic Reasoning (LPNMR-1995), (1995) , pp. 344–357. doi:10.1007/3-540-59487-6_25. |
[30] | C. Sakama and K. Inoue, Abductive logic programming and disjunctive logic programming: their relationship and transferability, Journal of Logic and Computation 44: (1–3) ((2000) ), 75–100. doi:10.1016/S0743-1066(99)00073-4. |
[31] | C. Schulz and F. Toni, Justifying answer sets using argumentation, Theory and Practice of Logic Programming 16: (1) ((2016) ), 59–110. doi:10.1017/S1471068414000702. |
[32] | T. Wakaki, Assumption-based argumentation equipped with preferences and its application to decision-making, practical reasoning, and epistemic reasoning, Journal of Computational Intelligence 33: (4) ((2017) ), 706–736. doi:10.1111/coin.12111. |
[33] | T. Wakaki, Consistency in assumption-based argumentation, in: Proceedings of the 8th International Conference on Computational Models of Argument (COMMA-2020), IOS Press, (2020) , pp. 371–382. |
[34] | T. Wakaki, Assumption-based argumentation for extended disjunctive logic programming, in: Proceedings of the 12th International Symposium on Foundations of Information and Knowledge Systems (FoIKS-2022), (2022) , pp. 35–54. |
[35] | T. Wakaki and K. Satoh, Compiling prioritized circumscription into extended logic programs, in: Proceedings of the Fifteenth International Joint Conference on Artificial Intelligence (IJCAI-1997), (1997) , pp. 182–187. |
[36] |


