
Defeasible logic programming: DeLP-servers, contextual queries, and explanations for answers
Abstract
Argumentation represents a way of reasoning over a knowledge base containing possibly incomplete and/or inconsistent information, to obtain useful conclusions. As a reasoning mechanism, the way an argumentation reasoning engine reaches these conclusions resembles the cognitive process that humans follow to analyse their beliefs; thus, unlike other computationally reasoning systems, argumentation offers an intellectually friendly alternative to other defeasible reasoning systems. Logic Programming is a computational paradigm that has produced computationally attractive systems with remarkable success in many applications. Merging ideas from both areas, Defeasible Logic Programming offers a computational reasoning system that uses an argumentation engine to obtain answers from a knowledge base represented using a logic programming language extended with defeasible rules. This combination of ideas brings about a computationally effective system together with a human-like reasoning model facilitating its use in applications.
1.Introduction
The representation of knowledge and its exploitation in solving problems is one of the most important areas of Artificial Intelligence. In this fertile field of research, described as Knowledge Representation and Reasoning, different systems have been proposed during the past decades, offering interesting and highly valuable alternatives such as McCarthy's Circumscription (McCarthy, 1980), Reiter's Default Logic (Reiter, 1980), McDermott and Doyle's Nonmonotonic Logic (McDermott & Doyle, 1980), Moore's Autoepistemic Logic (Moore, 1984), and the work of Pollock on defeasible reasoning (Pollock, 1987, 1996) and Loui on argumentation (Loui,1987), started lines of research that lead to many proposals to address the problem of having a computational approach to commonsense reasoning.
The research started in the 1980s led to a number of proposals on computationally oriented systems that consider the theoretical and practical underpinnings of argumentation as an effective reasoning process. Particularly, in the argumentation community we can mention the work of Lin and Shoham (1989), Nute (1987, 1988), Simari (1989) and Simari and Loui (1992) considering defeasible reasoning and argumentation, Dung (1993, 1995) on abstract argumentation frameworks, Bondarenko, Toni, and Kowalski (1993) and Bondarenko, Dung, Kowalski, and Toni(1997) leading to Assumption-Based Argumentation, Prakken (2010) and Modgil and Prakken(2013) on the development of ASPIC+, Besnard and Hunter introduced in Besnard and Hunter(2001, 2008) an argumentation system based on classical logic. Several works on the research on argumentation systems have been produced, see Chesñevar, Maguitman, and Loui (2000), Prakkenand Vreeswijk (2002), Bench-Capon and Dunne (2007), Besnard and Hunter (2008), and Rahwanand Simari (2009).
From the body of work on Nonmonotonic and Defeasible Reasoning, Logic Programming has emerged as one of the more attractive choices for its theoretical soundness and effective implementations. Thus, systems based on this paradigm have received increasing attention from industry for the construction of intelligent systems. The introduction of the elements of defeasible reasoning in logic programming was a natural choice to address the problem of inconsistency.
Defeasible Logic Programming, or DeLP for short, provides a computational reasoning system that uses an argumentation engine to obtain answers from a knowledge base represented using a logic programming language extended with defeasible rules that stem from the work reported in Simari (1989) and Simari and Loui (1992). The language of the DeLP system contains classical negation and offers the possibility of using default negation (see Baral & Gelfond, 1994), sharing the declarative capability of logic programming for representing knowledge, and adding the possibility of representing weak information in the form of defeasible rules. The argumentation-based inference mechanism has the ability of considering reasons for and against potential conclusions and deciding which are the ones that can be obtained (warranted) from the knowledge base (see García, 2000, García & Simari, 2004).
The DeLP reasoning engine forms the core of a Defeasible Logic Programming Server, or DeLP-Server for short (García, Rotstein, Tucat, & Simari, 2007). A DeLP-Server is conceived as the support for the implementation of argumentative reasoning services that work over knowledge bases represented as defeasible logic programs. These servers were developed to provide a reasoning service as part of a knowledge-based infrastructure in multi-agent systems (MAS). An inherent characteristic of MASs is that they constitute a distributed environment, where hosts for services and agents could be in different locations that could even be physically apart; thus, client agents that operate in an MAS, can remotely access DeLP-Servers that support different reasoning services that exploit particular knowledge bases.
In addition to answering queries from a knowledge base,11 a DeLP-Server offers the additional capability of complementing these queries with an additional fragment of a defeasible logic program. This program fragment will act as a private context for the query, allowing a DeLP-server to respond to that contextualised query using not only the knowledge stored in the server but also temporarily modifying it with this private context in several specific ways. We will discuss the subject in one of the sections below.
Another important and desirable feature in any knowledge-based system is that of offering explanations that will improve the understanding of an answer returned after a query. In the framework discussed here, explanations aim to transfer the understanding of how, from a given argumentation framework, the status of a particular argument was obtained; thus, an explanation will consist of a structure that reflects the analysis carried out to obtain such status, and it will contain those arguments and counterarguments that were considered in the analysis leading to its warrant status. That is, the warrant status of a claim will be explained by presenting the whole set of dialectical trees that was generated to decide the warrant status of the arguments related to the claim. From the point of view of the receiver, this explanation will make available all the arguments considered, their statuses (i.e. defeated/undefeated), with all their interactions explicitly shown, showing to the receiver of the explanation all the elements at stake in the dialectical analysis that supports the answer.
This paper has the aim of presenting in a progressive manner the elements involved in a knowledge-based system where its reasoning mechanism uses an argumentative approach to epistemic reasoning. We will begin by introducing the essential constituents of DeLP, then we will proceed to describe how a DeLP-Server works, and we will introduce the explanation facility designed with argumentative reasoning in mind. To conclude this work, we will succinctly describe other developments based on DeLP.
2.Knowledge representation
DeLP is a formalisation of defeasible reasoning in which results of Logic Programming and Argumentation are combined. DeLP has the declarative capability of representing knowledge in a language that extends the language of logic programming with the possibility of representing weak information in the form of defeasible rules, and an argumentation-based inference mechanism for warranting conclusions. In what follows, we will use concepts of Logic Programming that will be brought in as necessary in the presentation.
This section will introduce a description of DeLP's features for knowledge representation and then, in the following section, the details concerning its inference mechanism will be explained. Although the work leading to the formalisation of DeLP began in the early 1990s Simari, Chesñevar, García (1994a, 1994b) as an evolution of the work in Simari and Loui (1992), its complete formalisation was completed in García (2000) and finally published in García and Simari (2004). Further developments, that will be described below, can be found in the following related material in García et al. (2007), Tucat, Garcia, and Simari (2009), Martínez, García, and Simari (2012), and García, Chesñevar, Rotstein, and Simari (2013).
Our knowledge representation language will be determined by a set of atoms. Atoms can be preceded by the strong negation symbol ‘∼’. Atoms that are not preceded by strong negation will also be called positive literals and atoms preceded by strong negation will be called negative literals, the term literal, or sometimes objective literal, will refer to either one. A pair of literals involving a positive and a negative literal over the same atom are called complementary or contradictory. For instance, ‘
A defeasible logic program, abbreviated d.l.p., is a set of facts, strict rules, and defeasible rules defined as follows:
Facts are ground (objective) literals, e.g.
Strict Rules represent a relation between a ground literal L0, or head of the rule, and a set of ground literals {Li}i>0, or body of the rule, and are denoted by
Defeasible Rules are used to represent a weaker connection between pieces of information, they are denoted by
Note that, from a syntactic point of view, strict and defeasible rules differ only in the symbol between the head and the body of the rule. It is interesting to remark here that the representational choice between these two forms of relating the head and the body of a rule is ultimately a matter of context, sometimes a rule could change according to the environment in which it is used; for instance, a rule that locally can be considered strict could become defeasible in a larger environment.
Defeasible rules allow to represent a weak connection between the body (antecedent) and the head (consequence) of the rule. A defeasible rule
Nevertheless, strict rules establish a strict connection between body and head; thus, the rule ‘
As discussed in Alferes, Pereira, and Przymusinski (1996), logic programs, deductive databases, and more generally non-monotonic theories, use various forms of default negation, usually denoting ‘not F’ as the default negation of ‘F’, whose major distinctive feature is that not ‘F’ is assumed by default, i.e. it is assumed in the absence of sufficient evidence to the contrary ‘F’. In DeLP default negation can be used in the body of defeasible rules; for instance, the rule ‘
Methodologically, it is suggested that the default negation ‘not’ be used only on literals appearing in the body of defeasible rules; these literals, that are known as extended literals, provide another form of defeasibility. The motivation for this recommendation is that strict rules with extended literals in their body would become defeasible (see García & Simari, 2004 for more details).
A defeasible rule with an empty body represents an interesting representational device that can be used as information that could be used when no contrary information exists; this type of defeasible rule was introduced in several approaches to defeasible reasoning and is called a presumption (García & Simari, 2004, Martínez et al., 2012, Nute, 1988).
Note that the symbols ‘
A defeasible logic program is set of facts and rules, however, when required, a d.l.p. is denoted by
Example 2.1
DeLP-program
The program above shows an application example with several facts and rules. The set Π2.1 has some facts representing that: it is Monday, it is cloudy, it is the dry season, there are big waves at the beach, the grass of our yard is grown, we can hire a gardener, we are on vacation, and three strict rules that represent: on vacation we do not work, if there are not many surfers then there are few surfers and if you are ill then you should not go surfing.
The set Δ2.1 contains defeasible rules that can be used in the process of building arguments for supporting or attacking different claims. For instance, the first rule in Δ2.1 represents that having spare time on a nice day, is a good reason to go surfing, and can be used in support of the claim go surfing (surf). Note that there is also a rule that can be used for concluding that today is not a nice day (∼ nice) and another rule that provides reasons for concluding that today I am busy (busy). In the next section, we will show how rules and facts are used in defeasible derivations and then we will show what constitutes an argument that supports a conclusion.
3.Defeasible derivations and arguments
In DeLP a ground literal L will have a defeasible derivation from a program
In the program
Since strong negation is allowed in the head of rules, it is possible to obtain defeasible derivations of contradictory literals from a program, e.g. both literals rain and ∼ rain have a defeasible derivation from
In the presence of defeasible derived contradictory literals, DeLP uses a dialectical process to decide which information prevails, i.e. information such that no acceptable reason can be put forward against it. Reasons will be supported by arguments which are structures based in defeasible derivations. The notion of argument is introduced by the following definition.
Definition 3.1
Let
Observe that although facts and strict rules are used in the defeasible derivation, the argument structure only mentions the defeasible rules. If there exists an argument
Example 3.2
From program
We can see that from the program
Arguments are related in different forms, and two interesting relations are the subargument relation and counterargument relation. But first, we will make some observations regarding the definition of argument.
As stated in Definition 3.1, a literal L has a supporting argument
Here, there exists a defeasible derivation for at_home from
Let us consider again the program
Next, we will describe the subargument and counterargument relations. In the following section these relations will be used in the introduction of an inference mechanism.
Given a d.l.p.
Two literals L and Q are said to disagree in the context of the program
In DeLP, an argument
Consider the program
Given a program
4.Warrants and answers for queries
A query is issued to a defeasible logic program
Informally, a literal Q will be warranted if there exists at least an argument
Let us consider again the program
Given a preference criterion, an argument
(a)
(b)
(c)
Observe that in the case that
In the context of program
The argument comparison criterion is modular in DeLP; hence, it is possible to use any preference criterion established over the set of arguments. This allows the user to select the most appropriate criterion for the application domain that is being represented. In García (2000), García and Simari (2004), and Ferretti, Errecalde, García, and Simari (2008), different argument comparison criteria were defined. In the examples of this paper we will use a comparison criterion that was introduced in García and Simari (2004). This argument preference relation uses a partial order defined over defeasible rules that is denoted by ‘<R’. The intuitive meaning of ‘R1<R R2’ is that: the rule R2 is preferred over R1 in the application domain described by the program.
In this argument comparison criterion, referred to as rule's priorities, an argument
(1) there exists at least a rule
(2) and there is no rule
Example 4.1
Consider the program
Lets discuss the relations between some of the arguments built from that program:
Then,
Observe that the argument
If an argument
More formally, given
There are undesirable situations, analysed in the literature, that can occur leading to an infinite argumentation line; for instance, if an argument is reintroduced in the sequence, the process could repeat itself indefinitely. Circular argumentation and other forms of fallacious argumentation have been studied in detail (see García & Simari, 2004, Simari et al., 1994b).
In DeLP, argumentation lines are required to be acceptable, that is, they have to be finite, an argument cannot appear twice in it, and the set of supporting (resp. interfering) arguments in the line have to be concordant. Given a program
The existence of blocking defeaters introduces another situation that is addressed by the last requirement; that is, after introducing a blocking defeater in a line, the next defeater is required to be a proper one to reinstate the blocked argument. Formally, an argumentation line
(1) Λ is a finite sequence.
(2) The set ΛS of supporting arguments (resp. ΛI) is concordant.
(3) No argument
(4) For all i, such that
For instance, from the program
This example shows how, given a program, there can be more than one argumentation line starting with the same argument
Let
(1) The root of the tree is labelled with
(2) Let N be a node labelled
Dialectical trees will be depicted as a tree where labelled triangles represent arguments and edges denote the defeat relation. An argument
Figure 1.
Dialectical tree
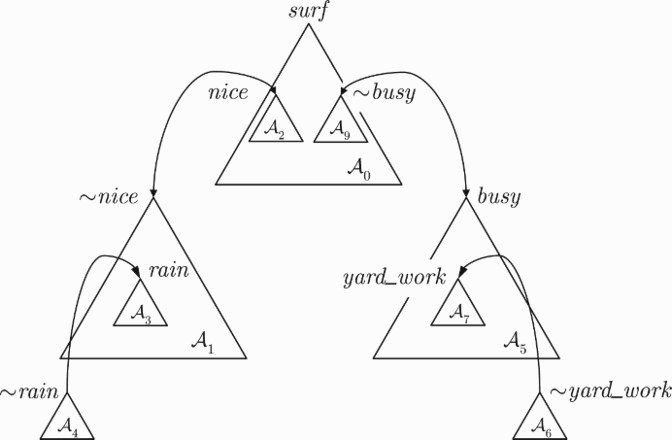
A dialectical tree provides a useful structure for considering all possible acceptable argumentation lines that can be generated for deciding whether an argument is defeated. We call this tree dialectical because it represents an exhaustive dialectical analysis for the argument in its root.
Given a literal L and an argument
(a)
(b)
Marked dialectical trees will be depicted as a tree where the nodes are triangles decorated with the result of the marking procedure and the directed edges denote the defeat relation. Figure 2 shows the marked dialectical tree for argument
Figure 2.
Marked dialectical tree
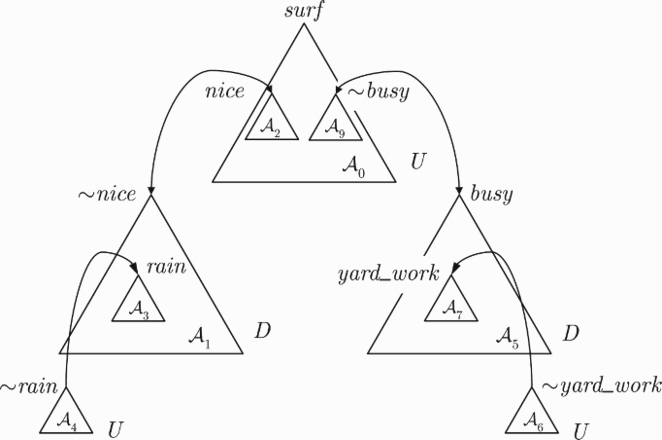
Given an argument
Definition 4.2
Let
A ground literal L is considered to be warranted if an argument
It has been observed in Chesñevar and Simari (2007) that the order in which the defeaters are considered is irrelevant to the final result of the marking process, only the argumentation lines are important for the outcome. The different tree configurations obtained from the set of argumentation lines (called bundle set) lead to the same marking of the root.
In García (2000) and García and Simari (2004) it was proved that in DeLP any claim C that has a strict derivation is warranted. This is so because any literal C that has a strict derivation from a program
The interpreter of DeLP takes a program
As an illustrating example, from the program
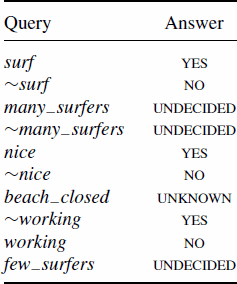
Observe that in the table above the literal beach_closed has the answer unknown, this is so because the literal beach_closed is not present in the signature of
5.DeLP reasoning servers and contextual queries
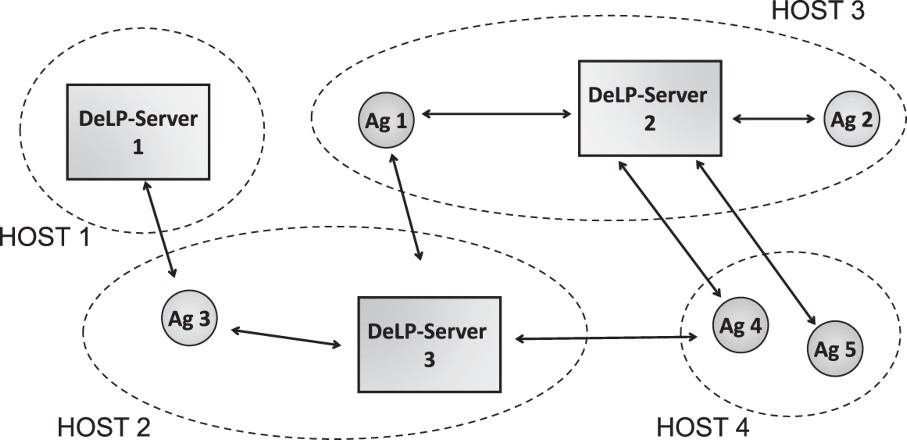
In MASs, reasoning can be seen as a service that can be offered as part of a knowledge-based infrastructure providing a mechanism to exploit it. In this section we describe DeLP Servers, that are the support of argumentative reasoning services conceived for a MAS setting. In such an environment, DeLP-Servers, introduced in García et al. (2007), provide client agents that can be distributed in remote hosts with the ability to consult different reasoning services implemented as DeLP-Servers that can be distributed themselves. Figure 3 schematically depicts a situation with three servers and five client agents distributed in four hosts.
Figure 3.
Agents can query different services with different knowledge bases.
Common (or public) knowledge can be stored in a server and represented as a DeLP-program; then, client agents may send queries to a DeLP-server and receive the corresponding answer. To respond to a query, a DeLP-server uses the knowledge stored in it; but, the server offers the possibility of integrating the knowledge stored in it with ‘private’ knowledge the client making the query has the possibility to send as part of the query.
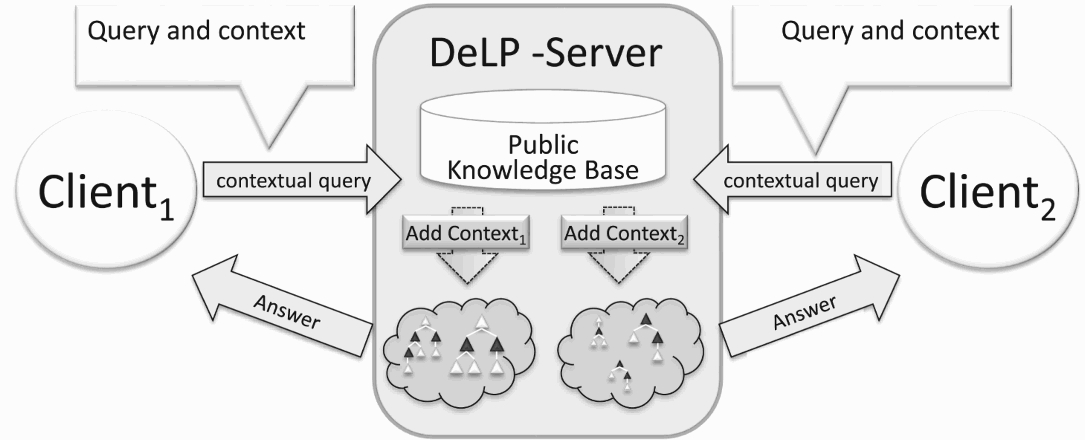
For example, consider a DeLP-server developed for a real-state application domain. A program can be stored in that server with some facts that represent the available properties for renting, and some defeasible rules that represent common knowledge modelling how to select a suited property. Then, client agents can consult for a property and submit, together with the query, some private information that represents its current situation or requirements (e.g. has children, works at home, has no car, cannot afford a rent of $ 3000 or more). If that is the case, this private knowledge is added temporarily to the knowledge stored in the server giving a particular context for the query. This context is private knowledge that the server will use for answering the query and will not affect other future queries. Thus, a client agent cannot make permanent changes to the public DeLP-program stored in a server. The temporal scope of the contextual information sent in a query is limited and it will disappear when the process performed by the DeLP-server to answer that query finishes. Continuing with our example, one client, Client1, can consult if some property p is suited for her, providing the context that she is single and has a car. Other client, Client2, can consult if p is suited for him, providing a different context: he has two children and work downtown. Since queries do not affect permanent changes in the program stored in a server, both contextual queries can be received and processed simultaneously, and one will not affect the answer of the other.
Below the concept of contextual query will be formalised. We will show that a contextual query provides to the server a particular DeLP-query, some contextual information in the form of DeLP-program and the information of how to integrate this contextual information with the public program stored in the server. To answer contextual queries, a DeLP-server uses both the common knowledge stored in it, and the context that clients can send attached to a query. The conceptual structure is described in Figure 4.
Figure 4.
Agents can query a DeLP-server creating a context.
Several agents can consult the same DeLP-server, and the same agent can consult several DeLP-Servers, as shown in Figure 3. For instance, in a particular medical application, dedicated DeLP-Servers can maintain different programs, supporting particular shared knowledge of specific specialties of the medical profession. Hence, an agent can pose the same contextual query to different servers, and obtain a different answer from each of the servers. Our approach does not impose any restriction over the type, architecture, or implementation language of the client agents. Next, we will formalise the above mentioned concepts introducing some examples.
Definition 5.1
A DeLP-Server is a triple
Thus, a DeLP-Server
Consider, for example, a DeLP-server for the real state application mentioned above. This server will have some public knowledge represented by the program
These defeasible rules should interpreted as follows. A convenient number of bedrooms in any available property provide reasons for considering it as a suited property; observe that the reasons for and against a convenient number of bedrooms depends on the private information a client might send as a context. Properties are not considered suited if they are expensive; to determine if a property is expensive for a client, the amount the client can afford to expend has to be provided in the contextual query.
In the previous section we explained how a DeLP-interpreter takes a DeLP-program, a DeLP-query (a literal), and returns one of the four DeLP possible answers: yes, no, undecided, and unknown. To put this more clearly, let
A contextual query to a DeLP-Server involves two elements: a particular DeLP-query Q to be answered, and contextual information Co to be used together with the program stored in the DeLP-Server to answer Q. This contextual information consists of both private knowledge in the form of a DeLP-program to be consider by the interpreter and appropriate operators that state how to integrate the private information with the public program stored at the server. Formally:
Definition 5.2
A contextual query for a DeLP-Server
In García et al. (2007) and Tucat et al. (2009) concrete examples of program operators were given. These operators are modular in the sense that each particular server can have a different set of operators that can be designed specifically for the application domain in use. Recall that in DeLP the set Π has to be non-contradictory; therefore, a DeLP-program operator must return a program where Π is non-contradictory. Below, we include, as an example, three simple and basic operators denoted by ⊕, ⊗, and ⊖, that will be used throughout the examples below.
To simplify the presentation, these three operator will be defined for a restricted DeLP-program
The first two operators, ⊕ and ⊗, integrate the defeasible part of the program representing the private knowledge and the defeasible part of the common knowledge stored in the server. The last one, ⊖, will eliminate the defeasible rules stored in the server that are in common with the defeasible part of the private knowledge present in the contextual query.
The first operator, denoted by ⊕, will integrate the private knowledge of an agent received as a DeLP-program
In contrast, the operator denoted by ⊗ gives priority to the facts that are part of the DeLP-program
Finally, the operator denoted by ⊖ was developed with the purpose of not considering for a particular query part of the public information maintained in the server. For instance, if the public knowledge in the server is
To provide an answer for a particular contextual query
Definition 5.3
Let
It is important to note that a context is a sequence and it will be processed by the DeLP-server in the order it appears in that sequence. Hence, different answers could be obtained depending on the order of the pairs in the context. Consider a DeLP-server
6.Explanations for answers
In this section we will discuss a direct application of DeLP-Servers to address an important topic in computational reasoning systems. The research included here has been reported in García, Rotstein, Chesñevar, and Simari (2009) and García et al. (2013), where more extensive presentations have been given.
Giving explanations regarding an answer coming from a computational system after a query is a question that has been addressed in several areas of Artificial Intelligence; quite naturally, the expert systems community Lacave and Diez (2004), Ye and Johnson (1995), and Guida and Zanella(1997) have explored possible solutions. Researchers in the area argumentation also have been concerned with providing their views (Belanger, 2007; Moulin, Irandoust, Bélanger, & Desbordes,2002; Walton, 2004); for instance, Walton (2004) has studied arguments and explanations from a philosophical point of view. He considers that the purpose of an argument is to get the hearer to come to accept something that is doubtful or unsettled, whereas the purpose of an explanation is to get the hearer to understand something that he already accepts as a fact.
In our approach, explanations aim to transfer the understanding of how the warrant status of a particular argument was obtained from a given argumentation framework. Thus, in our framework, an explanation (called δ-Explanation) will consist of a structure that reflects the analysis carried out in order to obtain such status, and it will contain those arguments and counterarguments that are considered in analysis leading to its warrant status.
In Lacave and Diez (2004), a review about explanations in heuristic expert systems is given and they offer the following definition:
… explaining consists in exposing something in such a way that it is understandable for the receiver of the explanation – so that he/she improves his/her knowledge about the object of the explanation – and satisfactory in that it meets the receiver's expectations.
Using the language in the fragment above to describe our approach, we will explain the warrant status of a claim by exposing the whole set of dialectical trees that was generated to study the warrant status of arguments related to the claim; this information is understandable from the receiver's point-of-view because all the arguments considered, their statuses (i.e. defeated/undefeated), and their interrelations are explicitly shown, and this information will be satisfactory for the receiver because it contains all the elements at stake in the dialectical analysis that supports the answer.
Example 6.1
Consider for instance the following scenario (García et al., 2013). Bob is an opera fan and there is an opera show tonight. Besides, today is Bob's birthday and he usually gets together with friends. Bob usually goes to the opera house with friends. However, today Bob's best friend is coming with her baby because of Bob's birthday, and is not a good idea to go to the opera with a baby. The DeLP-program
This program contains three facts and five defeasible rules that represent tentative information. The first defeasible rule states that if there is an opera show tonight then there is a good reason to go to the opera house. The second defeasible rule represents that in his birthday Bob usually gets together with friends. The third one states that if friends are coming, Bob would probably stay at home. However, the fourth rule establishes that being with friends and the fact that there is an opera show that night will give a good reason to go to the opera. The fifth rule states that this situation changes if a friend is coming with a baby.
From program
Let's assume the following priorities over rules:
From this program and the associated priorities, the argument
From the program
Since an explanation has to further the understanding of the warrant status of a DeLP-query Q, our approach to giving an explanation will consist of a structure that includes those marked dialectical trees that are considered for establishing such status. This will include both marked dialectical trees for arguments that support Q, and also marked dialectical trees for arguments that support
Definition 6.2
Let
Let
The sets
As stated above, the purpose of an explanation is to transfer the understanding of how the warrant status of a particular argument is obtained from a given argumentation framework. Consequently, an explanation will consist of a structure that reflects the analysis carried out in order to obtain such status, and it will contain those arguments and counterarguments that are considered in this analysis, showing explicitly how they relate to one another. That is, a δ-Explanation
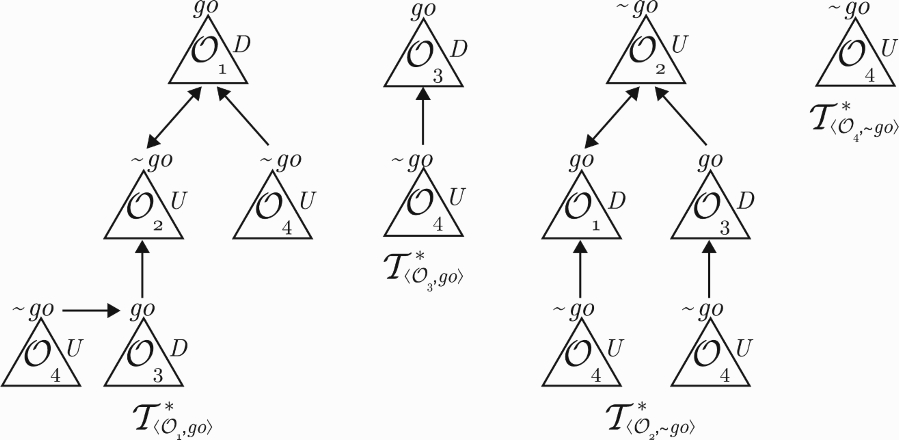
Consider the program
Figure 5.
Dialectical trees in the δ-Explanation for ‘∼ go’.
6.1Schematic queries and generalised δ-Explanations
A DeLP-schematic query to a DeLP-program is a literal that at least has one variable. It represents the set of DeLP-queries that unify with it only containing constants from the signature of the language of the program. Schematic queries introduce the possibility of asking questions that are more general than ground queries; for instance, consider the program introduced below in Example 6.3, the schematic query
Example 6.3
Consider the DeLP-program
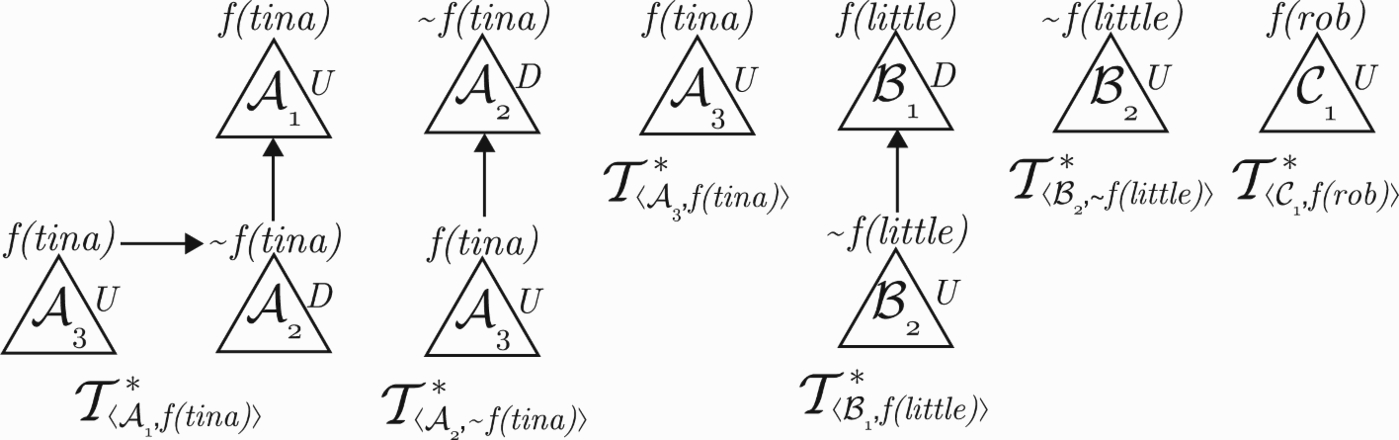
Observe that potentially, the variable X contained in the the schematic query flies(X) has an infinite number of terms that unify with that variable. However, all queries produced unifying with terms that are not in the signature of the language of this program; e.g. flies(mac) in Example 6.3, will produce the answer unknown and therefore the explanation will be empty. Thus, the set of instances of a schematic query that will be considered for generating a generalised δ-Explanation will refer only to those instances of DeLP-queries that contain constants from the program signature. For instance, in the DeLP-program of Example 6.3, the schematic query flies(X) will only refer to flies(tina), flies(rob), and flies(little).
Schematic queries introduce the possibility of asking questions that are more general than ground queries. With this type of query we are not asking whether a certain piece of knowledge can be believed (warranted), instead we are asking if there exists an instance of that piece of knowledge (related to particular individuals) that can be warranted in the system. This approach could lead to a deeper kind of reasoning as we may pose a query, gather the warranted instances and continue the reasoning process with those individuals. As introduced next, an explanation for a schematic query will contain the explanation for the individual DeLP-queries it represents.
Definition 6.4
Let
It is interesting to observe that a δ-Explanation is a particular case of a Generalised δ-Explanation, where the set
Consider again the DeLP-program
Figure 6.
Dialectical trees associated with the explanation for ‘∼ f(X)’.
Consider a schematic query Q(X) and a DeLP-program
Let
yes, if there exists an instance
no, if for every instance
undecided, if there is no instance
unknown, if
For example, let's assume that from a particular program
The answer for p(X) is yes because there is an instance (p(a)) for which the answer is yes. The answer for t(X) is undecided because there is no warranted instance, and there is one instance (t(c)) for which the answer is undecided. The answer for k(X) is no because all the instances return no. The answer for j(X) is unknown.
Finally, note that from a DeLP programmer point-of-view, δ-Explanations provide a global idea of the interactions among arguments within the context of a query. This is an essential debugging tool while programming: whenever unexpected behaviour arises, the programmer can check the given explanations to detect errors.
7.Extensions and variations on DeLP
Several extensions of DeLP have been proposed and in this section we will briefly sketch a few of these developments. The following are some of these research lines that are more related to applications.
Possibilistic Defeasible Logic Programming (P-DeLP) (Alsinet, Chesñevar, Godo, Sandri, & Simari, 2008; Chesñevar, Simari, Alsinet, & Godo, 2004), is an extension of DeLP that allows the treatment of possibilistic uncertainty and fuzzy knowledge at object-language level in a logic programming language. In P-DeLP, knowledge representation features are formalised based on a possibilistic logic based on the Horn-rule fragment of Gödel fuzzy logic (PGL). Formulas in PGL are built over fuzzy propositional variables and the certainty degree of formulas is expressed with a necessity measure. The proof method for PGL, in a logic programming setting, is based on a complete calculus for determining the maximum degree of possibilistic entailment of a fuzzy goal. In a multiagent context, it is possible to use P-DeLP to encode the agents’ knowledge about the world, applying the argument and warrant computing procedure to obtain their inferences. In particular, we have also a number of argument-based consequence operators which allow us to model different aspects of the reasoning abilities in an intelligent agent which have been formalised and studied; the computational problem related to how answers to P-DeLP queries can be sped up by pruning the associated search space have been considered.
The representation of strength and time provide useful elements in many argumentation applications. The Strength and Time DeLP, ST-DeLP, is an instantiation of the abstract framework E-TAF (Budán, Gómez Lucero, Chesñevar, & Simari, 2012) based on DeLP that incorporates the representation of temporal availability and strength factors varying over time associated with the elements of the language of DeLP. It also specifies how arguments are built, and how the availability and strength of arguments are obtained from the corresponding information attached to the elements from which they are built. After determining the availability of attacks by comparing strength of conflicting arguments over time, E-TAF definitions are applied to establish temporal acceptability of arguments. Thus, the main contribution of this development is the integration of time and strength in the context of argumentation systems. Other lines of work related to this can be found in Pardo and Godo (2011).
In García, García, and Simari (2008) an argumentation-based planning formalism has been introduced. This system can be used by an agent to construct plans using partial order planning technics, In such a manner that the traditional POP algorithm is extended to consider arguments as planning steps. When actions and arguments are combined to construct plans, new types of interferences appear ant it is necessary to extend the standard notion of threat to consider: action-action, action-argument, and argument-argument threats. The resulting algorithm is called APOP, and extends the traditional POP algorithm to consider actions and arguments as planning steps and resolve the new types of threats using new methods.
A framework for ontology integration of DL ontologies based on DeLP was introduced in Gómez, Chesñevar, and Simari (2013). In this work, the limitations for reasoning in the presence of inconsistent ontologies that Description Logic (DL) ontologies suffer are addressed using defeasible argumentation to model different DL reasoning capabilities when handling inconsistent ontologies, resulting in so-called d-ontologies. ONTOarg, provides a decision support framework for performing local-as-view integration of possibly inconsistent and incomplete ontologies in terms of DeLP. This ontology integration system is able to handle inconsistent DL-based ontologies by performing a dialectical analysis in order to determine the membership of individuals to concepts.
Another recent line of research deals with the problem of massively built arguments from premises obtained from relational databases and compute warrant (Deagustini et al., 2013). In this setting, different databases can be updated by external, independent applications, leading to changes in the spectrum of available arguments. Algorithms for integrating a database management system with an argument-based inference engine have been designed and tested. The empirical results and running-time analysis associated with the approach show how, taking advantage of modern DBMS technologies, it is possible to efficiently implement processes that requiere massive argumentation. This provides an interesting possibility for developing new architectures for knowledge-based applications, such as Decision Support Systems and Recommender Systems, that could efficiently use argumentation as the underlying inference model.
Notes
1 We will use the term knowledge base and defeasible logic program interchangeably when no confusion may arise.
References
1 | Alferes, J.J., Pereira, L.M., & Przymusinski, T.C. ((1996) ). Strong and explicit negation in nonmonotonic reasoning and logic programming. Lecture Notes in Computer Science, 1126: , 143–163. doi: 10.1007/3-540-61630-6_10 |
2 | Alsinet, T., Chesñevar, C.I., Godo, L., Sandri, S., & Simari, G.R. ((2008) ). Formalizing argumentative reasoning in a possibilistic logic programming setting with fuzzy unification. International Journal of Approximate Reasoning, 48: , 711–729. doi: 10.1016/j.ijar.2007.07.004 |
3 | Baral, C., & Gelfond, M. ((1994) ). Logic programming and knowledge representation. Journal of Logical Programming, 19/20: , 73–148. doi: 10.1016/0743-1066(94)90025-6 |
4 | Belanger, M. ((2007) ). Exploitation of argumentation models for mission analysis. In T. Roth-Berghofer, S. Schulz, D. Bahls & D.B. Leake (Eds.), Explanation-aware computing, papers from the 2007 AAAI workshop (pp. 64–67). Vol. WS-07-06 of AAAI Tech. Report. Vancouver, Canada: AAAI Press. |
5 | Bench-Capon, T.J.M., & Dunne, P.E. ((2007) ). Argumentation in artificial intelligence. Artificial Intelligence, 171: , 619–641. doi: 10.1016/j.artint.2007.05.001 |
6 | Besnard, P., & Hunter, A. ((2001) ). A logic-based theory of deductive arguments. Artificial Intelligence, 128: , 203–235. doi: 10.1016/S0004-3702(01)00071-6 |
7 | Besnard, P., & Hunter, A. ((2008) ). Elements of argumentation. Cambridge, MA: MIT Press. |
8 | Bondarenko, A., Dung, P.M., Kowalski, R.A., & Toni, F. ((1997) ). An abstract, argumentation-theoretic approach to default reasoning. Artificial Intelligence, 93: , 63–101. doi: 10.1016/S0004-3702(97)00015-5 |
9 | Bondarenko, A., Toni, F., & Kowalski, R.A. ((1993) ). An assumption-based framework for non-monotonic reasoning. In Logic Programming and Nonmonotonic Reasoning, Lisbon, Portugal (pp. 171–189), Boston, MA: The MIT Press. |
10 | Budán, M.C., Gómez Lucero, M.J., Chesñevar, C.I., & Simari, G.R. ((2012) ). Modelling time and reliability in structured argumentation frameworks. In G. Brewka, T. Eiter & S.A. McIlraith (Eds.), Principles of Knowledge Representation and Reasoning: Proceedings of the Thirteenth International Conference, Rome, Italy, 2012. Rome, Italy, AAAI Press (Menlo Park, CA), pp. 578–582. |
11 | Chesñevar, C.I., Maguitman, A.G., & Loui, R.P. ((2000) ). Logical models of argument. ACM Computing Surveys, 32: , 337–383. doi: 10.1145/371578.371581 |
12 | Chesñevar, C.I., & Simari, G.R. (2007). A lattice-based approach to computing warranted beliefs in skeptical argumentation frameworks. In M.M. Veloso (Ed.), Proceedings of the 20th International Joint Conference on Artificial Intelligence, Hyderabad, India, January (pp. 280–285), AAAI Press (Menlo Park, CA), Hyderabad, India. |
13 | Chesñevar, C.I., Simari, G.R., Alsinet, T., & Godo, L. ((2004) ). A logic programming framework for possibilistic argumentation with vague knowledge. In D.M. Chickering & J.Y. Halpern (Eds.), UAI (pp. 76–84). Banff, Canada: AUAI Press. |
14 | Deagustini, C.A.D., Fulladoza Dalibón, S.E., Gottifredi, S., Falapp. , M.A., Chesñevar, C.I., & Simari, G.R. ((2013) ). Relational databases as a massive information source for defeasible argumentation. Knowledge-Based Systems (online). |
15 | Dung, P.M. ((1993) ). On the acceptability of arguments and its fundamental role in nonmonotonic reasoning and logic programming. In R. Bajcsy (Ed.), Proceedings of the 13th International Joint Conference on Artificial Intelligence. Chambéry, France (pp. 852–859), Morgan Kauffman (Burlington, MA), Chambéry, France. |
16 | Dung, P.M. ((1995) ). On the acceptability of arguments and its fundamental role in nonmonotonic reasoning, logic programming and n-person games. Artificial Intelligence, 77: , 321–357. doi: 10.1016/0004-3702(94)00041-X |
17 | Ferretti, E., Errecalde, M., García, A.J., & Simari, G.R. ((2008) ). Decision rules and arguments in defeasible decision making. In P. Besnard, S. Doutre & A. Hunter (Eds.), Proc. 2nd Int. Conference on Computational Models of Arguments (COMMA) (pp. 171–182), Vol. 172 of Frontiers in Artificial Intelligence and Applications. Toulouse, France: IOS Press. |
18 | García, A.J. ((2000) ). Defeasible logic programming: Definition, operational semantics and parallelism (Ph.D. thesis). Computer Science and Engineering Department, Universidad Nacional del Sur, Bahía Blanca, Argentina. |
19 | García, A.J., Chesñevar, C.I., Rotstein, N.D., & Simari, G.R. ((2013) ). Formalizing dialectical explanation support for argument-based reasoning in knowledge-based systems. Expert Systems with Applications, 40: , 3233–3247. doi: 10.1016/j.eswa.2012.12.036 |
20 | García, D.R., García, A.J., & Simari, G.R. ((2008) ). Defeasible reasoning and partial order planning. In S. Hartmann & G. Kern-Isberner (Eds.), FoIKS (pp. 311–328). Vol. 4932 of Lecture Notes in Computer Science. Pisa, Italy: Springer. |
21 | García, A.J., Rotstein, N.D., Chesñevar, C.I., & Simari, G.R. ((2009) ). Explaining why something is warranted in defeasible logic programming. In ExaCt 2009 (pp. 25–36). Pasadena, CA: IJCAI. |
22 | García, A.J., Rotstein, N.D., Tucat, M., & Simari, G.R. ((2007) ). An argumentative reasoning service for deliberative agents. In Z. Zhang & J.H. Siekmann (Eds.), Proceedings of the Second International Conference on Knowledge Science, Engineering and Management, KSEM 2007, November 28–30 (pp. 128–139). Vol. 4798 of Lecture Notes in Computer Science. Melbourne: Springer. |
23 | García, A.J., & Simari, G.R. ((2004) ). Defeasible logic programming: An argumentative approach. Theory and Practice of Logic Programming, 4: , 95–138. doi: 10.1017/S1471068403001674 |
24 | Gómez, S.A., Chesñevar, C.I., & Simari, G.R. ((2013) ). ONTOarg: A decision support framework for ontology integration based on argumentation. Expert Systems with Applications, 40: , 1858–1870. doi: 10.1016/j.eswa.2012.10.025 |
25 | Guida, G., & Zanella, M. ((1997) ). Bridging the gap between users and complex decision support systems: The role of justification. In ICECCS ’97: Proc. 3rd IEEE Int. Conf. on Eng. of Complex Computer Systems (pp. 229–238). Washington. |
26 | Lacave, C., & Diez, F.J. ((2004) ). A review of explanation methods for heuristic expert systems. Knowledge Engineering Review, 19: , 133–146. doi: 10.1017/S0269888904000190 |
27 | Lifschitz, V. ((1996) ). Foundations of logic programs. In G. Brewka (Ed.), Principles of knowledge representation (pp. 69–128). Stanford: CSLI Pub. |
28 | Lin, F., & Shoham, Y. ((1989) ). Argument systems: A uniform basis for nonmonotonic reasoning. In R.J. Brachman, H.J. Levesque & R. Reiter (Eds.), Proceedings of the 1st International Conference on Principles of Knowledge Representation and Reasoning (KR’89) (pp. 245–255). Toronto, Canada: Morgan Kaufmann. |
29 | Loui, R.P. ((1987) ). Defeat among arguments: A system of defeasible inference. Computational Intelligence, 3: , 100–106. doi: 10.1111/j.1467-8640.1987.tb00178.x |
30 | Martínez, M.V., García, A.J., & Simari, G.R. ((2012) ). On the use of presumptions in structured defeasible reasoning. In B. Verheij, S. Szeider & S. Woltran (Eds.), Computational Models of Argument, Proceedings of COMMA 2012 (pp. 185–196). Vol. 245 of Frontiers in Artificial Intelligence and Applications. Vienna, Austria: IOS Press. |
31 | McCarthy, J. ((1980) ). Circumscription – a form of non-monotonic reasoning. Artificial Intelligence, 13: , 27–39. doi: 10.1016/0004-3702(80)90011-9 |
32 | McDermott, D.V., & Doyle, J. ((1980) ). Non-monotonic logic I. Artificial Intelligence, 13: , 41–72. doi: 10.1016/0004-3702(80)90012-0 |
33 | Modgil, S., & Prakken, H. ((2013) ). A general account of argumentation with preferences. Artificial Intelligence, 195: , 361–397. doi: 10.1016/j.artint.2012.10.008 |
34 | Moore, R.C. ((1984) ). Possible-world semantics for autoepistemic logic. In Workshop on Nonmotononic Reasoning (pp. 344–354), AAAI Press (Menlo Park, CA), New Paltz, NY. |
35 | Moulin, B., Irandoust, H., Bélanger, M., & Desbordes, G. ((2002) ). Explanation and argumentation capabilities: Towards the creation of more persuasive agents. Artificial Intelligence Review, 17: , 169–222. doi: 10.1023/A:1015023512975 |
36 | Nute, D. ((1987) ). Defeasible reasoning. In Proceedings of the 20th Hawaii International Conference on System Science, Hawaii, USA (pp. 470–477). |
37 | Nute, D. ((1988) ). Defeasible reasoning: A philosophical analysis in Prolog. In J.H. Fetzer (Ed.), Aspects of artificial intelligence (pp. 251–288). Dordrecht, The Netherlands: Kluwer Academic Pub. |
38 | Pardo, P., & Godo, L. ((2011) ). t-DeLP: A temporal extension of the defeasible logic programming argumentative framework. In S. Benferhat & J. Grant (Eds.), SUM 2011 Proceedings of the 5th International Conference on Scalable Uncertainty Management (pp. 489–503). Vol. 6929 of Lecture Notes in Computer Science. Dayton, Ohio: Springer. |
39 | Pollock, J.L. ((1987) ). Defeasible reasoning. Cognitive Science, 11: , 481–518. doi: 10.1207/s15516709cog1104_4 |
40 | Pollock, J.L. ((1996) ). A general-purpose defeasible reasoner. Journal of Applied Non-Classical Logics, 6: , 89–113. doi: 10.1080/11663081.1996.10510868 |
41 | Prakken, H. ((2010) ). An abstract framework for argumentation with structured arguments. Argument & Computation, 1: , 93–124. doi: 10.1080/19462160903564592 |
42 | Prakken, H., & Vreeswijk, G. ((2002) ). Logics for defeasible argumentation. In D. Gabbay & F. Guenthner (Eds.), Handbook of philosophical logic (pp. 218–319). Dordrecht, The Netherlands: Kluwer Academic Pub. |
43 | Rahwan, I., & Simari, G.R. ((2009) ). Argumentation in artificial intelligence. Heidelberg, Germany: Springer. |
44 | Reiter, R. ((1980) ). A logic for default reasoning. Artificial Intellence, 13: , 81–132. doi: 10.1016/0004-3702(80)90014-4 |
45 | Simari, G.R. ((1989) ). A mathematical treatment of defeasible reasoning and its implementation. Washington University, Department of Computer Science (Saint Louis, MO: EE.UU.). |
46 | Simari, G.R., Chesñevar, C.I., & García, A.J. ((1994) a). Focusing inference in defeasible argumentation. In IV Iberoamerican Conference on Artificial Intelligence, October, IBERAMIA’94, Caracas, Venezuela. |
47 | Simari, G.R., Chesñevar, C.I., & García, A.J. ((1994) b). The role of dialectics in defeasible argumentation. In XIV International Conference of the Chilenean Computer Science Society, November, Sociedad Chilena de Ciencias de la Computacion, Concepcion, Chile. |
48 | Simari, G.R., & Loui, R.P. ((1992) ). A mathematical treatment of defeasible reasoning and its implementation. Artificial Intelligence, 53: , 125–157. doi: 10.1016/0004-3702(92)90069-A |
49 | Tucat, M., Garcia, A.J., & Simari, G.R. ((2009) ). Using defeasible logic programming with contextual queries for developing recommender servers. In AAAI Fall Symposium Series, AAAI Press (Menlo Park, CA), Arlington, VA. |
50 | Walton, D. ((2004) ). A new dialectical theory of explanation. Philosophical Explorations, 7: , 71–89. doi: 10.1080/1386979032000186863 |
51 | Ye, L.R., & Johnson, P.E. ((1995) ). The impact of explanation facilities on user acceptance of expert systems advice. MIS Quarterly, 19: , 157–172. doi: 10.2307/249686 |


