
Structural constraints for dynamic operators in abstract argumentation
Abstract
Many recent studies of dynamics in formal argumentation within AI focus on the well-known formalism of Dung’s argumentation frameworks (AFs). Despite the usefulness of AFs in many areas of argumentation, their abstract notion of arguments creates a barrier for operators that modify a given AF, e.g., in the case that dependencies between arguments have been abstracted away that are important for subsequent modifications. In this paper we aim to support development of dynamic operators on formal models in abstract argumentation by providing constraints imposed on the modification of the structure that can be used to incorporate information that has been abstracted away. Towards a broad reach, we base our results on the general formalism of abstract dialectical frameworks (ADFs) in abstract argumentation. To show applicability, we present two cases studies that adapt an existing extension enforcement operator that modifies AFs: in the first case study, we show how to utilize constraints in order to obtain an enforcement operator on ADFs that is allowed to only add support relations between arguments, and in the second case study we show how an enforcement operator on AFs can be defined that respects dependencies between arguments. We show feasibility of our approach by studying the complexity of the proposed structural constraints and the operators arising from the case studies, and by an experimental evaluation of an answer set programming (ASP) implementation of the enforcement operator based on supports.
1.Introduction
In the last decades there has been a steady stream of advances in formal approaches to argumentation within artificial intelligence (AI) [4,19]. Central to many formal models in argumentation are argumentation frameworks (AFs) due to the work by Dung in 1995 [53]. AFs can be seen as a reasoning formalism that is both foundational and simple: AFs consist of abstract arguments and directed attacks (conflicts) between these arguments. The simplicity of AFs is an appealing quality, which is witnessed by the fact that several approaches use AFs as their core reasoning engine [22,23,28,45,54,85,86]. Reasoning in this way is done via instantiating AFs in a principled way such that the arguments capture what can be argued for, and the attacks cover ways in which the arguments are conflicting. Semantics of AFs provide different means of conflict handling, in order to find acceptable arguments. Importantly, semantics of AFs only rely on the abstract view of AFs, i.e., abstract arguments and their conflict relations suffice to find acceptable arguments from an argumentative point of view for many applications. By inspecting the content of acceptable arguments one can trace back concrete claims that are acceptable.
AFs are also prominent as a formal basis for an emergent topic in formal argumentation, namely that of dynamics of argumentation [10,34,44,48,52], which can partially also be attributed to the easy-to-grasp conceptual nature of AFs. The investigation of dynamics of argumentation arose naturally in the research community since argumentation is an inherently dynamic process of, e.g., posing arguments and counterarguments towards goals in a debate.
In their initial usage, AFs were applied on “static” forms of reasoning, i.e., reasoning in contexts that give rise to AFs that do not change. While the principles of dynamic scenarios are compatible with AFs, in that AFs can be dynamically adapted, care needs to be taken when utilizing AFs in a dynamic context. For instance, dynamic operations, if solely done on AFs, may miss certain dependencies between arguments that are apparent when considering the internal structure of the arguments, but which have been “abstracted away” during instantiation.
Example 1.
Consider two arguments,
While certain generalizations of AFs [31,39], particularly those that incorporate support relations, e.g., based on necessary supports [92], make it possible to explicate the apparently implicit support relation between
In this paper we argue that despite these drawbacks of AFs when utilizing them in dynamic operations, abstract argumentation formalisms, as introduced by Dung [53] and to which this special issue is dedicated, are still a very useful notion for studying dynamics of argumentation. We argue that existing dynamic operators, and new ones, can be augmented to incorporate key structural constraints. Our goal in this paper is to provide means with which dynamic operations on abstract arguments can be extended so that (i) certain structural constraints are taken into account and (ii) operators can still work on a convenient and (partial) abstract level.
Towards our goal, we view dynamic operations on abstract arguments (and their relations) as operators working in three layers: a semantic layer, a structural layer, and a syntax layer. In the first layer, a semantical change is specified by an operator. As a concrete example, consider extension enforcement as defined in [10]: given an AF and a set of arguments, the output is a modified AF whose semantics contains the given set of arguments as an extension. This operator finds interpretations as strategic moves in an argumentation [58]. Enforcement defines certain conditions on the semantics of the output (or, equivalently, constraints on the semantics of an output AF). On the structural side, extension enforcement specifies that the output AF shall be close to the input AF (via a defined notion of distance between input and output AF structures). Finally, syntactically, the operator requires that the output is, again, an AF.
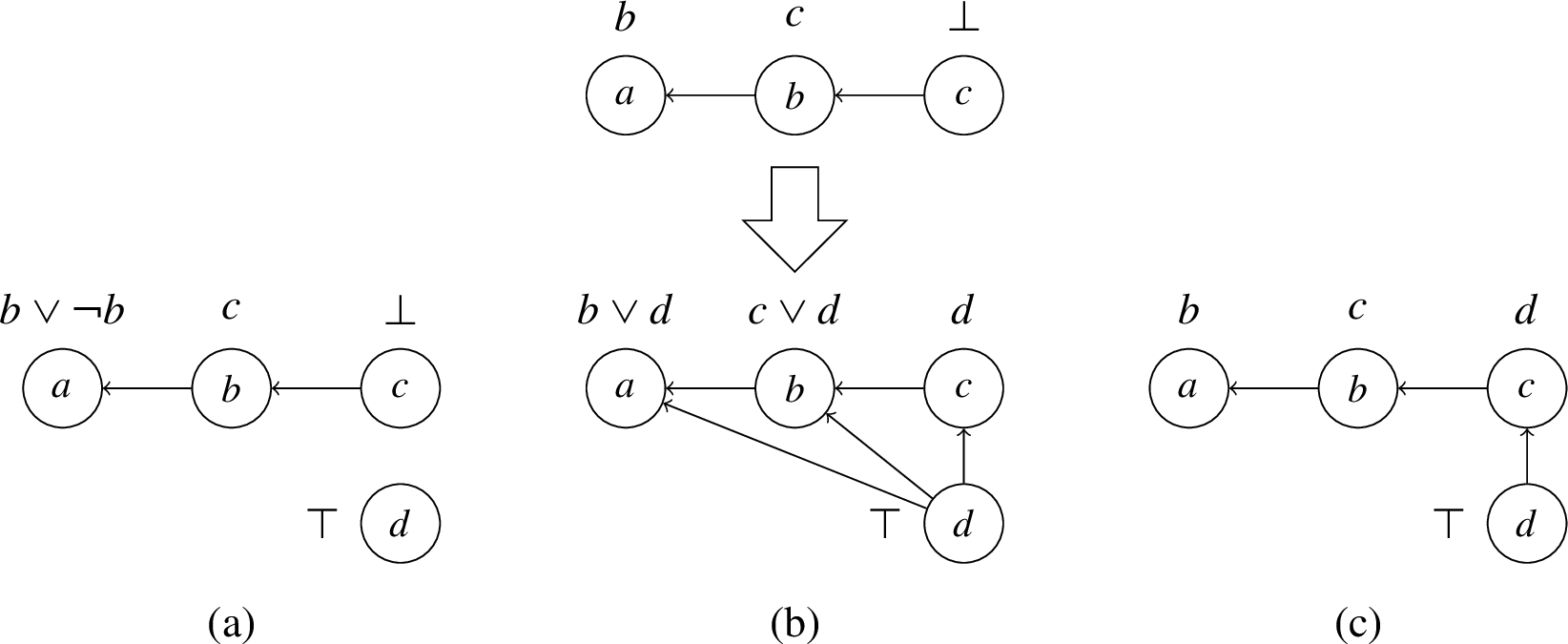
Fig. 1.
(a) Three layers for dynamic operators and (b) outcomes that satisfy constraints of each layer.
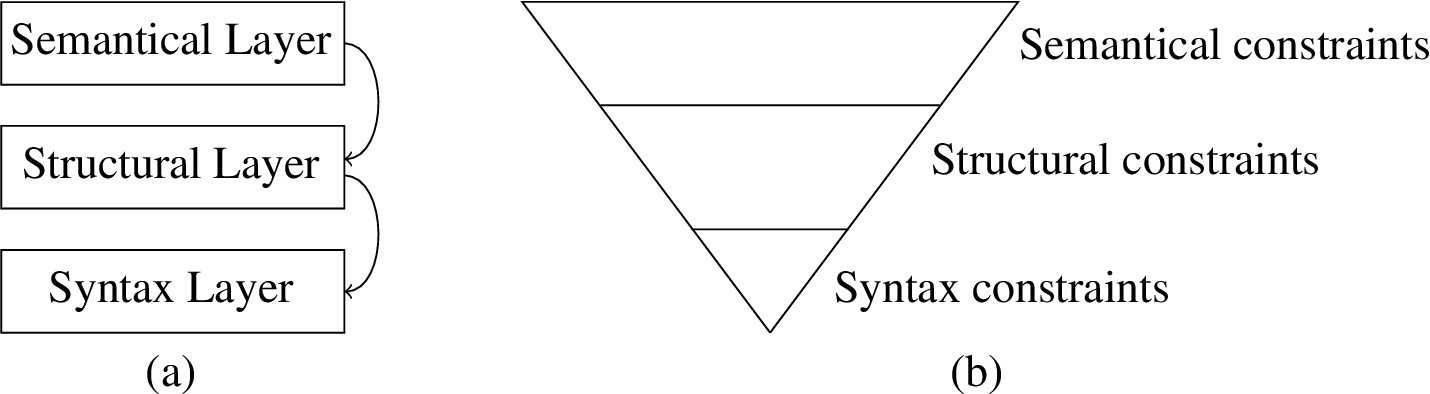
More broadly, we find that the semantical layer of a dynamic operator defines semantical constraints on the output, the structural layer specifies constraints on the structure of the output, and the syntax layer specifies the concrete syntax an output shall have. We illustrate this “workflow” in Fig. 1(a). Analogously, one can view each layer of an operator as (a set of) constraints, each constraining the possible candidate solutions, see Fig. 1(b). In the case of enforcement, the first layer constrains the set of candidate AFs to be those that satisfy the semantical constraint, then the second layer constrains to choose, among those satisfying the first layer, those structures that are close to the input.
With this article, we contribute to the second layer, the structural layer, by giving properties that can be required by an output structurally, with the aim of giving developers of dynamic operators a further handle to extend operators to cover more application scenarios. As the formal foundation, we use abstract dialectical frameworks (ADFs) [30,55] as the formal model that undergoes a change in this paper. Although ADFs are more complex than AFs, in the sense that the acceptance conditions of arguments can be specified in a liberal manner, they are still an abstract formalism with abstract arguments, and, importantly, have been shown to capture several abstract formalisms in argumentation in AI [95], and, thus, extend the reach of our contributions also to other formalisms than AFs.
To further our aim of supporting development of dynamic operators, we utilize the proposed constraints in two case studies. In the first case study we show how enforcement on AFs can be adapted to ADFs such that relations between arguments may only be modified in a way that corresponds to support between arguments, in contrast to attacks on AFs. In this way, we both aim to present a showcase of the constraints and show how to generalize existing dynamic operators on AFs to the more general setting of ADFs. Indeed, many dynamic approaches are currently restricted to AFs only. By using ADFs, and applying suitable structural constraints, one can lift current operators on AFs to ADFs, while keeping the intuitions of the operators.
In a second case study, we stay on the level of AFs, but adapt the existing enforcement operator to respect information of the instantiation. Concretely, for a general view on structured argumentation formalisms, we show how the constraints can be applied so that modifications to an AF do not miss interdependencies between arguments on their internal structure.
Since dynamic operators are, even without further constraints, often computationally hard [44,102], we study the complexity of the constraints we consider in this paper, and also the operators arising from the two case studies, in order to show which constraints can be feasibly “added” to operators. In order to have a clearer picture, we present an implementation in answer set programming (ASP) [29,71,88] and an empirical evaluation of the support enforcement on ADFs from the first case study. Our findings are that even when working in a more general abstract framework, and with complex constraints, state-of-the-art search engines (such as ASP) are capable of feasibly solving many instances up to certain sizes.
We summarize the main contributions of this article in the following.
To situate our proposal in more concrete terms, we first adapt an existing extension enforcement operator for AFs [9,10,44] to ADFs.
We give a list of structural constraints on ADFs, i.e., constraints on the structure of ADFs, exemplify their use for dynamics, and study some of their properties.
We give two case studies for the constraints and adaptions of extension enforcement: one enforcement operation on ADFs that deals with supports and one enforcement operation on AFs that respects internal structure of arguments.
To demonstrate feasibility, we show the theoretical complexity of checking whether an ADF satisfies the constraints, which is decidable in polynomial time in many cases, and we study the complexity of the operators arising from the case studies under admissible semantics.
We implemented a prototype of the enforcement operation on ADFs using supports based on the Diamond system [62,63], and performed an experimental evaluation, showing good performance for a variety of ADF instances.
The article begins with recalling background in Section 2 (AFs and ADFs) and Section 3 (enforcement). We present and exemplify structural constraints in Section 4, and proceed to the case studies in Section 5 and Section 6. Our analysis of complexity of constraints and case studies is presented in Section 7, and our prototype implementation and experiments in Section 8. We close with a discussion on further existing operators for which our constraints can be applied (Section 9) and on related work (Section 10). This article significantly extends the conference version [101] by expanded discussion and illustration, more formal details on the first case study, inclusion of the second case study, giving full proofs, and updated experiments.
2.Abstract argumentation frameworks
In this section we recall the basics of two well-known abstract argumentation frameworks, namely Dung’s argumentation frameworks (AFs) [53] and abstract dialectical frameworks (ADFs) [30]. There exists a whole range of abstract formalisms for argumentation, such as bipolar frameworks (BAFs) [3,36], extended argumentation frameworks (EAFs) [83], argumentation frameworks with recursive attacks (AFRAs) [6] and their subsequent extensions [35,40,65], value-based frameworks (VAFs) [18], and preference-based frameworks (PAFs) [2], to name some of the prominent formalisms, which are also surveyed in recent articles [31,39]. Our choice of AFs and ADFs is justified by AFs being the common core to all these other approaches, and that ADFs generalize (translate to) many other approaches [95].
2.1.Argumentation frameworks
We start the formal preliminaries with Dung’s argumentation frameworks (AFs) [53] and semantics for these frameworks [5]. An AF consists of a set of abstract arguments and directed attacks between these arguments.
Definition 1.
An argumentation framework (AF) is a pair
Example 2.
AFs have a natural representation as directed graphs. Consider an AF
A central notion towards the semantics of AFs is that of defense of arguments.
Definition 2.
Let
Semantics for argumentation frameworks are defined through a function σ which assigns to each AF
Table 1
Extensions of semantics σ from Example 2
| σ | |
Definition 3.
Let
It is well-known that for any AF F it holds that
2.2.Abstract dialectical frameworks
We recall ADFs from [30], which are based on earlier works [32]. We begin with basics from propositional logic and three-valued interpretations. Let A be a finite set of arguments (statements). An interpretation is a function I mapping arguments to one of the three truth values
For Boolean formulas φ we consider the classical connectives of logical conjunction “∧”, logical disjunction “∨”, logical negation “¬”, and material implication “→”. A two-valued interpretation I extends to the evaluation of a formula φ under I as usual, denoted by
For a formula φ and a three-valued interpretation I let
An interpretation I is equally or more informative than J, denoted by
Definition 4.
An ADF is a tuple
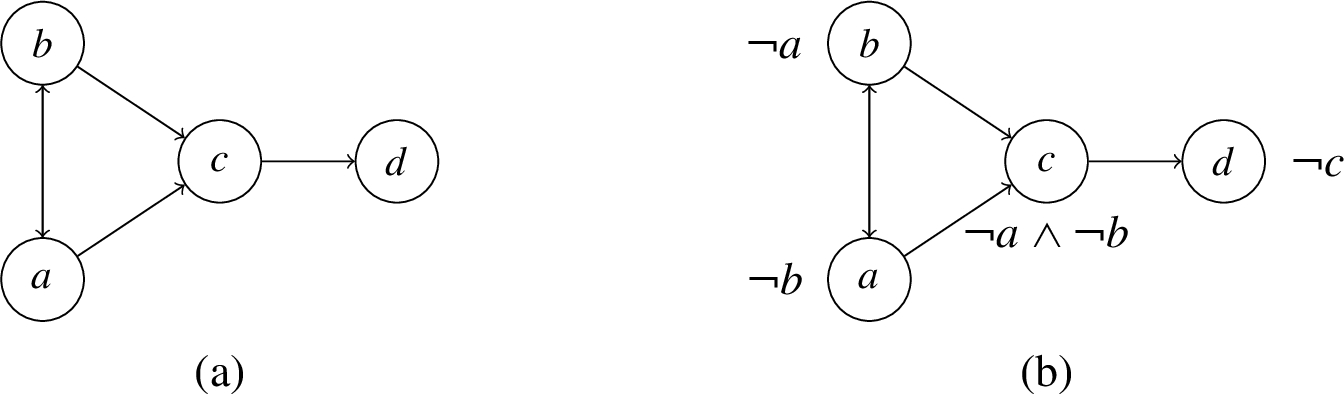
Example 4.
Fig. 2(b) shows an ADF
The semantics of ADFs are based on the characteristic function
Definition 5.
Let
Semantics of ADFs are defined in a similar fashion as for AFs, based on the characteristic function.
Definition 6.
Given an ADF D, an interpretation I
is admissible in D iff
is complete in D iff
is grounded in D iff I is the least fixed-point of
is preferred in D iff I is
We refer to the set of all admissible, complete, grounded, and preferred interpretations of an ADF D by
Example 5.
For the ADF from Example 4, the σ-interpretations are shown in Table 2. Admissible interpretations are not shown due to their number: there are 11 admissible interpretations for this ADF.
Table 2
Interpretations of semantics σ from Example 4
| σ | |
We will also make use of a fragment of ADFs, called bipolar ADFs. Towards the definition, we recall the notion of attacking and supporting relations, as specified in ADFs.11 Formally, we make use of an auxiliary notion: we denote the update of an interpretation I with truth value
Definition 7.
Let
supporting (in D) if for every two-valued interpretation I,
attacking (in D) if for every two-valued interpretation I,
Intuitively, if a link from a to b is attacking (supporting), then it cannot be the case that acceptance of a leads to a change of b’s status to that of being accepted (not accepted).
An ADF D is called bipolar (is a BADF) if each link
An AF
3.Enforcement on argumentation frameworks
Enforcement on AFs deals with the task of how to modify a given AF such that the modified AF satisfies certain semantical constraints. Usually also the number of modifications has to be minimum. Enforcement has been studied from several angles: possibility and impossibility results [9,10], representational aspects and use cases in a logical setting [25,51,58], computational aspects [44,90,102], and axiomatic studies [11,51,58,73].
Several variants of enforcement have been defined. For the purposes of this paper, we look at the enforcement variant called non-strict enforcement under strong expansions with a bounded number of expanded arguments [44]. This choice is mostly due to illustrative reasons; other variants fit the aims of the paper, as well. We base our results on this variant, since it is intuitively appealing: expansions relate to addition of arguments, with the strong variant indicating attacks originating only from new arguments. Compared to other operations studied, “strict” variants would place more restrictions on the semantic goal, and other types of expansions [8] have different restrictions which attacks may be added.
For an AF
Based on strong expansions, we define enforcement as follows.
Definition 8.
Let
for any
That is, one needs to find a modified AF
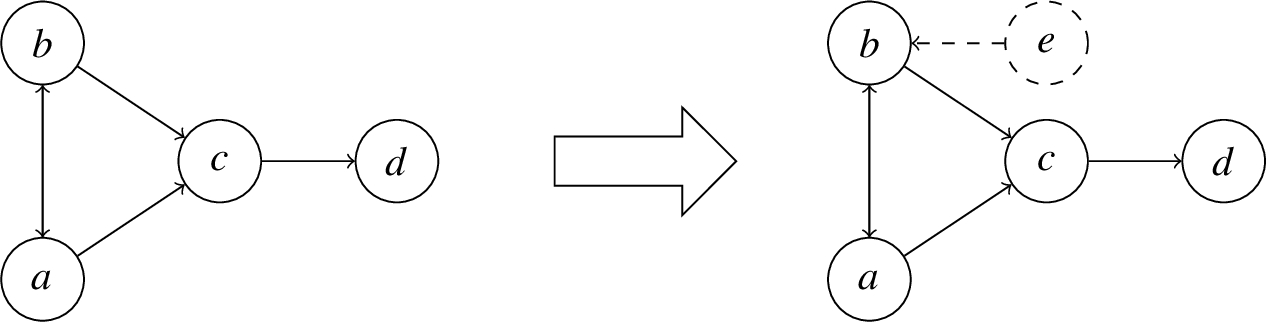
Example 6.
Consider the AF from Example 3. Say we want to enforce
Fig. 3.
Enforcing
4.Structural constraints for dynamic operators
This section introduces several constraints to be used to extend current dynamic operators, and support development of new operators. From a principled point of view, we consider dynamic operators that take an ADF D as input and produce a modified ADF
Definition 9.
Let
for any
That is, we want to enforce that I is “part” of a σ-interpretation by modifying D in the following way: there has to be a σ-interpretation
Within the three-layered view, this adapted enforcement operator works as follows:
(1) the semantical constraint specifies the “goal”, i.e., the arguments to be true/false in a σ-interpretation,
(2) the structural constraints state that only expansions of the original ADF may be considered (with possibly only considering optimal solutions), and
(3) a syntactical constraint stating that the output shall be an ADF (leaving the form of acceptance conditions, e.g., regarding normal forms, open).
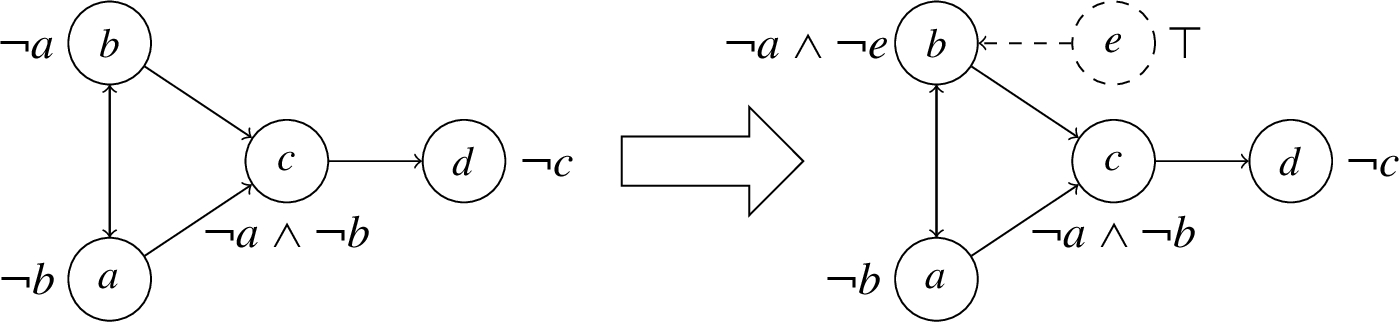
Example 7.
Consider again the ADF D from Example 4. Say we want to enforce that both a and d are true in the grounded interpretation. Further, say we may add only argument e. This means, we desire to enforce interpretation
Fig. 4.
Enforcing
We now proceed to introducing several structural constraints that are intended to refine candidate ADFs for a dynamic operator on ADFs. The enforcement operator defined above is one example for such an operator, but in the following we do not assume a concrete operator (however, we connect several constraints to the enforcement operator). Formally, a constraint c is specified in such a way that one can decide whether an ADF satisfies the constraint. The intention is then to choose, among all ADFs satisfying the given semantical constraints, e.g., from the ADF enforcement operator defined above, one ADF satisfying a given structural constraint c. Many of the subsequent constraints are intended to be used in a mix of several constraints. That is why we begin with defining how to state combinations of constraints.
Boolean combinations of constraints. In the following, when
General constraints. For concrete atomic constraints, we start with basic constraints, namely ones that specify limits of arguments and links. That is, for a given ADF
(G1)
(G2)
Argument constraints. The next basic constraint gives a concrete handle which arguments are present in the output. For an ADF
(A1)
Example 8.
Assume an enforcement operator that can expand the set of arguments, but the operator is not required to add all possible arguments (in contrast to the enforcement operator defined above). Say, that we can expand by arguments
(L1)
(L2)
(L3)
(L4)
Example 9.
Constraining the type of links can imply that the output ADF belongs to a proper sub-family of ADFs: if we require each link to be either attacking or supporting (via
If each link is constrained to be attacking and not supporting, then the output ADF belongs to the family of frameworks defined in [87], which we call SETAFs here, in case no acceptance condition is unsatisfiable. These SETAFs are similar to AFs, but sets of arguments attack an argument.
That ADFs with only attacking links and SETAFs have a connection has been established by a translation of SETAFs to ADFs [95]. That ADFs with only attacking links have a corresponding form as SETAFs, in case no acceptance condition is unsatisfiable, can be shown by considering that each acceptance condition in an attack-only ADF can be represented via a Boolean formula in conjunctive normal form with only negative literals. A similar result has been shown for BADFs in [61, Theorem 3.1.23]; we specialize this result to attack-only ADFs and state a direct proof for the sake of completeness.
Proposition 1.
If an ADF
Proof.
Let
From this result it can be inferred, via [78, Proposition 1], that if each acceptance condition is either equal to ⊤ or in CNF with negative literals, the ADF in question can be written as a SETAF. However, unsatisfiable conditions (
Example 10.
Constraining that the output
Constraining the underlying graph structure of an ADF, i.e.,
Constraints on acceptance conditions. We proceed to constraints on acceptance conditions. Given an ADF
(C1)
(C2)
(C3)
(C4)
Example 11.
Constraints of type (C2) can be used, e.g., to require the output ADF to belong to the subclass of AFs. Let
Another use case for the constraints is when considering the internal structure of arguments. If two structures of arguments are logically inconsistent, and this is to be expressed directly within acceptance conditions, the preceding attack-like constraint can be used as well.
Further, one can constrain supports. For instance, one can specify that supporting links are a kind of necessary support:
Another type of constraint that can be expressed is to require no change between certain dependencies between arguments. For instance, say an argument a has several parents in an original ADF and a new one (b) in a modified ADF. Further, we want to state that in the output ADF all dependencies from parents, except b, are unchanged if b is false. This can be written as
Constraints on characteristic functions. Next we introduce a different type of constraint on the characteristic functions of ADFs
(Char) for each three-valued interpretation I it holds that
Example 12.
A use case for this constraint is to state that two arguments cannot be both acceptable at the same time, even if there is no link between them. Consider
Weights and optimization. For optimization constraints, define the cost of an ADF D via
(O1)
(O2)
Example 13.
A straightforward way to define weights, and costs, is exemplified by the extension enforcement operation, where a modified attack contributes unit weight to the overall cost. That is, for an input ADF
5.Case study: An enforcement operator for ADFs based on supports
In this section we use some of the proposed constraints to adapt the enforcement operator on ADFs to allow for only supporting links to be added. For the sake of readability, we will continually develop this operator.
We adapt non-strict enforcement under strong expansions of ADFs, as defined in Definition 9. We briefly recall this operator. Given an ADF
Consider, first, a variant of this operator that respects the following constraint:
Example 14.
Consider ADF
Another potentially unintended example is when we desire to have an argument a false in an admissible interpretation of an expanded ADF. Say we have only one argument a, and may add argument b. The following modification can be applied:
Fig. 5.
Enforcing a being true in an admissible interpretation via support enforcement: without further constraints (a), without modifying acceptance conditions when expanded arguments are rejected (b), and additionally when optimizing added links (Example 14).
Let us utilize the structural constraints to specify permissible changes in a more rigorous way. Consider that acceptance conditions shall be unchanged if new arguments are rejected (similarly as in Example 11 and constraint type (C4)):
Example 15.
Continuing Example 14, under the new constraint, the modification shown in Fig. 5(a) is not allowed anymore. The reason for this is that the constraint just introduced is violated:
In light of the preceding example, in addition we now specify that the cost of a solution
Example 16.
Under the optimization constraint, an optimal solution, for enforcement of Example 14, would be to having d support c, by modifying the acceptance condition to
Finally, we specify that expanded arguments are always acceptable: for each
Additionally, this operator uses constraints of type (A1) and (L1) in order to specify expansions, and (O2) for the optimization. We call the corresponding operator that is defined via Definition 9 and respects these three constraints support enforcement.
Example 17.
Support enforcement can lead to rejection of arguments. Assume two arguments, a and b with
Support enforcement, however, is not always possible: assume that we want to enforce that a is false in an admissible interpretation. If
As the reader might have guessed, when looking at Example 16, support enforcement is possible if no argument is enforced to be false.
Proposition 2.
Let
Proof.
For any argument a that is assigned true by I one can modify the acceptance condition by
The preceding proposition implies straightforward solutions to the support enforcement for arguments to be enforced to be true. The same simple modification is not applicable for arguments to be enforced to be false: a direct support of a new argument onto such an argument can only lead to more cases of acceptance. In such a case, an indirect support of, e.g., an attacker can lead to a successful enforcement. In any case, while we abstain in the above definition from introducing further constraints to support enforcement, several further constraints can be feasibly added, such as constraints which links are allowed to be added, and how acceptance conditions may change. In Section 7, we investigate which further constraints can be added to support enforcement (or other operations) without increased computational complexity.
Further, if enforcement is possible (independently of whether arguments are to be true/false), for a concrete instance, then it is possible with a singleton argument to expand, whenever the interpretation that represents the enforcement goal assigns undecided to the expanded arguments (if two ore more expanded arguments must be true, then one cannot restrict to one expanded argument). Formally, if one can enforce the desired status among the original arguments, then one can do so, for the original arguments, with a single new argument.
Proposition 3.
Let
Proof.
Assume that
Consider now that
6.Case study: An enforcement operator for structured argumentation
In this section we will use our structural constraints to adapt the non-strict enforcement operator on AFs (Definition 8) to respect knowledge bases from structured argumentation the AF was instantiated from. On a high-level, the enforcement operator we define receives as input an AF instantiated by a part of a given knowledge base, and aims to find an expansion of that AF enforcing certain arguments, with expansions respecting the knowledge base. Formal approaches to structured argumentation are quite heterogeneous [7], which is why we abstract from these approaches, in order to capture the intuitions of several formalisms.
Structured argumentation approaches [21,22,28,68,72,85] provide formal recipes for instantiating arguments and their relationships from a given knowledge base. In several cases the formalism that is instantiated is an AF [28,85]. We assume that a knowledge base is given as a set B of elements. This set may contain facts, rules, or further ingredients required to instantiate arguments. In this paper we do not specify these elements. For our purposes we assume only a few functions that a structured argumentation approach is composed of: (i) a function
Example 18.
We exemplify the functions
Two main ingredients for ABA are assumptions and rules. Say we have four assumptions
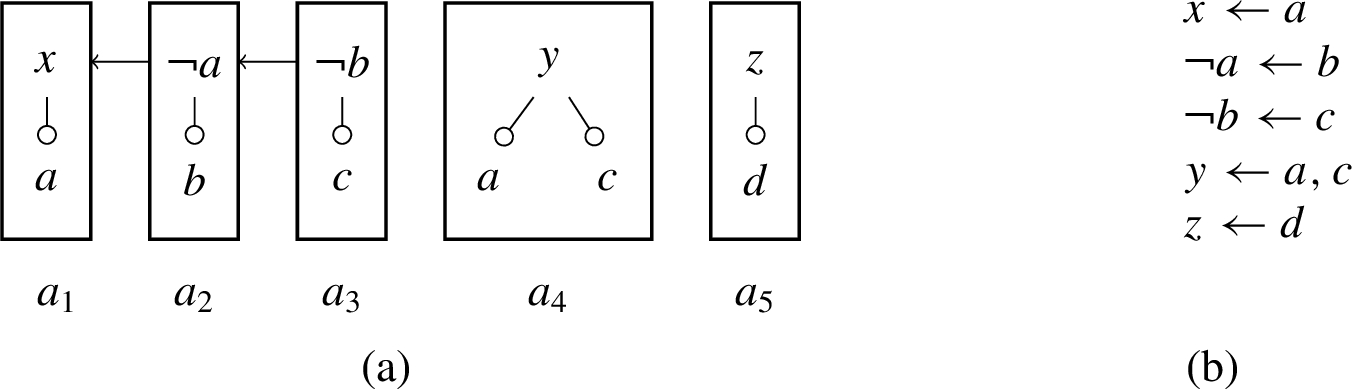
Fig. 6.
A simple structured (assumption-based) argumentation framework (Example 18). For the ABA framework consisting of four assumptions a, b, c, and d, and rules as shown in (b), several arguments can be constructed, with five arguments shown in (a). Attacks arise when an argument concludes a negated assumption of another argument (e.g., argument
In the following we assume that we are given both a knowledge base B, and an AF
The enforcement operator we now define aims to provide means to find a knowledge base
(1)
(2)
(3)
(4)
Definition 10.
Let B be a knowledge base and
Example 19.
Consider again Example 18 and the corresponding knowledge base B. Say we desire to enforce (via structured enforcement) argument
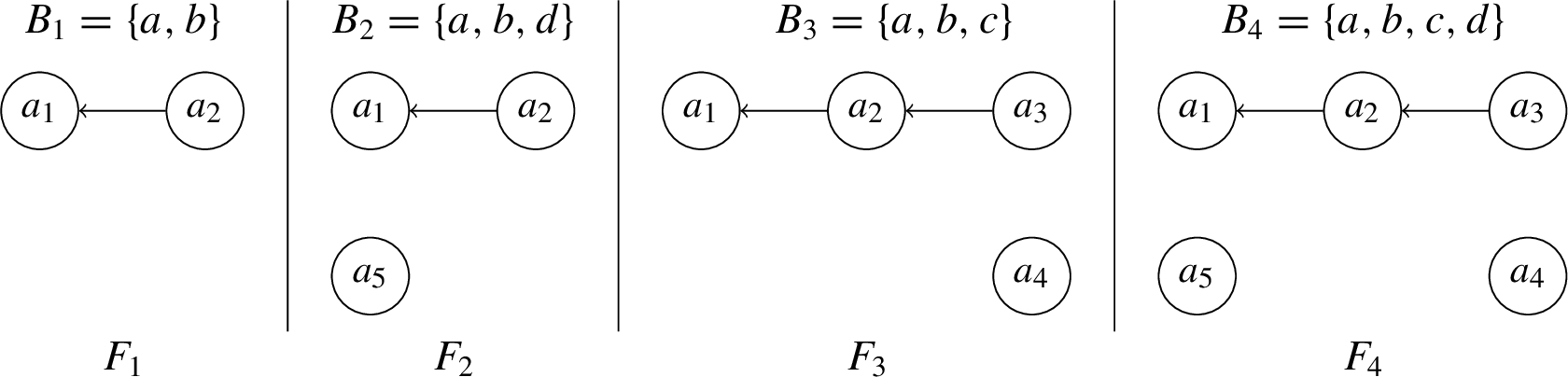
Fig. 7.
AFs associated to parts of the knowledge base that contain a and b (Examples 18 and 19). For each AF
Next we show that the structured enforcement operator behaves “well” regarding the given knowledge base. That is, if B is the full knowledge base and
Proposition 4.
Let B be a knowledge base,
if
Proof.
Recall that for any B we assume that
We close this section with some remarks on the structured enforcement operator. First, we note that there are cases when an AF corresponding to the whole knowledge base does not achieve that a desired set of arguments is part of an extension, but a subframework might. That is, when interpreting the structured enforcement as “disclosing” information, in form of AF expansion for part of a knowledge base, an agent may withhold information in its own knowledge base, but still achieve the enforcement goal. We exemplify this behavior in a simple example.
Example 20.
Assume a knowledge base B with the corresponding AF
Regarding the optimization statement, we have chosen to use the same optimization statement as for the (standard) AF enforcement operator, i.e., the number of modified attacks has to be minimum. Alternatives to that can also be considered, e.g., minimizing the number of added arguments, or the size of the underlying knowledge base, also possibly with weights attached to elements in the base. The latter optimization can be interpreted as minimizing what parts of a knowledge base one has to “expose” (if the setting is a multi-agent setting, for instance), in order to be equipped with the right arguments to utter in a debate and achieve an enforcement goal.
Further, constraint (3) is arguably not well suited in all cases, particularly when considering computational properties (there can be exponentially many such constraints). We discuss computational aspects in Section 7, including a more efficient representation of this constraint.
As a final remark, when the
7.Computational aspects
In this section we show complexity results for the considered constraints from Section 4, the support enforcement operator on ADFs from Section 5, and the structured enforcement operator from Section 6.
We make use of standard complexity classes for decision problems, which are problems that are answered either positively or negatively. Concretely, we use the classes P,
7.1.Complexity of satisfaction of the structural constraints
In this section we investigate the feasibility of the constraints. More concretely, we show the complexity of the task of verifying whether a given ADF satisfies certain constraints. This insight is important for developing dynamic operators that use such constraints. For instance, if we know that a certain constraint c can be checked in polynomial time, then a dynamic operator that constructs a candidate solution ADF can verify the constraint in polynomial time. If this algorithm is non-deterministic, then the complexity of the overall algorithm is likely to stay the same even if constraint c has to be considered, since a non-deterministic algorithm that runs in polynomial time can check a polynomial number of constraints that can be checked in polynomial time for a non-deterministically guessed object. In Fig. 8, we see a high-level view of such an algorithm: after parsing the input, a framework, e.g., an AF or ADF, is constructed. After that the constructed framework is verified, i.e., checked whether all semantical, structural, and syntactical constraints are met. If the framework is deemed sufficient, then it is returned in the last step. If we assume that the framework construction is done non-deterministically, then if all constraints can be checked in polynomial time, we arrive at an “
Fig. 8.
High-level view on dynamic algorithms.

There is evidence that dynamic operators in abstract argumentation are likely to be
A further benefit of having polynomial-time decidable constraints is that they can, usually, be incorporated more easily in implementations that make direct use of constraint languages, such as Boolean logic. In fact, many modern implementations of AF reasoning (dynamic or static) make use of solvers on Boolean logic, or variants thereof [37,38].
We begin analyzing the basic constraints, where polynomial-time decidability is immediate. For constraints of type (L4), the following results holds when the graph class is verifiable in polynomial time. We consider here directed acyclic graphs and bipartite graphs, as examples.
Proposition 5.
Verifying whether a given ADF satisfies constraints of type
is decidable in polynomial time.Proof.
Complexity of these constraints follows directly: checking constraints (G1), (G2), (A1), (L1) amount to check membership in a given set, checking constraint (L4) requires verifying whether the graph structure of the ADF is acyclic or bipartite (both can be decided in polynomial time), checking constraint (C1) amounts to evaluating a Boolean formula under a two-valued interpretation, and checking constraint (C3) requires checking equal syntax of two Boolean formulas. □
We proceed to more sophisticated constraints. By (C2) we refer to cases where we ask for satisfiability (refutability) and by (C2)′ to the cases asking for tautology (unsatisfiability).
Proposition 6.
Verifying whether a given ADF satisfies
Proof.
We show each constraint separately.
(C2): for membership note that checking whether a (partially evaluated) formula is satisfiable/refutable is in
(L2) and (L3): follows from [61,99] (checking whether a link is attacking/supporting is
(C2)′: analogously as for (C2), but for tautological or unsatisfiable formulas;
(C4): immediate, since checking equivalence of (partially evaluated) formulas is an archetypical
(Char): let
Thus, one can always find a constant number of interpretations that witness the property. This means the problem is in∗
∗
∗
∗
For hardness: consider the problem of checking whether a formula φ is tautological. Then
While some of these useful constraints have relatively high complexity, if we restrict an output ADF
Proposition 7.
Verifying whether a BADF with known link types satisfies
Proof.
For (L2) and (L3) the claim is immediate (the link types are given). For (C2), the claim follows directly from [99]. For (C4), hardness follows from taking
If one imposes the condition that each argument has at most k parents, for a given and fixed k (i.e. k is a constant), we can infer that all constraints can be checked in polynomial time, except for the optimization constraints.
Proposition 8.
Let k be a constant integer. Satisfaction of any constraint defined in Section 4, except (O1) and (O2), for a given ADF where each argument has at most k parents, is decidable in polynomial time.
Proof.
Membership follows, since under the restrictions it holds that one can construct the whole truth table in polynomial time (since we have a bounded number of variables in the conditions). Then one can check each property in polynomial time. □
7.2.Complexity of support enforcement under admissible semantics
We now show that the novel enforcement operator defined in Section 5 has the same complexity as the non-strict extension enforcement operator on AFs, under certain restrictions. We investigate the decision problem of the new enforcement operator, where we ask whether there exists a solution ADF such that its cost is at most a given integer (which is a standard way to investigate complexity of optimization problems). As a further condition we require the number of parents and
Proposition 9.
Support enforcement under admissible semantics on ADFs is
Proof.
Membership follows from constructing the truth table for each argument’s acceptance condition, guessing new links from the expanded arguments, and guessing new entries in expanded truth tables. That is, for an argument a, construct the whole truth table for the original acceptance condition
Finally, non-deterministically construct a three-valued interpretation I and check whether I is admissible in the expanded ADF, and whether the given interpretation J is less informative, i.e., that
For hardness, we show hardness holds already for AFs. Concretely, we adapt an existing proof for checking whether an argument is part of an admissible set of a given AF, which is an
We claim that
We note that any constraint defined in Section 4, except for optimization statements, can be added to the support enforcement operator, with the mentioned restrictions, without increased complexity. On the other hand, our proofs for these results exhibit exponentiality in running times w.r.t. the number of parents and expanded arguments. The same observation holds for our implementation presented in Section 8.1. Coping with large values for these parameters requires further work.
7.3.Complexity of structured enforcement under admissible semantics
Before looking at the complexity of the structured enforcement operator, we first consider the sizes of the knowledge base B, the “full” AF
Regarding the AF, we remark that many current approaches to AF instantiation in structured argumentation may produce large AFs, i.e., AFs whose number of arguments is not polynomially bounded by the size of the knowledge base. Studying approaches to more efficient AF generation is a current topic of research [76,103]. In this paper we make no concrete assumption on the size, but we do assume that both the knowledge base B and the full AF
The structural constraints we utilized to define the structured enforcement operator are in number polynomial to the size of the AF F, except for (3). However, these constraints can be represented differently. Let
We now investigate the complexity of the structured enforcement operator that is given as input a knowledge base B, represented as a set, an initial AF
Proposition 10.
The structured enforcement operator under admissible semantics is
Proof.
For membership, consider a non-deterministic guess of an expanded AF. Checking each constraint can be done, under the stated assumptions, in polynomial time. Hardness, as before for support enforcement, follows from checking whether an AF without any changes has an admissible set containing a particular argument (this problem is
8.Empirical evaluation of an answer set programming approach to support enforcement
In this section we give details to an answer set programming implementation of support enforcement (see Section 5), and an experimental evaluation of the resulting prototype.
8.1.Implementing support enforcement in ASP for admissible semantics
We have implemented support enforcement in answer set programming (ASP), based on goDiamond [62,63,98] v0.6.6, a solver for ADF reasoning tasks via ASP. In light of Proposition 3, we fixed, in our implementation, the set of expanded arguments to be a singleton set (since an enforcement using several expanded arguments can be straightforwardly transformed to using only one). We have applied all constraints we have defined Section 5, i.e., we have implemented the operation we call support enforcement.
High-level description. We begin with a high-level view on the operation we implemented, and a high-level view on how we implemented this operation. We have implemented support enforcement, as defined in Section 5, including all constraints defined for that operation, yet allowing only for one expanded argument. That is, our implementation takes as input an ADF and a three-valued interpretation (with the format specified below). The output is a modified ADF, including an expanded argument e, such that there is an admissible interpretation that is more informative than the given one (thereby enforcing the given interpretation). Further, only the following modifications are permitted: new links only from the expanded argument onto original arguments, all new links supporting, for each original argument a with original acceptance condition
Our implementation approach, from a high-level viewpoint, works as follows. Let the input be the given ADF D, a three-valued interpretation I, and expanded argument e. Assume that the existing arguments are
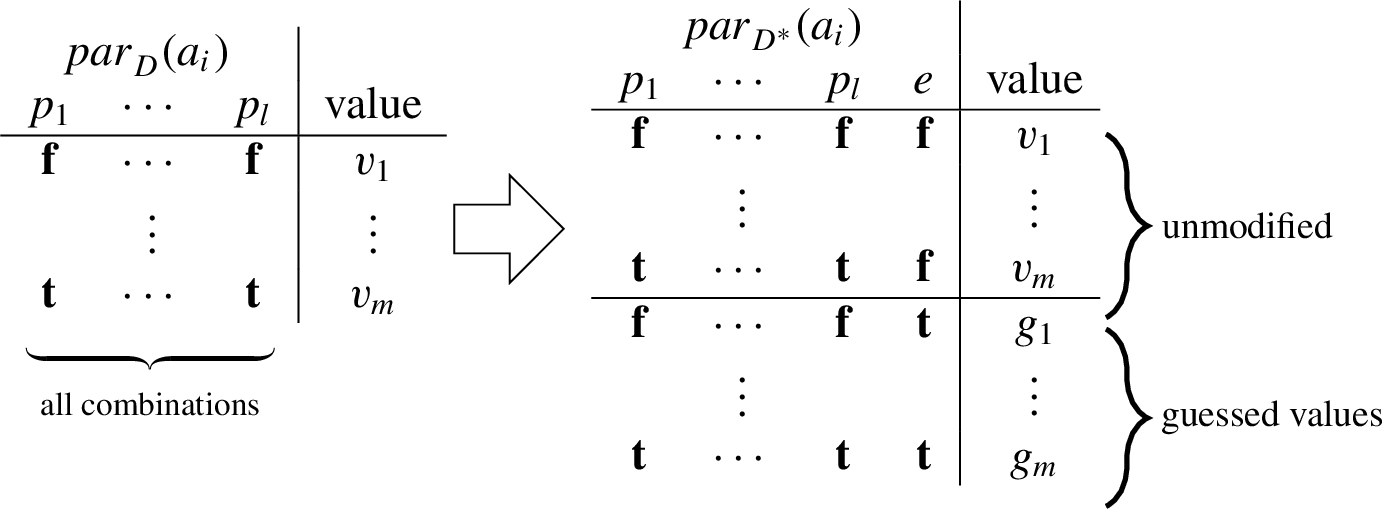
Fig. 9.
Constructing a truth table with guessed entries.
ASP background. We recall briefly ASP background [29,71,88]. We fix a countable set U of constants. An atom is an expression
For any program π, let
In this work we also consider optimization programs (following definitions from [33]), in particular programs with weak constraints of the form
Notation 1.
By convention, constants in ASP are written with a beginning lower case letter and variables are written with a beginning upper case letter. That is, “a” is a constant and “A” is a variable. In the subsequent encoding, we denote by A variables intended for arguments, by V we denote variables intended for valuations (interpretations in the terminology of the ASP modules we make use of), and F for variables that refer to identifiers for (Boolean) formulas.
Implementing support enforcement in diamond. In (go)Diamond, an ADF is represented via ASP facts, as follows. Let
In (go)Diamond, several derived predicates are then provided, in particular for several ADF semantics. We utilize the encodings for admissible semantics. We only recall predicates relevant for our approach, for details we refer to the original references and the code. In (go)Diamond, for each argument a, the acceptance condition
Listing 1.
Partial ASP encoding for support enforcement
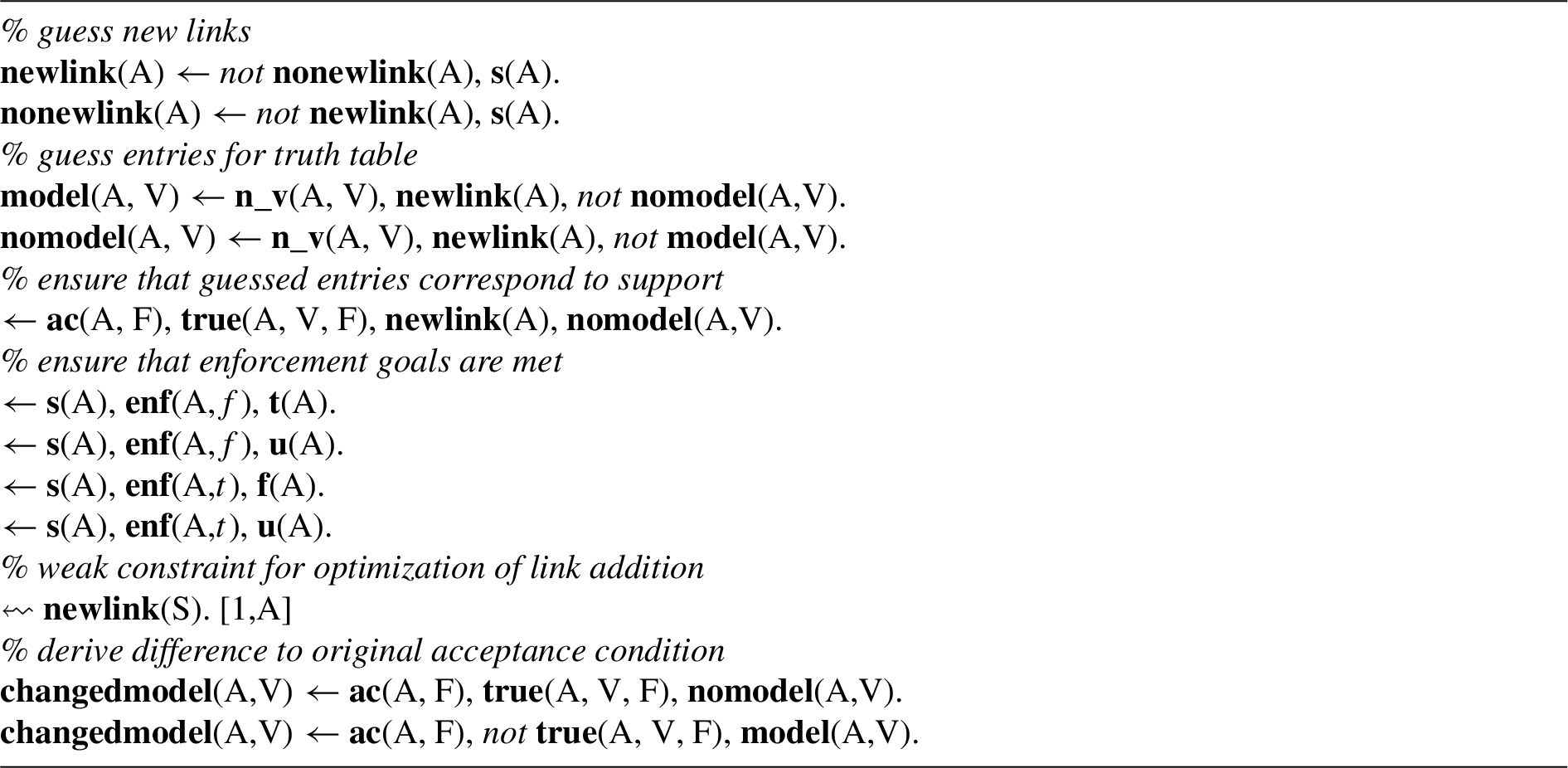
We adapted goDiamond’s encoding, as follows, see also Listing 1. The first two lines represent a (standard) guess in ASP whether a link is to be added onto argument A (note that the origin is clear: the link comes from a distinguished expanded argument). Next, as illustrated in Fig. 9, we construct an expanded truth table. Since we are “copying” the entries when the expanded argument is false, and also can assume (see Proposition 3) that the new argument is assigned true, we only need to represent the guessed values
The full ASP encodings are available at https://www.dbai.tuwien.ac.at/research/project/embarg/supp-enf/
which, derived from (go)Diamond, are distributed under the GPL license.
Example 21.
We show an example of support enforcement, which is taken from a part, and simplified form, of an instance ADF that has 216 arguments that was used in the experiments shown in the next section. For our illustration, nine arguments are relevant, which have the following unmodified acceptance conditions:
8.2.Experiments
We report on an experimental evaluation of the support enforcement operator implemented in ASP.
Instances and experimental setup. We performed experiments using instances from www.dbai.tuwien.ac.at/proj/adf/yadf/, which are ADFs that were generated from the AFs of domains ABA2AF, Planning2AF, and Traffic from ICCMA 2017 [66,67]. The generation procedure is described in [49, Section 5]. Briefly put, the generator transforms an undirected graph (from the AF competition) into cyclic or acyclic ADFs, by inheriting the graph structure (for acyclic ADFs, by a topological ordering, inducing an acyclic directed graph). Acceptance conditions are constructed by considering the parents (as given by the graph generation), and grouping parents into five classes: attack, group-attack, support, group-support, or XOR, which represent different types of generated Boolean subformulas, which are then connected via logical conjunction and disjunction.
We analyzed characteristics of the ADF instances. We list statistics of each domain in Table 3. Overall, the benchmark set contains 600 ADFs, which vary in several statistics. For instance, the maximum number of parents of arguments (i.e., the maximum in-degree of the graph) varies from at most 2 to at most 131. For the calculation of (number of) parents we excluded self-loops. We computed polarity of each ADF, and found that, from the whole set, 48 are bipolar, 547 are not bipolar, and 5 instances could not be checked (note that it is coNP-complete to check whether a link is supporting or attacking [61]). All bipolar ADFs have at most 12 parents for each argument.
Table 3
Statistics of ADFs used in the experimentation. For each group of instances we list the total number of ADFs, the average number of arguments in the ADFs, the interval of maximum number of parents in the ADFs (excluding self-loops), the number of cyclic ADFs, and the number of bipolar ADFs
| Planning | Number of ADFs | 200 |
| Average number of arguments | 202.64 | |
| Interval of maximum number of parents | 6–19 | |
| Number of ADFs with cyclic dependency graph | 100 | |
| Number of bipolar ADFs | 0 | |
| Traffic | Number of ADFs | 200 |
| Average number of arguments | 111.81 | |
| Interval of maximum number of parents | 2–19 | |
| Number of ADFs with cyclic dependency graph | 100 | |
| Number of bipolar ADFs | 35 | |
| ABA2AF | Number of ADFs | 200 |
| Average number of arguments | 43.83 | |
| Interval of maximum number of parents | 3–131 | |
| Number of ADFs with cyclic dependency graph | 100 | |
| Number of bipolar ADFs | 13 | |
| Overall | Number of ADFs | 600 |
| Average number of arguments | 119.427 | |
| Interval of maximum number of parents | 2–131 | |
| Number of ADFs with cyclic dependency graph | 300 | |
| Number of bipolar ADFs | 48 |
For each ADF we created three enforcement requests, i.e., interpretations to enforce, as follows. We selected, at random, a subset of the arguments in the ADF with probability
All experiments were run on a machine with two AMD Opteron Processors 6308, 12 × 16 GB RAM, and Debian 8. We used a timeout of 900 seconds on each individual instance (query), i.e., for each pair of ADF and enforcement. Furthermore, we restricted memory consumption (virtual memory) to at most 8 GB. In order to enforce these limits, and to have more logging information, we utilized the runsolver v3.4.0 tool33 by Olivier Roussel, which was also used in several competitions. For the ASP solver, we used clingo v5.3.0 [70].
Results and interpretations. The results are summarized in Table 4. The rows show the instances grouped by domain, number of queries, number of successful computations (i.e., where clingo terminated with the result within the limits), number of instances where an optima was found, number of instances with optimum cost 0, number of instances where clingo reported unsatisfiability, number of timeouts, and the median runtimes in seconds. In the following, we interpret the results in more detail.
Table 4
Summary of experimental results
| Domain | # | #successful | Opt. found | 0-cost | Unsat. | Timeout | Median time (sec) of succ. runs |
| Planning | 600 | 586 | 211 | 4 | 375 | 8 | 2.442 |
| Traffic | 600 | 591 | 341 | 49 | 250 | 0 | 0.188 |
| ABA2AF | 600 | 267 | 220 | 57 | 47 | 0 | 0.612 |
| All | 1800 | 1444 | 772 | 110 | 672 | 8 | 0.862 |
We first discuss successful and not successful runs. A run is deemed successful when clingo returned either with an optimal solution or reported unsatisfiability. In our experiments, we encountered four reasons for clingo not reporting successfully. The first is that the time limit was reached, which occurred rarely: only 8 runs timed out. In its current version, clingo does not support very high integers. Since in the ASP encoding used by us (and by Diamond), a truth table is constructed, and each entry is assigned an integer (an ID), we naturally have to deal with large integers. For instance, if the maximum number of parents is n, then an integer
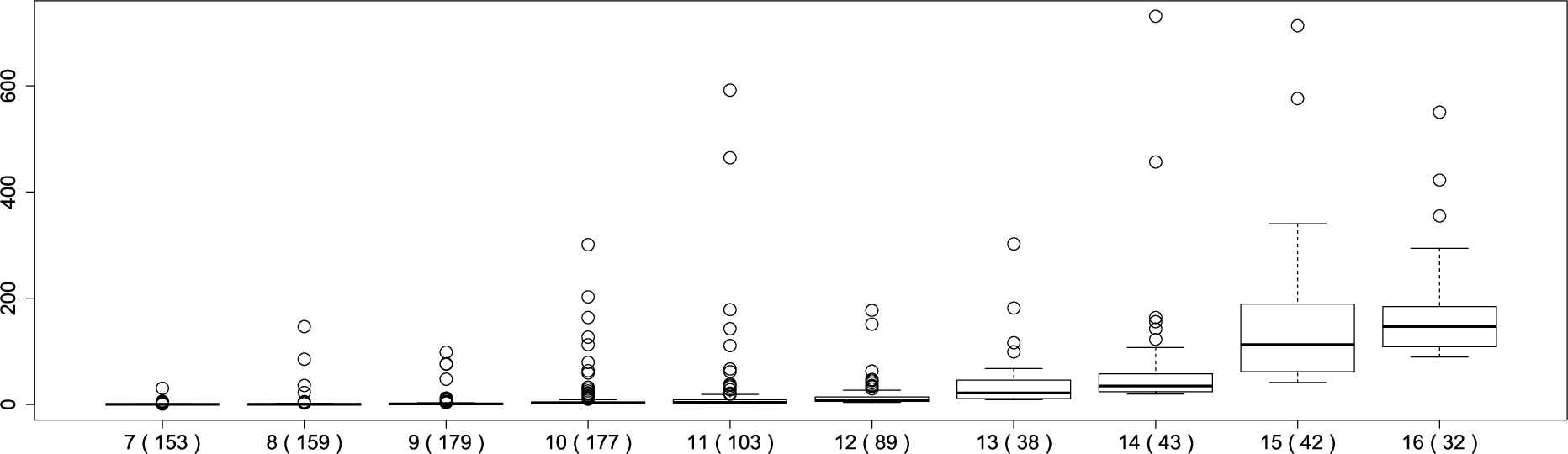
We move on to running time behavior of the successful runs. Table 4 summarizes that the median of these runs was (quite) low. Since, as observed above, the maximum number of parents seems to be a crucial parameter for difficulty, we detail running times for this parameter in Fig. 10. In the figure, the successfully solved instances are grouped by maximum number of parents (with the sample size in brackets) shown along the horizontal axis. As can be seen, there is a clear increase in running times when increasing the maximum number of parents, as expected. Nevertheless, even for a maximum number of parents of 16, running times were reasonable, e.g., below 200 seconds for most runs. We also looked at running time differences when considering cyclicity. As observed theoretically [77], acyclic ADFs have milder complexity. Within the successful runs, 726 were on acyclic ADFs and 718 were on cyclic ADFs. The cumulative running time (i.e., summing up all running times) were 5391.5 and 18112.7, respectively. While ADFs and enforcement requests are different for acyclic and cyclic instances, this result suggests that the difference in complexity was also observed empirically, in our experiments. Regarding bipolarity, the picture is not clear, since (recall description above) all bipolar ADFs have a low number of maximum number of parents (up to 12). Looking at the corresponding running times in Fig. 10 reveals that those runs were all solved quickly, independent of polarity. Such low running times do not give clear results of divergence of running times on bipolar or non-bipolar ADFs.
Fig. 10.
Whisker plot for all successful runs of support enforcement. In the vertical axis running times (sec) are shown, and in the horizontal axis instances are grouped by maximum number of parents (with size of the group in parentheses). The box shows the lower quartile and upper quartile (the 25th and 75th percentiles), the median in bold, and the lines denote the “whiskers“, i.e., these extend from the quartiles to the farthest points up to 1.5 times the interquartile range (range from lower and upper quartile) from upper/lower quartiles. Outliers are denoted as circles. Instances with a maximum number of parents less than seven are omitted (both their minimum and maximum running times are close to zero).
We now consider the three parameters for enforcement generation. When looking at those runs with the lowest number of arguments to be enforced to false (
Summarizing our results, with the ASP approach, we could solve 1444 out of 1800 instances, most of these within (rather) low running times. Non-solvability was mostly due to high memory consumption, which is to be expected as a natural barrier for our approach. Nevertheless, ADFs with at most 16 maximum number of parents were solved regularly.
9.Constraints for further operations
In this section we give a brief overview on further operators that fit into our three-layered approach, and for which structural constraints can be applied. Concretely, we look at revision of AFs, merging (aggregation) of AFs, and synthesis (learning) of AFs. Each of these operations result in a (modified) AF that has to satisfy certain semantical constraints. In addition some of these operators allow for structural constraints. These operators can be augmented with structural constraints we looked at in Section 4. For instance, in any of these operations one can fix certain parts of the AF, or impose implications (e.g. presence of one attack implies further attacks), or add further optimizations.
Revision of argumentation frameworks. Revision of knowledge has a long tradition in AI [1,69,74], and revision of semantics of AFs [42,43,48] and ADFs [79] has been studied recently. From a high-level perspective, these operators revise a given framework and return a modified framework. Many of these revision operators specify the semantics of the modified framework, and some, but not all, give constraints on the structure. In this regard, in our three-layered point of view, these operators specify semantical constraints, in the form of exact semantics a modified AF shall have, and sometimes further constraints such as optimizations. Our structural constraints can support further development of such revision operators by stating how an AF may evolve structurally, in addition to the semantics or existing structural constraints.
Merging of argumentation frameworks. Similar to revision, merging or aggregation of (logical) structures has received interest in the AI community [75]. Aggregation, or merging, of AFs has recently found attention in the argumentation community [26,41]. As an example for a semantical merging operator, consider an operator studied in [47], which, given a tuple of AFs, merges the tuple into an AF, or a set of AFs. For simplicity we look at those operators returning a single AF.44 Operators from this family specify the semantics of the output (i.e., specify a semantical constraint), and structural constraints that optimize the modifications of attacks. To such operators, similarly as for the revision operators, structural constraints can be added to further constrain the candidate solutions, e.g., to respect more interconnections between arguments and attacks.
Synthesis of argumentation frameworks. Broadly speaking, generation of structures from given information, also sometimes called learning, acquisition, or synthesis, has initiated several research directions within AI [20,24,46,100]. Focusing on the construction of argumentative structures [89,96,97], we recall the synthesis operation from [89], where our structural constraints can be applied. Simply put, the task in AF synthesis is to find an AF such that certain given examples of sets of arguments are (or are not) σ-extensions. An additional optimization criterion specifies that as many such examples as possible are satisfied. In its current form, AF synthesis incorporates structural constraints specifying that certain attacks have to part of the returned AF, or must be omitted. In addition, our structural constraints can specify, e.g., implications that specify that sets of attacks may be added as whole, or not at all.
10.Related work
A recent survey [52] gives an interesting overview over many approaches to dynamics of argumentation, constraints, and changes. In the following, we discuss relations of our work to several related works (including, but not restricting, to content of the survey).
Logical languages for dynamics and constraints. Several works considered constraints (in argumentation dynamics) specified in a logical language, which naturally relate to our work. In [50] control argumentation frameworks were proposed, where one can specify known, unknown, and controllable arguments by an agent, the last category being those arguments the agent can use in a debate. In [51,58] logical languages are proposed and used, in order to specify allowed changes to an argumentation framework. In contrast, we look ADFs (AFs in their works) and at particular families of constraints, consider their use cases, properties, computational aspects, and applied them in two case studies. Some of our constraints are already present in earlier works: limits of arguments and attacks, and mandatory (non-) presence of certain arguments and attacks is discussed, e.g., in [44,89,102]; similarly in enforcement and revision [42,43] optimization of modified attacks is part of the problem definition. We consider more general families of constraints. Constraints on presence of attacks is also, although in a quite different form, part of incorporation of preferences in structured argumentation, e.g., in [84], where a preference relation can make certain attacks not applicable. That is, a preference relation can be seen as a constraint on attacks.
Realizability and expressivity of argumentation frameworks. While our work focuses on structural constraints, semantical constraints are likewise important. A recent research direction is to study the signature of AFs, also called realizability [12,57,78]. That is, these studies reveal which sets of arguments can be, e.g., a part of the preferred semantics of an AF. In this way, limits to semantical constraints are given. Such constraints are also useful for incorporation of structural constraints, as seen by Example 10: when restricting an ADF structurally to be part of a particular sub family of ADFs (e.g., bipolar ADFs) the signature of the semantics changes and can directly lead to unsatisfiability of semantical constraints. Further, similar to this work, in [57] complexity results were shown for checking whether a semantical structure is part of the signature. While the realizability problem requires that an AF has exactly a certain semantics, in the synthesis problem [89] this is generalized to allow also for partial semantics specifications. Similarly, insights from AF synthesis can help to understand which constraints (semantical and structural) lead to a set of constraints that is satisfiable.
Dialogues, strategic argumentation, and incomplete AFs. Enforcement under structural constraints, as studied in this work, relates to some approaches in the literature. Incomplete AFs [13–17] are AFs where some attacks or arguments are fixed, while others can be modified. A task is then to see whether a set of arguments is an extension in all completions of the incomplete AFs. Bounds such as these, can be represented by the constraints considered in this work. In strategic argumentation, e.g., in [80–82], one can desire to look for an AF among many choices of AFs that satisfy a certain strategic goal (such as acceptance of an argument when adding arguments/attacks). Enforcement naturally shares this goal. Also, our structural constraints can be utilized to specify which AFs one may choose from. For our structured enforcement operator, dialogues, as studied in [64], have a similar motivation. In their work, a goal is to “reveal” (through a dialogue) parts of a knowledge base, in order to have parts revealed that make up a framework satisfying certain (strategic) goals. Similarly, structured enforcement aims to find an expansion satisfying an enforcement goal that also reflects contents of a knowledge base. Furthermore, different to the three directions, we work with general ADFs, consider several families of constraints, look at complexity of such families, and allow for rather fine-grained constraints (e.g., not allowing all completions). Further, our structured enforcement operator differs from the dialogue approach by working on expansion of AFs that reflect (general) structured formalisms in contrast to engaging in a dialogue that utters parts of a knowledge base, and include optimizations on such AFs.
11.Conclusions
In this article we have proposed to extend current (and future) dynamic operators on frameworks in argumentation in AI with constraints that, e.g., suit conditions “abstracted away” during instantiation, or ensure other desirable properties. More concretely, we proposed a set of constraints to be used for such operators, exemplified several use cases, and properties, of such constraints, investigated in more detail two concrete case studies developing an enforcement operator for ADFs based on supports and an enforcement operator for structured argumentation. The two case studies witness that our constraints can be utilized to extend operators, such as enforcement, in two ways: adapt them to more general abstract frameworks (e.g., ADFs), and adapt them to respect structural information from instantiation. Furthermore, we looked at the computational properties of constraints and the two novel enforcement operators. We implemented support enforcement in ASP, and presented an empirical evaluation of the resulting prototype. Our findings, from the case studies, are that several constraints can be applied to diverse scenarios, and our prototype implementation shows reasonable performance even when faced with complex optimization problems.
Directions for future work include, in particular, extending work on enforcement to complex contexts. For instance, our case study for a structural enforcement operator can be extended to one of the formalisms available in the field of structured argumentation (such as ABA and ASPIC+). However, such an endeavor requires care when instantiating: a large number of arguments (relations) should be avoided. We think that more efficient ways of instantiation, for which we already have seen early work [76,103], is a fruitful direction, since both dynamic operators we studied here, and static operators in argumentation can benefit from such efficiency gains.
Notes
1 We remark that the notion of “support” in abstract argumentation is not uniform. Common interpretations of support include support relation seen as deductive support [27], as necessary support [91,92], or as evidential support [93,94], see also [36].
2 In this example we included only assumptions as part of B, i.e., only assumptions as part of the knowledge base, and incorporated the rules (and contraries) into the functions
4 The assumption that the merging operators of [47] return a single AF does not hold in general for all input tuples of AFs; in fact they show that when considering operators satisfying certain properties there is none that always returns a single AF. Nevertheless, our structural constraints can be straightforwardly applied to a tuple (set) of AFs.
Acknowledgements
We thank the anonymous reviewers of the preliminary conference version [101] and this version of the paper and Thomas Linsbichler for their useful comments. This work has been supported by the Austrian Science Fund (FWF): P30168 and I2854.
References
[1] | C.E. Alchourrón, P. Gärdenfors and D. Makinson, On the logic of theory change: Partial meet contraction and revision functions, Journal of Symbolic Logic 50: (2) ((1985) ), 510–530. doi:10.2307/2274239. |
[2] | L. Amgoud and C. Cayrol, A reasoning model based on the production of acceptable arguments, Annals of Mathematics and Artificial Intelligence 34: (1–3) ((2002) ), 197–215. doi:10.1023/A:1014490210693. |
[3] | L. Amgoud, C. Cayrol, M. Lagasquie-Schiex and P. Livet, On bipolarity in argumentation frameworks, International Journal of Intelligent Systems 23: (10) ((2008) ), 1062–1093. doi:10.1002/int.20307. |
[4] | K. Atkinson, P. Baroni, M. Giacomin, A. Hunter, H. Prakken, C. Reed, G.R. Simari, M. Thimm and S. Villata, Towards artificial argumentation, AI Magazine 38: (3) ((2017) ), 25–36. doi:10.1609/aimag.v38i3.2704. |
[5] | P. Baroni, M. Caminada and M. Giacomin, An introduction to argumentation semantics, Knowledge Engineering Review 26: (4) ((2011) ), 365–410. doi:10.1017/S0269888911000166. |
[6] | P. Baroni, F. Cerutti, M. Giacomin and G. Guida, AFRA: Argumentation framework with recursive attacks, International Journal of Approximate Reasoning 52: (1) ((2011) ), 19–37. doi:10.1016/j.ijar.2010.05.004. |
[7] | P. Baroni, D. Gabbay, M. Giacomin and L. van der Torre (eds), Handbook of Formal Argumentation, College Publications, (2018) . |
[8] | R. Baumann, Normal and strong expansion equivalence for argumentation frameworks, Artificial Intelligence 193: ((2012) ), 18–44. doi:10.1016/j.artint.2012.08.004. |
[9] | R. Baumann, What does it take to enforce an argument? Minimal change in abstract argumentation, in: Proc. ECAI, L. De Raedt, C. Bessière, D. Dubois, P. Doherty, P. Frasconi, F. Heintz and P.J.F. Lucas, eds, Frontiers in Artificial Intelligence and Applications, Vol. 242: , IOS Press, (2012) , pp. 127–132. |
[10] | R. Baumann and G. Brewka, Expanding argumentation frameworks: Enforcing and monotonicity results, in: Proc. COMMA, P. Baroni, F. Cerutti, M. Giacomin and G.R. Simari, eds, Frontiers in Artificial Intelligence and Applications, Vol. 216: , IOS Press, (2010) , pp. 75–86. |
[11] | R. Baumann and G. Brewka, Extension removal in abstract argumentation – an axiomatic approach, in: Proc. AAAI, P. Van Hentenryck and Z.-H. Zhou, eds, AAAI Press, (2019) , pp. 2670–2677. |
[12] | R. Baumann, W. Dvořák, T. Linsbichler, H. Strass and S. Woltran, Compact argumentation frameworks, in: Proc. ECAI, T. Schaub, G. Friedrich and B. O’Sullivan, eds, Frontiers in Artificial Intelligence and Applications, Vol. 263: , IOS Press, (2014) , pp. 69–74. |
[13] | D. Baumeister, D. Neugebauer and J. Rothe, Verification in attack-incomplete argumentation frameworks, in: Proc. ADT, T. Walsh, ed., Lecture Notes in Computer Science, Vol. 9346: , Springer, (2015) , pp. 341–358. |
[14] | D. Baumeister, D. Neugebauer and J. Rothe, Credulous and skeptical acceptance in incomplete argumentation frameworks, in: Proc. COMMA, S. Modgil, K. Budzynska and J. Lawrence, eds, Frontiers in Artificial Intelligence and Applications, Vol. 305: , IOS Press, (2018) , pp. 181–192. |
[15] | D. Baumeister, D. Neugebauer, J. Rothe and H. Schadrack, Complexity of verification in incomplete argumentation frameworks, in: Proc. AAAI, S.A. McIlraith and K.Q. Weinberger, eds, AAAI Press, (2018) , pp. 1753–1760. |
[16] | D. Baumeister, D. Neugebauer, J. Rothe and H. Schadrack, Verification in incomplete argumentation frameworks, Artificial Intelligence 264: ((2018) ), 1–26. doi:10.1016/j.artint.2018.08.001. |
[17] | D. Baumeister, J. Rothe and H. Schadrack, Verification in argument-incomplete argumentation frameworks, in: Proc. ADT, T. Walsh, ed., Lecture Notes in Computer Science, Vol. 9346: , Springer, (2015) , pp. 359–376. |
[18] | T.J.M. Bench-Capon, Persuasion in practical argument using value-based argumentation frameworks, Journal of Logic and Computation 13: (3) ((2003) ), 429–448. doi:10.1093/logcom/13.3.429. |
[19] | T.J.M. Bench-Capon and P.E. Dunne, Argumentation in artificial intelligence, Artificial Intelligence 171: (10–15) ((2007) ), 619–641. doi:10.1016/j.artint.2007.05.001. |
[20] | F. Bergadano and D. Gunetti, Inductive Logic Programming – from Machine Learning to Software Engineering, MIT Press, (1996) . |
[21] | P. Besnard, A.J. García, A. Hunter, S. Modgil, H. Prakken, G.R. Simari and F. Toni, Introduction to structured argumentation, Argument & Computation 5: (1) ((2014) ), 1–4. doi:10.1080/19462166.2013.869764. |
[22] | P. Besnard and A. Hunter, Elements of Argumentation, MIT Press, (2008) . |
[23] | P. Besnard and A. Hunter, A review of argumentation based on deductive arguments, in: Handbook of Formal Argumentation, P. Baroni, D. Gabbay, M. Giacomin and L. van der Torre, eds, College Publications, (2018) , pp. 437–484, Chap. 9. |
[24] | C. Bessiere, F. Koriche, N. Lazaar and B. O’Sullivan, Constraint acquisition, Artificial Intelligence 244: ((2017) ), 315–342. doi:10.1016/j.artint.2015.08.001. |
[25] | P. Bisquert, C. Cayrol, F. Dupin de Saint-Cyr and M. Lagasquie-Schiex, Enforcement in argumentation is a kind of update, in: Proc. SUM, W. Liu, V.S. Subrahmanian and J. Wijsen, eds, Lecture Notes in Computer Science, Vol. 8078: , Springer, (2013) , pp. 30–43. |
[26] | G.A. Bodanza, F. Tohmé and M. Auday, Collective argumentation: A survey of aggregation issues around argumentation frameworks, Argument & Computation 8: (1) ((2017) ), 1–34. doi:10.3233/AAC-160014. |
[27] | G. Boella, D.M. Gabbay, L.W.N. van der Torre and S. Villata, Support in abstract argumentation, in: Proc. COMMA, P. Baroni, F. Cerutti, M. Giacomin and G.R. Simari, eds, Frontiers in Artificial Intelligence and Applications, Vol. 216: , IOS Press, (2010) , pp. 111–122. |
[28] | A. Bondarenko, P.M. Dung, R.A. Kowalski and F. Toni, An abstract, argumentation-theoretic approach to default reasoning, Artificial Intelligence 93: ((1997) ), 63–101. doi:10.1016/S0004-3702(97)00015-5. |
[29] | G. Brewka, T. Eiter and M. Truszczynski, Answer set programming at a glance, Communications of the ACM 54: (12) ((2011) ), 92–103. doi:10.1145/2043174.2043195. |
[30] | G. Brewka, S. Ellmauthaler, H. Strass, J.P. Wallner and S. Woltran, Abstract dialectical frameworks, in: Handbook of Formal Argumentation, P. Baroni, D. Gabbay, M. Giacomin and L. van der Torre, eds, College Publications, (2018) , pp. 237–285, Chap. 5. |
[31] | G. Brewka, S. Polberg and S. Woltran, Generalizations of Dung frameworks and their role in formal argumentation, IEEE Intelligent Systems 29: (1) ((2014) ), 30–38. doi:10.1109/MIS.2013.122. |
[32] | G. Brewka and S. Woltran, Abstract dialectical frameworks, in: Proc. KR, AAAI Press, (2010) , pp. 102–111. |
[33] | F. Calimeri, W. Faber, M. Gebser, G. Ianni, R. Kaminski, T. Krennwallner, N. Leone, F. Ricca and T. Schaub, ASP-Core-2 Input Language Format, (2012) . https://www.mat.unical.it/aspcomp2013/files/ASP-CORE-2.0.pdf. |
[34] | C. Cayrol, F. Dupin de Saint-Cyr and M. Lagasquie-Schiex, Change in abstract argumentation frameworks: Adding an argument, Journal of Artificial Intelligence Research 38: ((2010) ), 49–84. doi:10.1613/jair.2965. |
[35] | C. Cayrol, J. Fandinno, L.F. del Cerro and M. Lagasquie-Schiex, Valid attacks in argumentation frameworks with recursive attacks, in: Proc. COMMONSENSE, A.S. Gordon, R. Miller and G. Turán, eds, CEUR Workshop Proceedings, Vol. 2052: , CEUR-WS.org, (2017) . |
[36] | C. Cayrol and M.-C. Lagasquie-Schiex, Bipolarity in argumentation graphs: Towards a better understanding, International Journal of Approximate Reasoning 54: (7) ((2013) ), 876–899. doi:10.1016/j.ijar.2013.03.001. |
[37] | F. Cerutti, S.A. Gaggl, M. Thimm and J.P. Wallner, Foundations of implementations for formal argumentation, in: Handbook of Formal Argumentation, P. Baroni, D. Gabbay, M. Giacomin and L. van der Torre, eds, College Publications, (2018) , pp. 688–767, Chap. 15. |
[38] | G. Charwat, W. Dvořák, S.A. Gaggl, J.P. Wallner and S. Woltran, Methods for solving reasoning problems in abstract argumentation – a survey, Artificial Intelligence 220: ((2015) ), 28–63. doi:10.1016/j.artint.2014.11.008. |
[39] | A. Cohen, S. Gottifredi, A.J. García and G.R. Simari, A survey of different approaches to support in argumentation systems, Knowledge Engineering Review 29: (5) ((2014) ), 513–550. doi:10.1017/S0269888913000325. |
[40] | A. Cohen, S. Gottifredi, A.J. García and G.R. Simari, An approach to abstract argumentation with recursive attack and support, Journal of Applied Logic 13: (4) ((2015) ), 509–533. doi:10.1016/j.jal.2014.12.001. |
[41] | S. Coste-Marquis, C. Devred, S. Konieczny, M. Lagasquie-Schiex and P. Marquis, On the merging of Dung’s argumentation systems, Artificial Intelligence 171: (10–15) ((2007) ), 730–753. doi:10.1016/j.artint.2007.04.012. |
[42] | S. Coste-Marquis, S. Konieczny, J. Mailly and P. Marquis, On the revision of argumentation systems: Minimal change of arguments statuses, in: Proc. KR, C. Baral, G.D. Giacomo and T. Eiter, eds, AAAI Press, (2014) , pp. 52–61. |
[43] | S. Coste-Marquis, S. Konieczny, J. Mailly and P. Marquis, A translation-based approach for revision of argumentation frameworks, in: Proc. JELIA, E. Fermé and J. Leite, eds, Lecture Notes in Computer Science, Vol. 8761: , Springer, (2014) , pp. 397–411. |
[44] | S. Coste-Marquis, S. Konieczny, J. Mailly and P. Marquis, Extension enforcement in abstract argumentation as an optimization problem, in: Proc. IJCAI, Q. Yang and M. Wooldridge, eds, AAAI Press, (2015) , pp. 2876–2882. |
[45] | K. Cyras, X. Fan, C. Schulz and F. Toni, Assumption-based argumentation: Disputes, explanations, preferences, in: Handbook of Formal Argumentation, P. Baroni, D. Gabbay, M. Giacomin and L. van der Torre, eds, College Publications, (2018) , pp. 365–408, Chap. 7. |
[46] | J. Davis and J. Ramon (eds), Proc. ILP 2014, Revised Selected Papers, Lecture Notes in Computer Science, Vol. 9046: , Springer, (2015) . |
[47] | J. Delobelle, A. Haret, S. Konieczny, J. Mailly, J. Rossit and S. Woltran, Merging of abstract argumentation frameworks, in: Proc. KR, C. Baral, J.P. Delgrande and F. Wolter, eds, AAAI Press, (2016) , pp. 33–42. |
[48] | M. Diller, A. Haret, T. Linsbichler, S. Rümmele and S. Woltran, An extension-based approach to belief revision in abstract argumentation, International Journal of Approximate Reasoning 93: ((2018) ), 395–423. doi:10.1016/j.ijar.2017.11.013. |
[49] | M. Diller, A. Keshavarzi Zafarghandi, T. Linsbichler and S. Woltran, Investigating subclasses of abstract dialectical frameworks, in: Proc. COMMA, S. Modgil, K. Budzynska and J. Lawrence, eds, Frontiers in Artificial Intelligence and Applications, Vol. 305: , IOS Press, (2018) , pp. 61–72. |
[50] | Y. Dimopoulos, J. Mailly and P. Moraitis, Control argumentation frameworks, in: Proc. AAAI, S.A. McIlraith and K.Q. Weinberger, eds, AAAI Press, (2018) , pp. 4678–4685. |
[51] | S. Doutre, A. Herzig and L. Perrussel, A dynamic logic framework for abstract argumentation, in: Proc. KR, C. Baral, G.D. Giacomo and T. Eiter, eds, AAAI Press, (2014) , pp. 62–71. |
[52] | S. Doutre and J. Mailly, Constraints and changes: A survey of abstract argumentation dynamics, Argument & Computation 9: (3) ((2018) ), 223–248. doi:10.3233/AAC-180425. |
[53] | P.M. Dung, On the acceptability of arguments and its fundamental role in nonmonotonic reasoning, logic programming and n-person games, Artificial Intelligence 77: (2) ((1995) ), 321–357. doi:10.1016/0004-3702(94)00041-X. |
[54] | P.M. Dung, An axiomatic analysis of structured argumentation with priorities, Artificial Intelligence 231: ((2016) ), 107–150. doi:10.1016/j.artint.2015.10.005. |
[55] | P.M. Dung and P.M. Thang, Representing the semantics of abstract dialectical frameworks based on arguments and attacks, Argument & Computation 9: (3) ((2018) ), 249–267. doi:10.3233/AAC-180427. |
[56] | P.E. Dunne, Computational properties of argument systems satisfying graph-theoretic constraints, Artificial Intelligence 171: (10–15) ((2007) ), 701–729. doi:10.1016/j.artint.2007.03.006. |
[57] | P.E. Dunne, W. Dvořák, T. Linsbichler and S. Woltran, Characteristics of multiple viewpoints in abstract argumentation, Artificial Intelligence 228: ((2015) ), 153–178. doi:10.1016/j.artint.2015.07.006. |
[58] | F. Dupin de Saint-Cyr, P. Bisquert, C. Cayrol and M. Lagasquie-Schiex, Argumentation update in YALLA (yet another logic language for argumentation), International Journal of Approximate Reasoning 75: ((2016) ), 57–92. doi:10.1016/j.ijar.2016.04.003. |
[59] | W. Dvořák and P.E. Dunne, Computational problems in formal argumentation and their complexity, in: Handbook of Formal Argumentation, P. Baroni, D. Gabbay, M. Giacomin and L. van der Torre, eds, College Publications, (2018) , pp. 631–688, Chap. 13. |
[60] | W. Dvořák, S. Ordyniak and S. Szeider, Augmenting tractable fragments of abstract argumentation, Artificial Intelligence 186: ((2012) ), 157–173. doi:10.1016/j.artint.2012.03.002. |
[61] | S. Ellmauthaler, Abstract Dialectical Frameworks: Properties, Complexity, and Implementation, Master’s thesis, Technische Universität Wien, Institut für Informationssysteme, 2012. |
[62] | S. Ellmauthaler and H. Strass, The DIAMOND system for computing with abstract dialectical frameworks, in: Proc. COMMA, S. Parsons, N. Oren, C. Reed and F. Cerutti, eds, Frontiers in Artificial Intelligence and Applications, Vol. 266: , IOS Press, (2014) , pp. 233–240. |
[63] | S. Ellmauthaler and H. Strass, DIAMOND 3.0 – a native C++ implementation of DIAMOND, in: Proc. COMMA, Frontiers in Artificial Intelligence and Applications, Vol. 287: , IOS Press, (2016) , pp. 471–472. |
[64] | X. Fan and F. Toni, A general framework for sound assumption-based argumentation dialogues, Artificial Intelligence 216: ((2014) ), 20–54. doi:10.1016/j.artint.2014.06.001. |
[65] | D.M. Gabbay, Semantics for higher level attacks in extended argumentation frames part 1: Overview, Studia Logica 93: (2–3) ((2009) ), 357–381. doi:10.1007/s11225-009-9211-4. |
[66] | S.A. Gaggl, T. Linsbichler, M. Maratea and S. Woltran, Introducing the second international competition on computational models of argumentation, in: Proc. SAFA, M. Thimm, F. Cerutti, H. Strass and M. Vallati, eds, CEUR Workshop Proceedings, Vol. 1672: , CEUR-WS.org, (2016) , pp. 4–9. |
[67] | S.A. Gaggl, T. Linsbichler, M. Maratea and S. Woltran, Summary report of the second international competition on computational models of argumentation, AI Magazine 39: (4) ((2018) ), 77–79. doi:10.1609/aimag.v39i4.2781. |
[68] | A.J. García and G.R. Simari, Defeasible logic programming: An argumentative approach, Theory and Practice of Logic Programming 4: (1–2) ((2004) ), 95–138. doi:10.1017/S1471068403001674. |
[69] | P. Gärdenfors, Knowledge in Flux: Modelling the Dynamics of Epistemic States, The MIT Press, Cambridge, MA, (1988) . |
[70] | M. Gebser, R. Kaminski, B. Kaufmann, M. Ostrowski, T. Schaub and P. Wanko, Theory solving made easy with clingo 5, in: Technical Communications of ICLP, (2016) , pp. 2–1215. |
[71] | M. Gelfond and V. Lifschitz, The stable model semantics for logic programming, in: Proc. ICLP/SLP, MIT Press, (1988) , pp. 1070–1080. |
[72] | T.F. Gordon, H. Prakken and D. Walton, The Carneades model of argument and burden of proof, Artificial Intelligence 171: (10–15) ((2007) ), 875–896. doi:10.1016/j.artint.2007.04.010. |
[73] | A. Haret, J.P. Wallner and S. Woltran, Two sides of the same coin: Belief revision and enforcing arguments, in: Proc. IJCAI, J. Lang, ed., ijcai.org, (2018) , pp. 1854–1860. |
[74] | H. Katsuno and A.O. Mendelzon, On the difference between updating a knowledge base and revising it, in: Proc. KR, Morgan Kaufmann, (1991) , pp. 387–394. |
[75] | S. Konieczny and R. Pino Pérez, Merging information under constraints: A logical framework, Journal of Logic and Computation 12: (5) ((2002) ), 773–808. doi:10.1093/logcom/12.5.773. |
[76] | T. Lehtonen, J.P. Wallner and M. Järvisalo, From structured to abstract argumentation: Assumption-based acceptance via AF reasoning, in: Proc. ECSQARU, A. Antonucci, L. Cholvy and O. Papini, eds, Lecture Notes in Computer Science, Vol. 10369: , Springer, (2017) , pp. 57–68. |
[77] | T. Linsbichler, M. Maratea, A. Niskanen, J.P. Wallner and S. Woltran, Novel algorithms for abstract dialectical frameworks based on complexity analysis of subclasses and SAT solving, in: Proc. IJCAI, J. Lang, ed., ijcai.org, (2018) , pp. 1905–1911. |
[78] | T. Linsbichler, J. Pührer and H. Strass, A uniform account of realizability in abstract argumentation, in: Proc. ECAI, G.A. Kaminka, M. Fox, P. Bouquet, E. Hüllermeier, V. Dignum, F. Dignum and F. van Harmelen, eds, Frontiers in Artificial Intelligence and Applications, Vol. 285: , IOS Press, (2016) , pp. 252–260. |
[79] | T. Linsbichler and S. Woltran, Revision of abstract dialectical frameworks: Preliminary report, in: Proc. Arg-LPNMR, S.A. Gaggl, J.C. Nieves and H. Strass, eds, (2016) , proceedings available at: http://arxiv.org/abs/1611.02439. |
[80] | M.J. Maher, Corrupt strategic argumentation: The ideal and the naive, in: Proc. 29th Australasian Joint Conference on Artificial Intelligence, B.H. Kang and Q. Bai, eds, Lecture Notes in Computer Science, Vol. 9992: , Springer, (2016) , pp. 17–28. |
[81] | M.J. Maher, Resistance to corruption of general strategic argumentation, in: Proc. PRIMA, M. Baldoni, A.K. Chopra, T.C. Son, K. Hirayama and P. Torroni, eds, Lecture Notes in Computer Science, Vol. 9862: , Springer, (2016) , pp. 61–75. |
[82] | M.J. Maher, Resistance to corruption of strategic argumentation, in: Proc. AAAI, D. Schuurmans and M.P. Wellman, eds, AAAI Press, (2016) , pp. 1030–1036. |
[83] | S. Modgil, Reasoning about preferences in argumentation frameworks, Artificial Intelligence 173: (9–10) ((2009) ), 901–934. doi:10.1016/j.artint.2009.02.001. |
[84] | S. Modgil and H. Prakken, Resolutions in structured argumentation, in: Proc. COMMA, B. Verheij, S. Szeider and S. Woltran, eds, Frontiers in Artificial Intelligence and Applications, Vol. 245: , IOS Press, (2012) , pp. 310–321. |
[85] | S. Modgil and H. Prakken, A general account of argumentation with preferences, Artificial Intelligence 195: ((2013) ), 361–397. doi:10.1016/j.artint.2012.10.008. |
[86] | S. Modgil and H. Prakken, Abstract rule-based argumentation, in: Handbook of Formal Argumentation, P. Baroni, D. Gabbay, M. Giacomin and L. van der Torre, eds, College Publications, (2018) , pp. 287–364, Chap. 6. |
[87] | S. Nielsen and S. Parsons, A generalization of Dung’s abstract framework for argumentation: Arguing with sets of attacking arguments, in: Proc. ArgMAS, N. Maudet, S. Parsons and I. Rahwan, eds, Lecture Notes in Computer Science, Vol. 4766: , Springer, (2007) , pp. 54–73. |
[88] | I. Niemelä, Logic programs with stable model semantics as a constraint programming paradigm, Annals of Mathematics and Artificial Intelligence 25: (3–4) ((1999) ), 241–273. doi:10.1023/A:1018930122475. |
[89] | A. Niskanen, J.P. Wallner and M. Järvisalo, Synthesizing argumentation frameworks from examples, in: Proc. ECAI, G.A. Kaminka, M. Fox, P. Bouquet, E. Hüllermeier, V. Dignum, F. Dignum and F. van Harmelen, eds, Frontiers in Artificial Intelligence and Applications, Vol. 285: , IOS Press, (2016) , pp. 551–559. |
[90] | A. Niskanen, J.P. Wallner and M. Järvisalo, Extension enforcement under grounded semantics in abstract argumentation, in: Proc. KR, M. Thielscher, F. Toni and F. Wolter, eds, AAAI Press, (2018) , pp. 178–183. |
[91] | F. Nouioua and V. Risch, Bipolar argumentation frameworks with specialized supports, in: Proc. ICTAI, IEEE Computer Society, (2010) , pp. 215–218. |
[92] | F. Nouioua and V. Risch, Argumentation frameworks with necessities, in: Proc. SUM, S. Benferhat and J. Grant, eds, Lecture Notes in Computer Science, Vol. 6929: , Springer, (2011) , pp. 163–176. |
[93] | N. Oren and T.J. Norman, Semantics for evidence-based argumentation, in: Proc. COMMA, P. Besnard, S. Doutre and A. Hunter, eds, Frontiers in Artificial Intelligence and Applications, Vol. 172: , IOS Press, (2008) , pp. 276–284. |
[94] | N. Oren, C. Reed and M. Luck, Moving between argumentation frameworks, in: Proc. COMMA, P. Baroni, F. Cerutti, M. Giacomin and G.R. Simari, eds, Frontiers in Artificial Intelligence and Applications, Vol. 216: , IOS Press, (2010) , pp. 379–390. |
[95] | S. Polberg, Understanding the abstract dialectical framework, in: Proc. JELIA, L. Michael and A.C. Kakas, eds, Lecture Notes in Computer Science, Vol. 10021: , Springer, (2016) , pp. 430–446. |
[96] | R. Riveret, On learning abstract argumentation graphs from bivalent statement labellings, in: Proc. ICTAI, IEEE Computer Society, (2016) , pp. 190–195. |
[97] | R. Riveret and G. Governatori, On learning attacks in probabilistic abstract argumentation, in: Proc. AAMAS, C.M. Jonker, S. Marsella, J. Thangarajah and K. Tuyls, eds, ACM, (2016) , pp. 653–661. |
[98] | H. Strass and S. Ellmauthaler, goDiamond 0.6.6 ICCMA 2017 System Description, 2017. |
[99] | H. Strass and J.P. Wallner, Analyzing the computational complexity of abstract dialectical frameworks via approximation fixpoint theory, Artificial Intelligence 226: ((2015) ), 34–74. doi:10.1016/j.artint.2015.05.003. |
[100] | L.G. Valiant, A theory of the learnable, Communications of the ACM 27: (11) ((1984) ), 1134–1142. doi:10.1145/1968.1972. |
[101] | J.P. Wallner, Structural constraints for dynamic operators in abstract argumentation, in: Proc. COMMA, S. Modgil, K. Budzynska and J. Lawrence, eds, Frontiers in Artificial Intelligence and Applications, Vol. 305: , IOS Press, (2018) , pp. 73–84. |
[102] | J.P. Wallner, A. Niskanen and M. Järvisalo, Complexity results and algorithms for extension enforcement in abstract argumentation, Journal of Artificial Intelligence Research 60: ((2017) ), 1–40. doi:10.1613/jair.5415. |
[103] | B. Yun, S. Vesic and M. Croitoru, Toward a more efficient generation of structured argumentation graphs, in: Proc. COMMA, S. Modgil, K. Budzynska and J. Lawrence, eds, Frontiers in Artificial Intelligence and Applications, Vol. 305: , IOS Press, (2018) , pp. 205–212. |

